

Система автоматического управления Митенков Ф.М., Чирков В.А
..pdfРис. 1.12. Параллельное согласное соединение |
Рис. 1.13. Параллельное встречное соединение |
звеньев. |
звеньев. |
В первом случае имеет место положительная обратная связь, во втором - отрицательная. Переходя от оригиналов в равенствах (1.17) и (1.18) к изображениям соответствующих величин, связанных зависимостью типа (1.12), получим выражение для передаточной функции при параллельном встречном соединении двух звеньев.
(1.19)
Знак минус в знаменателе этого выражения соответствует положительной, а знак плюс - отрицательной обратной связи.
Если известны уравнения всех звеньев линейной системы, т.е. известны их передаточные функции, то можно произвести преобразование структурной схемы по определенным выше правилам.
Рис. 1.14. Эквивалентная одноконтурная схема.
Это соответствует приведению математической модели линейной САУ к одному дифференциальному уравнению. Для большинства систем автоматического регулирования оказывается возможным заменить структурную схему эквивалентной одноконтурной схемой, показанной на рис. 1.14. Здесь Wоб(s) и Wрег(s) - передаточные функции соответственно объекта и регулятора, возму-
20
щающее воздействие, например нагрузка, Wобf(s) - передаточная функция объекта по возмущению.
Линейная модель такой системы выражается уравнением
. (1.20)
Отношение
, |
(1.21) |
где E(s) - изображение сигнала ошибки ε(t), называется передаточной функцией разомкнутой системы. Передаточная функция замкнутой системы определяется выражением
. |
(1.22) |
Аналогичным образом можно определить передаточную функцию замкнутой системы по возмущающему воздействию
, |
(1.23) |
где F(s) - изображение по Лапласу функции f(t).
§1-9. Характеристики качества САУ.
Устойчивость системы является необходимым, но далеко не достаточным условием ее работоспособности. Устойчивая система, например, может не обеспечивать достаточно быстрого затухания переходных процессов (возмущений) или необходимой точности управления.
Поведение системы в установившихся и переходных режимах работа зависит не только от свойств системы, но и от характера внешних воздействий, законы изменения которых могут быть достаточно сложными функциями времени, как правило, неизвестными заранее.
Поэтому при анализе САУ принято рассматривать реакцию системы на сигналы специального типа, в качестве которых выбирают наиболее вероятные или наиболее неблагоприятные для системы законы изменения внешних воздействий. Обычно ограничиваются рассмотрением гармонических сигналов и воздействий типа
21
(1.24)
где An - постоянные, функция единичного скачка
(1.25)
вводится сомножителем в различные законы изменения внешнего воздействия для того, чтобы совместить момент приложения воздействия с началом отсчёта времени. Более сложные сигналы могут быть представлены совокупностью гармонических колебаний или единичных скачков.
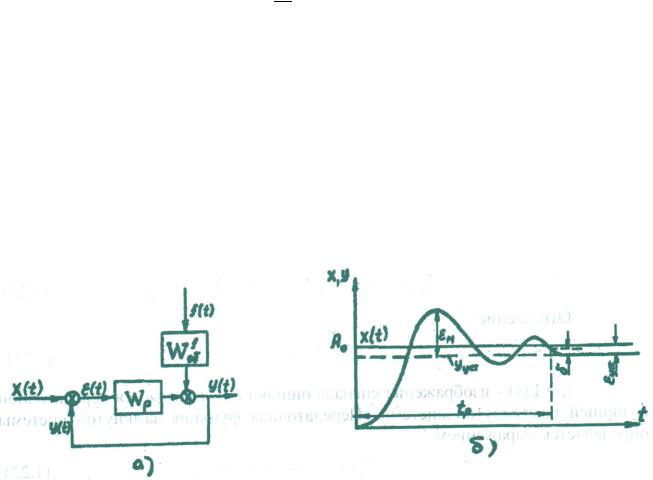
Рис. 1.15. Пример "обработки" входного сигнала замкнутой автоматической системой. а) Структурная схема системы б) Характеристики качества переходного процесса
Комплекс требований, определяющих поведение системы в установившихся и переходных процессах "отработки" заданного внешнего воздействия, характеризует качество САУ. Пригодность системы для каждого конкретного случая определяется на основании некоторых показателей качества, зависящих в общем случае от ошибки управления
(1.26)
Например, характеристикой точности системы является величина ошибки в установившемся режиме
(1.27)
Рассмотрим пример отработки входного сигнала системой, изображенной на рис. 1.15(а). Для этой системы справедливо выражение
