

Teoria_sistem_i_sistemny_analiz_-_lektsii_1-11
.pdfРис. 4.9: Представление в виде слоев проблемы принятия решения
Слой выбора - нижний слой, самый близкий к управляемому процессу. Задача этого слоя - выбор способа действий m. Принимающий решения элемент (блок) получает данные (информацию) о управляемом процессе и, применяя алгоритм, полученный на верхних слоях, находит нужный способ действия - последовательность управляющих воздействий на управляемый процесс. На приведенном выше рисунке P - выходная функция, G - функция оценки, а выбор действий m основан на применении оценки G к P .
Слой обучения (адаптации) - вышележащий по отношению к рассматриваемому. Задача данного слоя - конкретизировать множество неопределенностей U, с которым имеет дело слой выбора. Множество неопределенностей U рассматривается здесь как множество, включающее в себя все незнание о поведении системы и отражающее все гипотезы о возможных источниках и типах таких неопределенностей. U может быть получено с помощью наблюдений и внешних источников информации. Назначение рассматриваемого слоя - сузить множество неопределенностей U и, таким образом, упростить модель слоя выбора. В случае стационарности системы и среды множество U может быть предельно сужено вплоть до одного элемента, что соответствует идеальному обучению. Однако в общем случае U может включать не только существующие, но и предполагаемые системой принятия решения неопределенности, и в случае необ-
41
ходимости U может быть полностью изменено, расширено, в том числе за счет изменения ранее принятой базисной гипотезы.
Слой самоорганизации - третий, верхний слой. На этом слое выбираются структура, функции и стратегии, используемые на нижележащих слоях, таким образом, чтобы по возможности приблизиться к отображению цели, которая обычно задается в форме вербального описания. Если цель не достигается, могут быть изменены функции P и G на первом слое или стратегия обучения на втором.
Примером приложения слоевого представления являются также многоуровневые экономико-математические модели планирования отраслями и народным хозяйством в командно-административной экономике СССР.
4.4.3Многоэшелонное иерархическое представление
Понятие многоэшелонной иерархической структуры вводится по Месаревичу следующим образом: система представляется в виде относительно независимых, взаимодействующих между собой подсистем, при этом некоторые (или все) подсистемы имеют права принятия решений, а иерархическое расположение подсистем определяется тем, что некоторые из них находятся под влиянием или упрвляются вышестояющими. На следующем рисунке представлено графическое представление такой ирерахической структуры; уровень такой иерархии называют эшелоном.
42

Рис. 4.10: Графическое представление многоэшелонной структуры
Основной отличительной особенностью многоэшелонной структуры является предоставление подсистемам всех уровней определенной свободы в выборе их собственных решений; при этом эти решения могут быть (но не обязательно) не теми решениями, которые выбрал бы вышестоящий уровень. Предоставление свободы действий в принятии решений компонентам всех эшелонов иерархической структуры повышает эффективность ее функционирования; подсистемам предоставляется определенная свобода и в выборе целей. Таким образом, многоэшелонные структуры являются также многоцелевыми.
Естественно, что цели различных подсистем одного уровня могут противоречить (конфликтовать) друг с другом; разрешение конфликтов же осуществляется путем вмешательства вышестояющего эшелона. В связи с этим в теории многоуровневых систем Месаревича рекомендуется, чтобы в процессе принятия решения подсистемы не всегда старались бы создавать конфликтные ситуации, а вступали бы в коалиции. В связи с этим, теорию многоуровневых систем называют также иногда теорией
координации.
Отношения, подобные принятым в эшелонированных структурах, ре-
43
ализуются, например, в практике управления в форме так называемых холдинговых структур или холдингов. Правила взаимоотношений между организациями, входящими в холдинг, оговариваются в соответствующих договорах, нормативно-правовых и нормативно-технических документах.
44

Лекция 5
Модели представления систем
5.1 Управляемые системы
Управляемыми системами называются такие системы, в которых доступно управление со стороны человека (ЛПР) для достижения системной цели. В контексте управляемых систем всегда встает вопрос проблемы принятия решения - выборе оптимальной траектории системы для достижения поставленной цели.
5.1.1Проблемы принятия решения
В контексте проблемы принятия решения системная задача представляет собой способ реализации (достижения) цели1, исходя из имеющихся средств (структурных и функциональных ресурсов системы) и критериев2 достижения цели.
Для решения системной задачи необходимо определить функционал взаимосвязи цели со средствами ее достижения3. При этом при постановке задачи учитываются обычно не только обязательные (основные) требования, отражаемые с помощью критериев достижения цели, но и дополнительные требования - системные или целевые ограничения. В этом случае для решения задачи формируют комплекс соотношений, включающий наряду с основным функционалом, связывающим цель со средствами, соотношения-неравенства, отражающие ограничения. Приведем пример подобного описания:
1Выбор траектории системы.
2Совокупности требований для достижения цели. Примером критерия является осуществление достижения цели за фиксированное время.
3Выражение, связывающее цель со средствами ее достижения с помощью вводимых критериев оценки достижимости цели и оценки средств.
45

