

8.8. Двухконтурняя статическая оптимяльная сар с
ПОСЛЕДОВАТЕЛЬНОЙ КОРРЕКЦИЕЙ
8.8.1. Объкт регулировяния сар
1.
В качестве объекта регулирования может
быть принята схема, представленная на
рис. 8.20 в составе трех звеньев: двух
апериодических и одного интегрирующего.
К такой схеме может быть приведена
структурная схема двигателя постоянного
тока, получающего питание от преобразователя
с постоянной времени
![]() .
Постоянная времени
.
Постоянная времени![]() является наименьшей среди постоянных
времени объекта регулирования. В случае
использования в качестве объекта
регулирования двигателя постоянного
тока, постоянные времени
является наименьшей среди постоянных
времени объекта регулирования. В случае
использования в качестве объекта
регулирования двигателя постоянного
тока, постоянные времени![]() ,
,![]() и
и![]() могут быть определены по параметрам
двигателя.
могут быть определены по параметрам
двигателя.
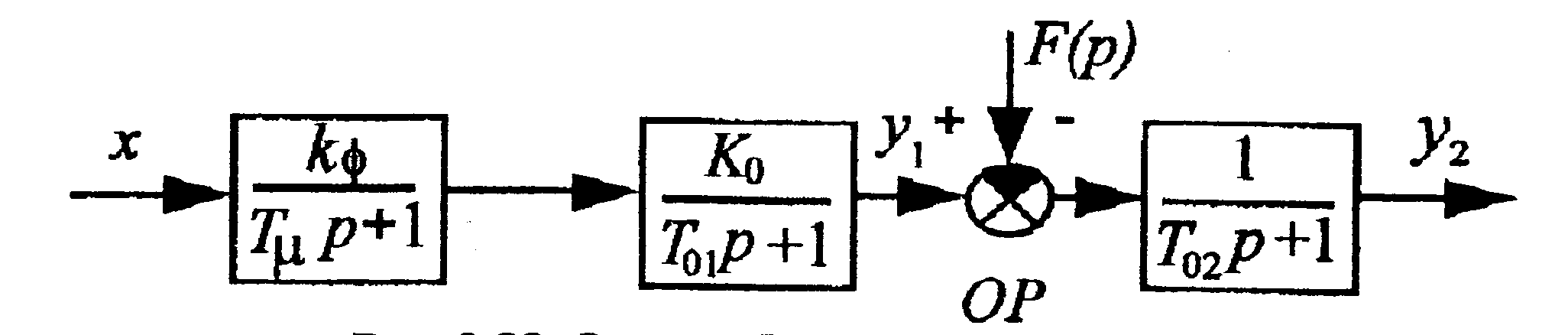
Рис. 8.20. Схема объекта регулирования
2. Построение структурной схемы двухконтурной оптимальной статической САР
Проектируемая САР должна быть статической по возмущающему воздействию и астатической - по управляющему воздействию. Такие системы строятся с оптимальной настройкой по модульному оптимуму и называются однократно интегрирующими системами с последовательной коррекцией.
Объект
регулирования содержит две больших
постоянных времени
![]() и
и![]() ,
и одну малую, так называемую
некомпенсируемую постоянную времени
,
и одну малую, так называемую
некомпенсируемую постоянную времени![]() .
В соответствии с принципом построения
систем подчиненного регулирования,
каждая большая постоянная времени
может быть скомпенсирована своим
регулятором. Поэтому необходимо иметь
два контура регулирования. Причем в
каждом контуре должны быть два звена
ОР с большой и малой постоянными времени
(рис. 8.21).
.
В соответствии с принципом построения
систем подчиненного регулирования,
каждая большая постоянная времени
может быть скомпенсирована своим
регулятором. Поэтому необходимо иметь
два контура регулирования. Причем в
каждом контуре должны быть два звена
ОР с большой и малой постоянными времени
(рис. 8.21).