22
, |
(1.28) |
||||
из которого следует, что |
|
||||
|
|
|
|
|
(1.29) |
|
|
|
|
|
|
Если возмущающее воздействие постоянно |
, то устано- |
||||
вившаяся ошибка (1.27) называется статической, и с учетом соответствия
|
может быть получена из предельного соотношения |
||||||
|
|
|
|
|
|
|
(1.30) |
|
|
|
|||||
где |
- общий коэффициент усиления разомкнутой системы, |
||||||
|
- коэффициент усиления объекта. |
||||||
|
Величина |
||||||
|
|
|
(1.31) |
||||
|
|
||||||
характеризует статическую ошибку замкнутой системы по входному воздействию. При система называется статической. Величина ошибки может быть уменьшена за счет увеличения коэффициента усиления разомкнутой сис-
темы. При |
, когда знаменатель передаточной функции разомкнутой |
|||
системы имеет хотя бы один нулевой корень, |
, и система называется ас- |
|||
татической по входному воздействию. Величина |
|
|||
|
|
|
|
(1.32) |
|
|
|
|
|
характеризует статическую ошибку системы по возмущению. В общем случае система астатическая по входному воздействию может оказаться статической по
возмущению |
. Полная статическая ошибка замкнутой системы |
|
(1.33) |
определяет статизм или остаточную неравномерность характеристики регулирования, рис. 1.15(б).
Установившуюся ошибку астатической системы можно определить для
23
воздействия типа (1.24) при и т.д. Чем выше значения n, при котором , тем выше порядок астатизма, тем выше точность системы. Однако увеличение астатизма сопровождается уменьшением устойчивости системы. Так система с астатизмом второго порядка является структурно неустойчивой И не
может быть реализована без специальных корректирующих устройств.
В качестве характеристик переходных процессов в системе рассматри-
ваются:
а) время регулирования tp, являющееся показателем быстродействия системы, определяемое интервалом времени, по истечении которого
(1.34)
где δ - заданное положительное число.
б) максимальное перерегулирование εм, определяемое наибольшим отклонением управляемой величины относительно ее установившегося значения, рис. 1.15 (б). Этот показатель используется при оценке необходимого запаса устойчивости системы.
§1-10. Устойчивость линейных систем.
Исследование любой системы автоматического управления включает в частности, анализ ее устойчивости. Как уже отмечалось, система считается устойчивой, если по окончании воздействия она возвращается в равновесное состояние, определяемое статической характеристикой.
Неустойчивая система практически непригодна к использованию.
Пусть математическая модель САУ выражается линейным дифференциальным уравнением с постоянными коэффициентами (1.20). Решение уравнения, определяющее при заданных начальных условиях поведение системы в динамическом и статическом режимах, можно представить суммой двух составляющих
. |
(1.35) |
Решение однородного дифференциального уравнения |
, соответствующее |
свободному движению системы, характеризует переходный режим. Вынужденная составляющая , являющаяся частным решением неоднородного дифференциального уравнения (1.35), соответствует установившемуся режиму системы под действием внешних возмущений. Очевидно, что установившееся состояние возможно, если с течением времени переходная составляющая стремится к нулю, т.е.
24
|
. |
(1.36) |
|
Общее решение однородного уравнения системы определяется выраже- |
|
нием |
|
|
|
|
(1.37) |
где |
- корни характеристического уравнения |
|
|
|
(1.38) |
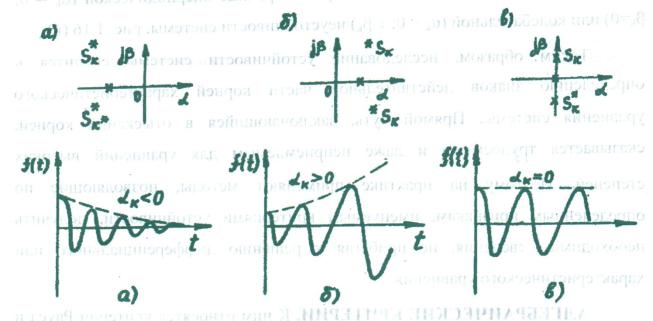
являющиеся полюсами передаточной функции системы. Вид составляющих выражения (1.37) зависит от расположения корней характеристического уравнения системы на комплексной плоскости .