•Цель - достичь пункта назначения.
•Критерий - не более, чем за время T часов.
•Средства - дорога длиной L километров; типы транспорта с различными скоростями v1; v2; : : : vn.
•Ограничения - среднее и максимальное время ожидания d1; d2; : : : dn различных типов транспорта в различное время суток.
•Функционал - t = f(L; v; d).
Для выбора оптимальной системной траектории, например, согласно теории оптимизации и математического программирования4, целевой функционал устремляют к минимуму или максимуму.
Целевой функционал, соответствующий заданной проблемной ситуации - системной задачи совместно с заданными средствами, критериями и ограничениями - может быть непосредственно сформирован, если известен закон, позволяющий связать цель со средствами. Если закон неизвестен - стараются определить закономерности на основе статистических исследований, или исходя из наиболее часто встречающихся функциональных зависимостей. Если и это не удается сделать, то выбирают или разрабатывают теорию, в которой содержится ряд утверждений и правил, позволяющих сформулировать концепцию и конструировать на ее основе процесс принятия решения. Если и теории не существует, то выдвигается определенная гипотеза и на ее основе создаются имитационные модели, с помощью которых исследуются возможные варианты решения (см. рис. ниже).
4В указанной трактовке постановка задачи впервые была предложена Л.В. Канторовичем.
46
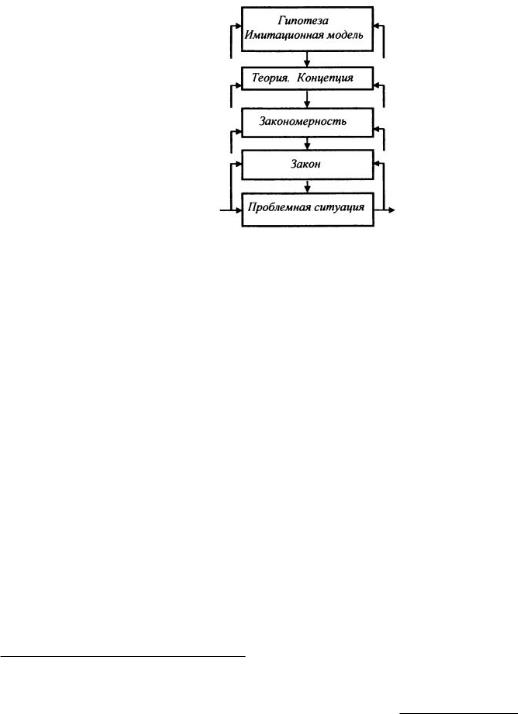
Рис. 5.1: Этапность формирования целевого функционала
При этом в общем виде для ситуаций различной сложности модель формирования критериальной функции в виде атомарных составляющих возможно составить, воспользовавшись моделю представления слоев М.Месаровича. Вообще в настоящее время сформировалось два основных подхода к отображению систем, первоначально предложенные для формирования структур целей:
1 Подход сверху вниз: данный подход рассматривается в методах структуризации (декомпозиции), обозначается также целевым или
целенаправленным подходом, либо аксиологическим5;
2Подход снизу вверх: подход, называемый также морфологическим (в широком смысле); данный подход рассматривается также в рамках лингвистической, тезаурусной, терминальной моделей. Указанный подход называют также каузальным6 В рамках подхода
5Аксиологическое представление системы - отображение системы в терминах целей и целевых функционалов. Термин используют в тех случаях, когда необходимо выбрать подход к отображению системы на начальном этапе моделирования и противопоставить это отображение описанию системы в терминах перечисления элементов системы и их непосредственного влияния друг на друга (т.е. каузального представления).
6Каузальное представление системы - описание системы в терминах влияния одних переменных на другие, без употребления понятий цели и средств достижения целей. Термин происходит от понятия cause - причины, т.е. подразумевает причинно-следственные отношения. При каузальном представлении будущее состояние системы определяется предыдущими состояниями и воздействиями среды. Такое представление является развитием отображения системы в виде т.н. пространства состояний, характерного для большинства математических методов моделирования. Применяют каузальное представление в случае предварительного описания системы, когда цель не может быть сразу сформулирована и для отображения системы или проблемной ситуации не может быть применено аксиологическое представление.
47