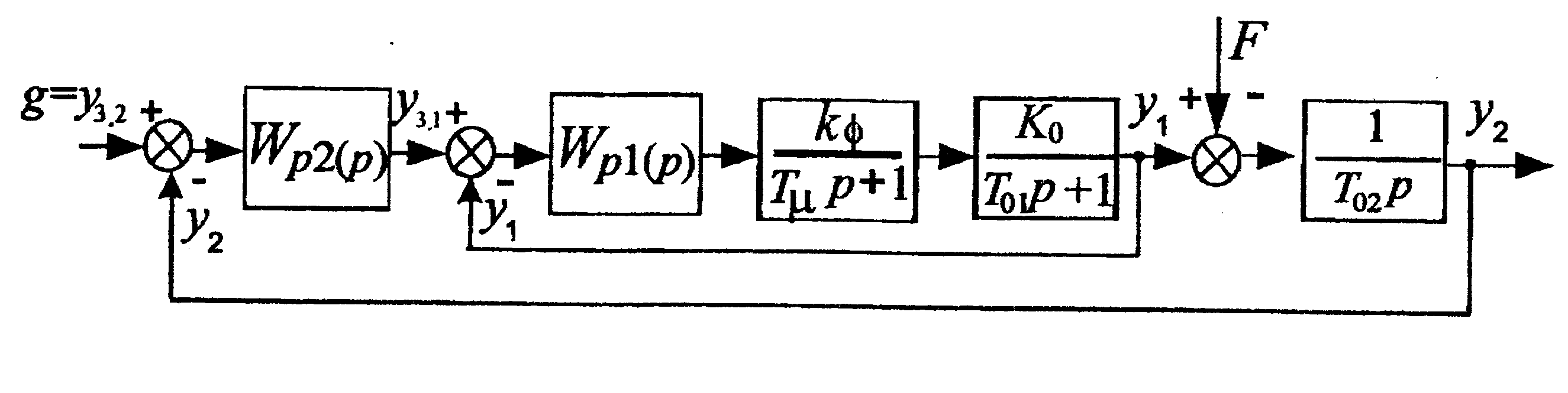
Рис. 8.21. Структурная схема двухконтурной системы подчиненного регулирования
Структурная схема двухконтурной САР, построенной в соответствии с этими принципами, примет следующий вид (см. рис. 8.21). К САР приложены следующие внешние воздействия:
g
=![]() - управляющее воздействие;
- управляющее воздействие;
F- внешнее возмущающее воздействие.
Регулируемыми выходными координатами являются:
![]() -
выходная регулируемая координата
первого, внутреннего, контура;
-
выходная регулируемая координата
первого, внутреннего, контура;
![]() -
выходная регулируемая координата
второго, внешнего, контура.
-
выходная регулируемая координата
второго, внешнего, контура.
8.8.2. Расчет и исследование внутреннего контура
CTАТИЧЕСКОЙ CAP
Структурная схема внутреннего контура регулирования представлена на рис. 8.22.