Рис. 1.16. Характер колебаний при различных расположениях корней на комплексной плоскости.
Действительному значению корня |
|
соответствует апериодиче- |
||
ская составляющая |
|
|
|
|
|
|
. |
|
(1.39) |
с ростом t стремящаяся к 0, если |
, или к бесконечности, если |
. Паре |
||
комплексно сопряженных корней |
|
и |
|
соответ- |
ствует колебательная составляющая |
|
|
|
|
|
|
|
|
(1.40) |
Совершенно очевидно, что условие (1.36) |
выполняется, если действи- |
|||
|
25 |
|
|
|
тельные части всех корней отрицательны. Иными словами, система является устойчивой, если все корни характеристического уравнения расположены в левой полуплоскости комплексной переменной. Если хотя бы один корень расположен правее мнимой оси, система является неустойчивой.
Система считается нейтральной или находящейся на границе устойчивости, если хотя бы один корень находится на мнимой оси, а все остальные расположены
левее ее. При этом говорят о границе апериодической |
или ко- |
|
лебательной |
неустойчивости системы, рис. 1.16(в). |
|
Таким образом, исследование устойчивости системы сводится к определению знаков действительной части корней характеристического уравнения системы. Прямой путь, заключающийся в отыскании корней, сказывается трудоемким и даже неприемлемым для уравнений высоких степеней. Поэтому на практике применяют методы, позволяющие по определенным признакам, именуемым критериями устойчивости, получить необходимые сведения, не прибегая к решению дифференциального или характеристического уравнения.
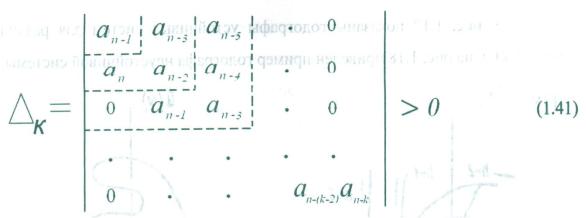
АЛГЕБРАИЧЕСКИЕ КРИТЕРИИ. К ним относятся критерии Рауса и Гурвица, которые отличаются по виду, но приводят к одинаковым алгебраическим неравенствам. Поэтому ограничимся критерием Гурвица, согласно которому система считается устойчивой, если определители, составленные из коэффициентов характеристического уравнения системы (1.42),
для всех |
, и кроме того |
. Из вида определителя следует, что |
. Система находится на границе устойчивости, если |
||
|
|
(1.42) |
что возможно при |
или |
. В первом случае система находится на |
границе апериодической, во втором - колебательной устойчивости. Сложность вычисления определителей возрастает с увеличением порядка уравнения системы, И при использование алгебраических критериев целесообразно только с применением ЭВМ.
ЧАСТОТНЫЕ КРИТЕРИИ. В инженерной практике наибольшее распространение получили частотные критерии устойчивости Михайлова и Найк-
26

виста.
Критерий Михайлова основан на анализе траектории конца вектора (го-
дограф вектора), получаемого из (1.38) заменой |
: |
|
|
, |
(1.43) |
где |
|
|
|
|
(1.44) |
Система считается устойчивой, если при изменении ω от 0 до ∞ вектор поворачивается на угол , т.е. годограф проходит в положительном на-
правлении (против часовой стрелки) последовательно числу квадрантов, равное порядку дифференциального уравнения. САУ.
Из соотношений (1.44) следует, что годограф начинается на действительной оси , и уходит в бесконечность при .
На рис. 1.17 показаны годографы устойчивости систем для различных значений n, на рис. 1.18 приведен пример годографа неустойчивости системы.
Рис. 1.17. Годограф устой- |
Рис. 1.18. Годограф неус- |
Рис. 1.19. Годограф системы, |
чивости системы при раз- |
тойчивости системы. |
находящейся на границе ус- |
личных n. |
|
тойчивости (проходит через |
|
|
начало координат). |
Система находится на границе устойчивости, если годограф начинается из нуля или проходит через него (рис. 1.19).
Рассмотренные выше критерии формулировались по отношению к замкнутой системе.
При анализе систем с обратной связью чаще используют критерий Найквиста, позволяющий судить об устойчивости замкнутой системы по частотному годографу разомкнутой системы. Поскольку последний может быть получен и экспериментально, преимущество данного критерия становится очевидным.