снизу вверх могут быть применены также не только комбинаторные приемы (морфологическая, лингвистическая и пр. модели), но и бехивиористский7 метод представления, вариант которого при автоматизации моделирования поведения объектов достаточно часто называют процессным.
На практике обычно данные подходы сочетают. Кроме вышеприведенных, разрабатывают также специальные подходы к моделированию си-
стем: информационный, кибернетический, когнитивный, ситуационный, структурно-лингвистический, постепенной формализации модели при-
нятия решения и пр.
В зависимости от текущих возможностей и потребностей по формализации системной проблемы, методы моделирования делятся на два существенных по объему класса - методы, направленные на активизацию интуиции и опыта специалистов (МАИС)8, оперирующих качественными оценками и методы формального представления систем (МФПС)9, использующими количественные показатели.
7Основанный на исследовании поведения систем и их составляющих.
8Иногда называющиеся качественными методами.
9Иногда называющиеся количественными или формальными методами.
48
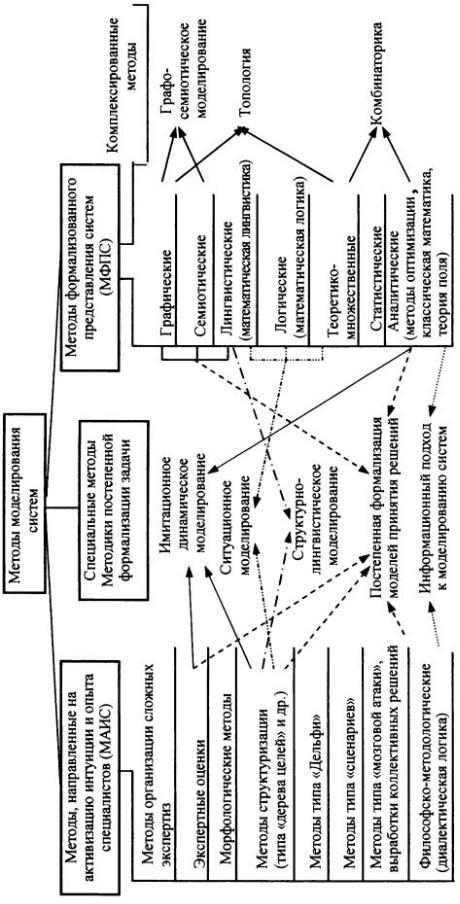
Рис. 5.2: Методы моделирования систем
49

В представленной классификации в группе МАИС методы расположены снизу вверх примерно в порядке возрастания возможностей формализации, а в группе МФПС - снизу вверх возрастает внимание к содержательной составляющей проблемы и появляется все больше средств для ее содержательного анализа. Указанная классификация методов моделирования совпадает с классификацией методов системного анализа и подробно рассматривается в последующих лекциях. В то же время существует ряд специальных методов моделирования, базирующихся на сочетании средств МАИС и МФПС. Рассмотрим наиболее популярные из них:
•Метод имитационного динамического моделирования10 - данный метод предложен Дж. Форрестером (США) в 50-х гг. XXго века; указанный метод позволяет использовать удобный для человека структурный язык, помогающий выражать реальные взаимосвязи, отображающие в системе замкнутые контуры управления и аналитические представления11, позволяющие реализовать формальное исследование полученных моделей на ЭВМ12.
•Метод ситуационного моделирования - метод был предложен Д.А. Поспеловым и реализован Ю.И. Клыковым и Л.С. Загадской. Данное направление базируется на отображении в памяти ЭВМ и анализе проблемных ситуаций с применением специализированного языка, разрабатываемого с помощью выразительных средств теории множеств, математической логики и теории языков.
•Структурно-лингвистическое моделирование - указанный подход возник в 70-е гг. XX-го века в инженерной практике и основан на использовании для реализации идей комбинаторики структурных представлений разного рода с одной стороны, и средств математической лингвистики - с другой. В расширенном понимании подхода в качестве языковых (лингвистических) средств используются и другие методы дискретной математики (языки, основанные на теоретико-множественных представлениях, на использовании средств математической логики, семиотики).
10Англ. эквивалент - System Dynamics Simulation Modeling.
11Линейные конечно-разностные уравнения.
12В т.ч. для этих целей был разработан специальный язык программирования DYNAMO.
50