Передаточная функция регулятора внутреннего контура регулирования может быть найдена по обобщенной формуле
![]() (8.45)
(8.45)
Где
![]() - постоянная времени обратной связи
регулятора;
- постоянная времени обратной связи
регулятора;
![]() -
постоянная времени интегрирования
регулятора;
-
постоянная времени интегрирования
регулятора;
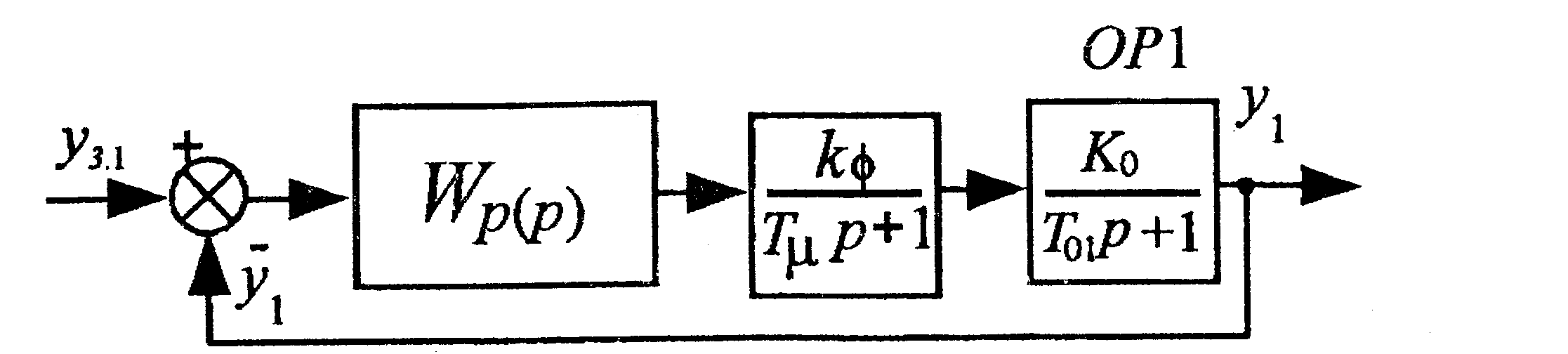
Рис. 8.22. Структурная схема внутреннего контура двухконтурной статической САР
![]() -
передаточная функция той части объекта
регулирования, которая компенсируется
регулятором первого контура;
-
передаточная функция той части объекта
регулирования, которая компенсируется
регулятором первого контура;
![]() -
коэффициент обратной связи внутреннего
контура регулирования (
-
коэффициент обратной связи внутреннего
контура регулирования (![]() =1).
=1).
Таким образом, для регулятора имеем следующую передаточную функцию:
![]() (8.46)
(8.46)
т.е. регулятор имеет пропорционально-интегральную характеристику. Параметры регулятора могут быть найдены после подстановки в выражение (8.46) исходных данных объекта регулирования.
Передаточная функция разомкнутого внутреннего контура
![]()
![]()
Следовательно,
в разомкнутом внутреннем контуре
имеется интегрирующее звено. Наличие
такого звена в контуре регулирования
приводит к тому, что в установившемся
режиме (статике) отсутствует ошибка
регулирования выходной величины
![]() в соответствии с заданным значением
в соответствии с заданным значением![]() .
.
Передаточная функция замкнутого внутреннего контура
![]() (8.47)
(8.47)
где
![]() -
эквивалентная постоянная времени
внутреннего контура;
-
эквивалентная постоянная времени
внутреннего контура;
![]() =0,707
- коэффициент демпфирования контура.
=0,707
- коэффициент демпфирования контура.
Таким
образом, передаточные функции разомкнутого
и замкнутою контуров соответствуют
оптимальной системе второго порядка
(8.13) и (8.14), т.е. внутренний контур
регулирования двухконтурной САР
оптимизирован по модульному оптимуму.
Поэтому переходная функция![]() будет оптимальной и определится
выражением (8.23). Такая переходная функция
представлена на рис. 8.8.
будет оптимальной и определится
выражением (8.23). Такая переходная функция
представлена на рис. 8.8.
Параметры переходного процесса также оптимальны. Они получены при оптимальной настройке регулятора, при которой
![]()
где
![]() -
постоянная времени обратной связи
регулятора;
-
постоянная времени обратной связи
регулятора;
![]() -
постоянная времени интегрирования
регулятора;
-
постоянная времени интегрирования
регулятора;
а
= 2 - оптимальное значение коэффициента,
определяющего соотношение постоянных
времени замкнутого контура. На
динамические показатели замкнутого
внутреннего контура оказывает влияние
действительная настройка регулятора,
а именно, выбор значений постоянных
времени регулятора
![]() и
и![]() .