27
Заменив в передаточной функции разомкнутой системы s=jω, получим комплексное выражение
(1.45)
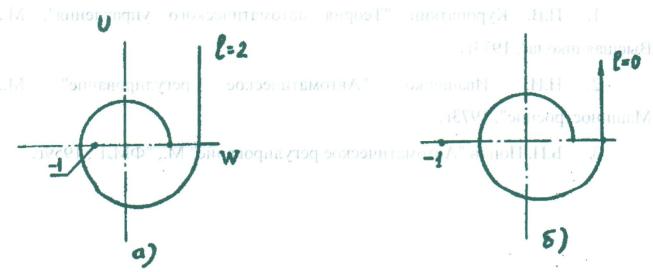
(которое получило название комплексного коэффициента усиления). При изменении ω от 0 до ∞ получим частотный годограф вектора разомкнутой системы. Согласно критерию Найквиста, замкнутая САУ устойчива, если частотный годограф разомкнутой системы охватывает l/2 раз точку (-l, j=0) в положительном направлении, где l - число корней характеристического уравнения разомкнутой системы, лежащих в правой полуплоскости комплексной переменной.
На рис. 1.20(а) показан годограф неустойчивой разомкнутой системы, для которой число корней, лежащих в правой полуплоскости l = 2. Очевидно, что в замкнутом состоянии система устойчива. Для системы устойчивой в разомкнутом состоянии l=0. Следовательно, соответствующая ей замкнутая система будет устойчива, если годограф не охватывает точку (-l, j=0). Поскольку комплексный коэффициент усиления однозначно связан с логарифмическими частотными характеристиками, последние также могут использоваться для определения устойчивости системы на основании критерия Найквиста.
При проектировании систем автоматического управления обычно бывает недостаточно получить ответ на вопрос об устойчивости САУ. Часто возникает необходимость исследовать, какие из параметров системы оказывают наибольшее влияние на устойчивость системы и как следует их изменить, чтобы обеспечить необходимый запас устойчивости. В этих случаях ставится задача определения в пространстве варьируемых параметров области устойчивости, т.е. совокупности значений параметров системы, при которых система устойчива. Для решения этой задачи используются специальные методы.
28
ГЛАВА II
ЯДЕРНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА КАК ОБЪЕКТ УПРАВЛЕНИЯ.
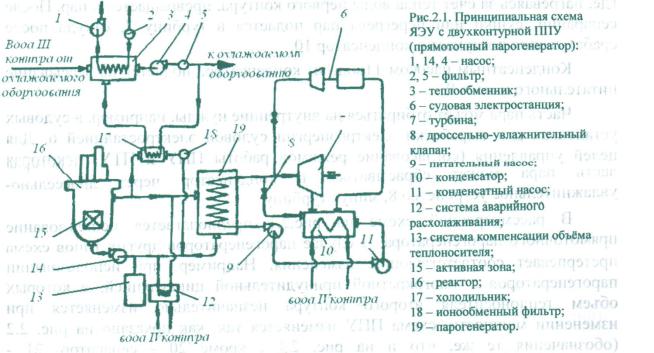
§ 2-1. Принципиальная схема и состав оборудования ЯЭУ.
Ядерная энергетическая установка (ЯЭУ) представляет собой сложный комплексный объект управления, включающий большое число разнообразного оборудования, систем, в которых протекают технологические процессы различной физической природы.
Вобщем случае ЯЭУ включает паропроизводящую установку (ППУ) и паротурбинную установку (ПТУ).
ВППУ энергия деления ядерного топлива преобразуется в тепловую энергию пара при определенных температуре и давлении.
ВПТУ энергия пара срабатывается в турбине, в результате чего либо производится электроэнергия, либо полезная механическая работа. Согласование режимов работы ППУ и ПТУ является одной из задач, возлагаемых на систему управления ЯЭУ.
Ядерные перепроизводящие установки могут быть выполнены по различным схемам одноконтурные и двухконтурные), различаться типом теплоносителя в 1-ом контуре (вода, газ, вода-пар и т.д. )способами разделения теплоносителя и замедлителя, составом оборудования и т.д. Все эти особенности, весьма важные с точки зрения управления ЯЭУ, требуют конкретного изучения и приводят к определенным специфическим решениям задач управления. Однако, при всем этом, сохраняется определенная общность в постановке задач, их составе, методах и способах их решения.
Вреализованных проектах АЭС и ядерных судовых установках к настоящему времени преобладают двухконтурные ППУ, в реакторе которых вода -
29