Динамические показатели САР в этом
случае могут быть оценены по частотным
методам оценки качества САР. Для этого
необходимо построить логарифмические
амплитудную
.
Динамические показатели САР в этом
случае могут быть оценены по частотным
методам оценки качества САР. Для этого
необходимо построить логарифмические
амплитудную![]() и фазовую
и фазовую![]() частотные
характеристики САР с использованием
передаточных функций разомкнутой и
замкнутой САР.
частотные
характеристики САР с использованием
передаточных функций разомкнутой и
замкнутой САР.
Наиболее точно динамические показатели могут быть определены путем расчета переходных процессов по методу структурного моделирования на ЦВМ. При этом желательно исследовать следующие варианты настройки параметров регулятора:
а) изменение
постоянной времени интегрирования
![]() регулятора:
регулятора:
1)
![]() ,
,![]() -
базовый вариант оптимальной настройки;
-
базовый вариант оптимальной настройки;
2) ![]() ,
,![]() ;
;
3) ![]() ,
,![]() ;
;
б) изменение
постоянной времени обратной связи
![]() регулятора:
регулятора:
1) ![]() =
=![]() ,
,![]() -
базовый вариант;
-
базовый вариант;
2) ![]() =
=![]() ,
,![]() ;
;
3)
![]() =
=![]() ,
,![]() ;
;
На
рис. 8.23 представлены в качестве примера
переходные процессы внутреннего контура
САР для рассмотренных выше вариантов:
а) при изменении
![]() б) при изменении
б) при изменении![]() .
.
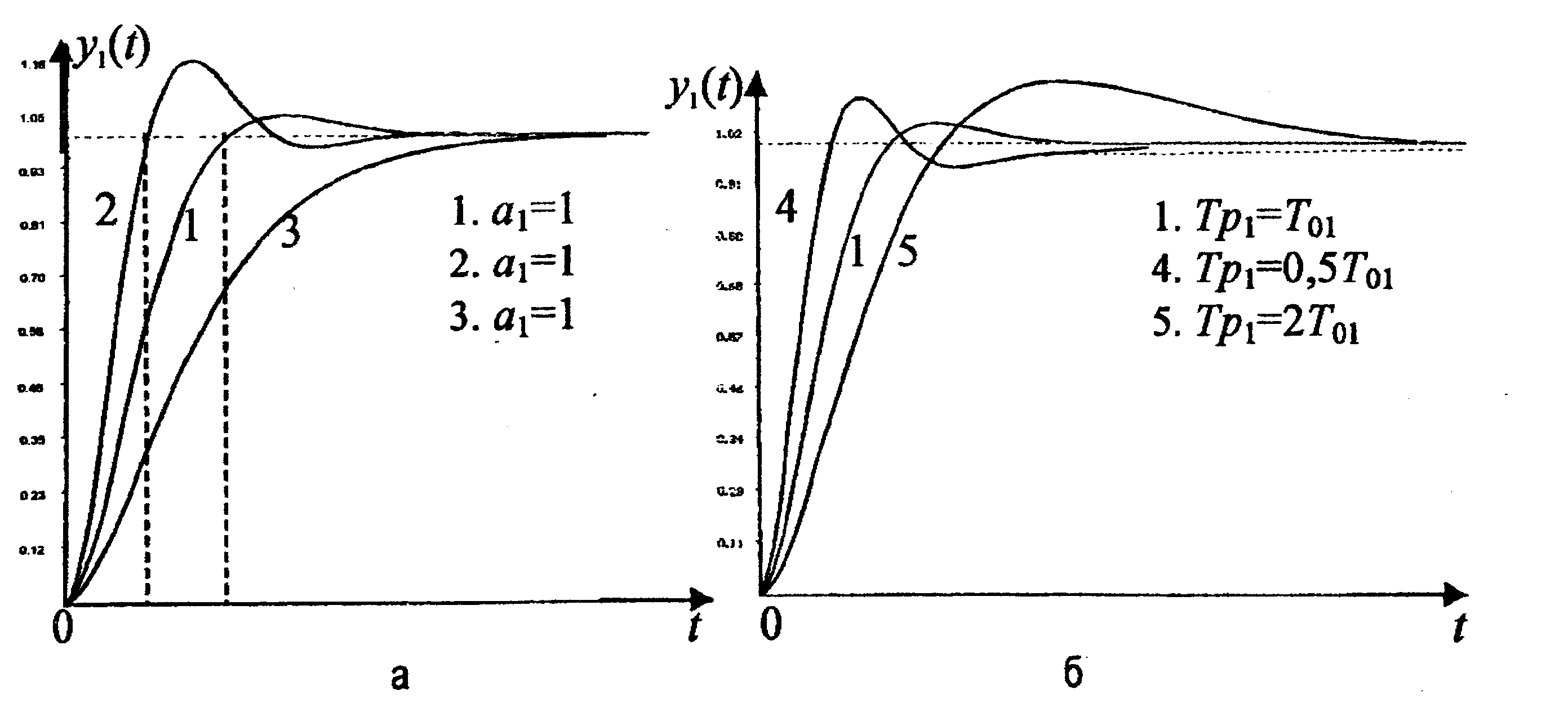
Рис.
8.23. Кривые переходных процессов: а) при
изменении
![]() б) при изменении
б) при изменении![]() .
.
Анализ переходных процессов, представленных на рис. 8.23, показывает
- при
уменьшении постоянной времени
![]() (коэффициента а) снижается время
переходного процесса, но возрастает
перерегулирование;
(коэффициента а) снижается время
переходного процесса, но возрастает
перерегулирование;
- при
возрастании величины
![]() (коэффициента а) снижается перерегулирование
за счет увеличения времени переходного
процесса;
(коэффициента а) снижается перерегулирование
за счет увеличения времени переходного
процесса;
- изменение
постоянной времени
![]() в
сторону уменьшения или увеличения по
сравнению с оптимальным значением
в
сторону уменьшения или увеличения по
сравнению с оптимальным значением![]() =
=![]() приводит
к увеличению перерегулирования при
уменьшении времени переходного процесса
в первом случае и увеличении его во
втором случае;
приводит
к увеличению перерегулирования при
уменьшении времени переходного процесса
в первом случае и увеличении его во
втором случае;
- оптимальный
переходный процесс обеспечивается
только при оптимальной настройке
регулятора, т.е. при
![]() =
=![]() и а = 2 (первый вариант).
и а = 2 (первый вариант).
По кривым переходных процессов или по их табличным данным могут быть определены показатели качества САР.
Для
этой цели могут быть использованы также
логарифмические амплитудная
![]() и
фазовая
и
фазовая![]() частотные
характеристики САР, построенные на
основе передаточных функций разомкнутой
и замкнутой систем для указанных
вариантов изменения параметров
регулятора. Например, передаточные
функции разомкнутых САР при изменении
частотные
характеристики САР, построенные на
основе передаточных функций разомкнутой
и замкнутой систем для указанных
вариантов изменения параметров
регулятора. Например, передаточные
функции разомкнутых САР при изменении![]() (вариант 1,2 и 3) имеют вид
(вариант 1,2 и 3) имеют вид
![]() ;
;
![]()
![]()
Построенные
для этих случаев ЛАЧХ![]() и
ЛФЧХ
и
ЛФЧХ![]() представлены на рис. 8.24.
представлены на рис. 8.24.
Аналогично
можно получить передаточные функции
и построить логарифмические частотные
характеристики системы при изменении
постоянной времени
![]() .
.
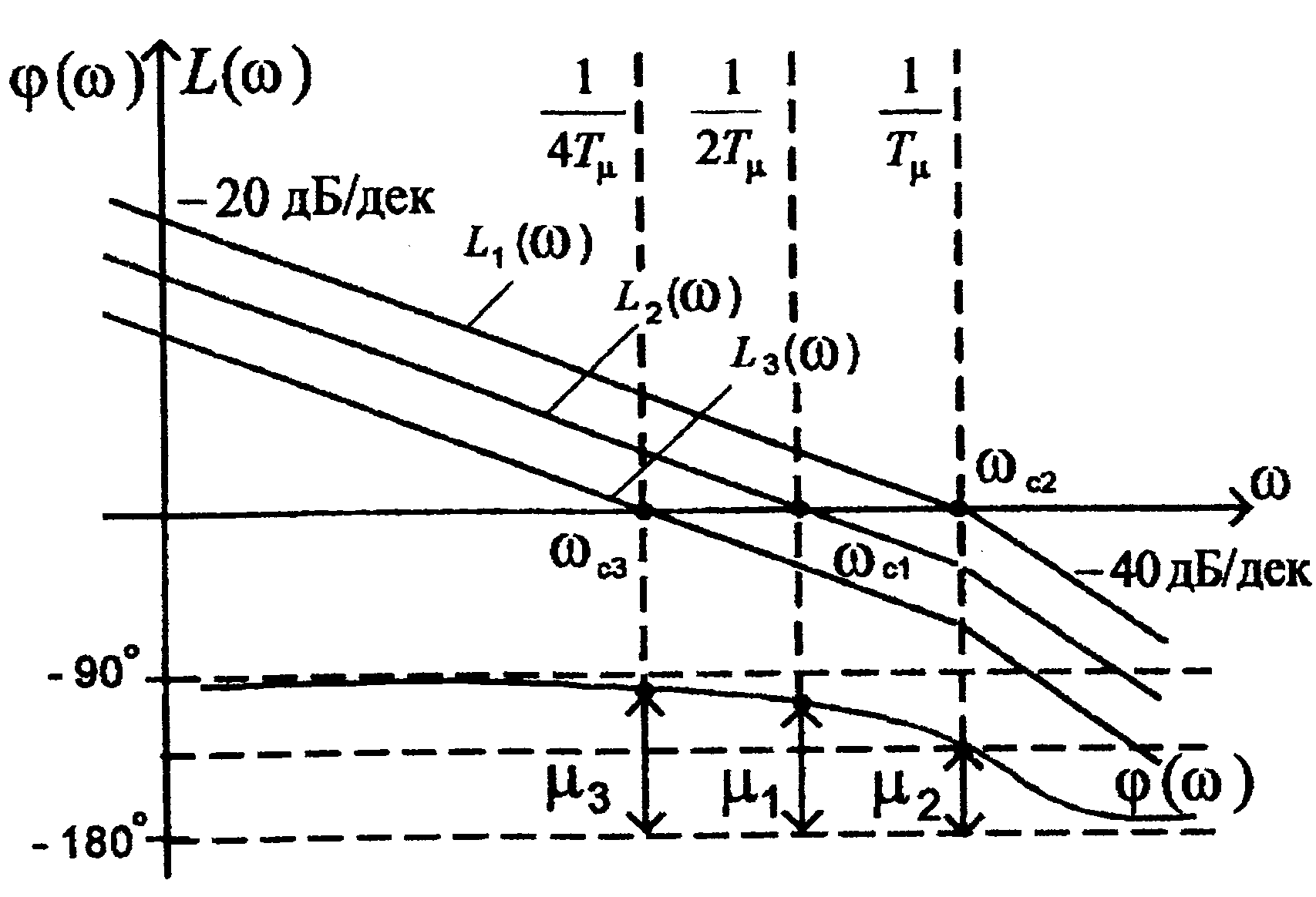
Рис.
8.24. ЛАЧХ и ЛФЧХ внутреннего контура при
изменении величины
![]()
Пользуясь частотными методами можно определить запас системы по амплитуде и фазе, а также показатели качества САР.