

Система автоматического управления Митенков Ф.М., Чирков В.А
..pdfИзменение реактивности за счет органа регулирования должно иметь достаточно плавный характер, без мертвых ходов и выбегов. Если конструкция привода такова, что перемещение органа регулирования имеет ступенчатый, шаговый характер, то шаг должен выбираться достаточно малым.
Надежная организация управления реактором практически невозможна без точного знания фактического положения органов регулирования относительно активной зоны. Известные схемные и тем более конструктивные исполнения органов регулирования с приводом весьма разнообразны, но при этом имеют достаточно общую функциональную блок-схему (рис. 6.1). Наиболее часто орган регулирования выполняется в виде стержня, содержащего материалы с большим сечением поглощения нейтронов.
Рис. 6.1. Блок-схема органа регулирования:
1 - орган регулирования; 2 - исполнительный механизм; 3 - двигатель; 4 - система управления привода; 5 - преобразователь сигналов из системы управления; 6 - датчик положения органа регулирования;
7 - указатель положения органа регулирования; 8, 9 - верхний и нижний концевые выключатели.
Изменение реактивности производится путем погружения стержня в активную зону или извлечения из нее. Эффективность такого стержня зависит не только от его геометрии, свойств поглощающего материала и его содержания, но и от физических характеристик самой активной зоны с учетом размещения в ней других органов управления.
В простейшем случае активной зоны однородного состава без торцевых отражателей с синусоидальным распределением потока нейтронов по высоте активной зоны физический вес стержня в зависимости от глубины погружения определяется соотношением:
(6.1)
где H - высота активной зоны;
z - пространственная координата в продольном направлении.
90

Из графической зависимости |
от |
|
(рис. 6.1) следует, что переме- |
|
|||
щение стержня на величину менее |
вблизи торцов активной зоны почти не |
||
приводит' к изменению реактивности (меньше |
|
), в то время, как ана- |
|
логичное перемещение вблизи центрального сечения активной зоны соответствует изменению .
Рис. 6.1. Зависимость "веса" поглощающего стержня от величины погружения в активную зону.
В активных зонах неоднородного состава по оси и в зонах с торцевыми отражателями также существуют концевые эффекты, хотя они и не учитывались при выводе соотношения (6.1).
Учет их при проектировании системы управления реактора необходим. Так, например, в случае реактора, .для которого действительно соотношение (6.1),
должно быть учтено, что перемещение стержня в пределах |
от границ; |
практически не приводит к изменению режима реактора. |
|
С этой целью в приводе органов регулировании предусматриваются концевые выключатели (позиции 8, 9 рис. 6.1), которые выключают двигатель привода и тем самым прекращают перемещение органа регулирования, если последний достигает неэффективной граничной зоны.
Если скорость перемещения стержня , то для быстродействия органа регулирования имеем:
(6.2)
или при выполнении условия (6.1)
. (6.3)
Изменение быстродействия в процессе отработки сигналов достигается за счет изменения скорости перемещения в зависимости от величины (а возможно, и знака) рассогласования заданного и фактического значений регулируемого параметра реактора.
91
§ 6-2. Органы компенсации избыточной реактивности.
Работа энергетического реактора может поддерживаться в течение длительного времени только при наличии запаса реактивности, которая должна вводиться постепенно для компенсации выгорания ядерного топлива.
Более того, даже выход реактора на рабочий режим (по температуре, мощности) невозможен, если не компенсировать уменьшение реактивности, обусловленное температурным и мощностным эффектами, которые в целях безопасности в энергетических реакторах всегда отрицательны.
Поскольку решение задачи непрерывной подзарядки энергетических реакторов еще далеко от инженерного завершения, при проектировании реакторов предусматривается загрузка ядерного топлива из условия обеспечения необходимого запаса избыточной реактивности. Функции компенсации избыточной реактивности и контролируемое высвобождение ее в процессе эксплуатации возлагаются на органы компенсации. Необходимая величина избыточной реактивности является специфичной для каждого реактора и зависит от многих факторов. Однако перечень составляющих, из которых складывается необходимая избыточная реактивность, достаточно универсален.
Вчисло этих составляющих входит:
-температурный эффект реактивности при разогреве реактора от исходной монтажной температуры до рабочей;
-мощностной эффект реактивности при изменении мощности реактора от нулевого до номинального уровня;
-изменение реактивности, обусловленное продуктами деления, при Достаточно длительной работе реактора на номинальной мощности;
-изменение реактивности, обусловленное стационарным отравлением Хе135, при работе реактора на номинальной мощности;
-изменение реактивности, обусловленное нестационарным отравлением, после остановки реактора (йодная яма);
-изменение реактивности, соответствующее выгоранию топлива при проектной энерговыработке;
-оперативный запас реактивности, предусматриваемый на случай компенсации возможных неточностей в определении соответствующих физических характеристик в процессе выгорания.
Втабл. 6.1 приведены для иллюстрации типичные значения отдельных составляющих избыточной реактивности (%) для теплового водо-водяного реактора ВВЭР-440 и быстрого натриевого реактора БН-350.
Таким образом, необходимая избыточная реактивность равна
. (6.4)
92
|
|
Таблица 6.1 |
|
|
|
|
|
Составляющие |
Тип реактора |
||
|
|
||
БН - 350 |
ВВЭР - 440 |
||
|
|||
|
|
|
|
Температурный эффект |
0,3 |
5,2 |
|
|
|
|
|
Мощностной эффект |
1,2 |
1,4 |
|
|
|
|
|
Стационарное отравление |
- |
2,9 |
|
|
|
|
|
Нестационарное отравление |
- |
1,3 |
|
|
|
|
|
Запас реактивности н выгорание |
1,0 |
9,7 |
|
|
|
|
|
Компенсация этой реактивности возлагается на выгорающий поглотитель и подвижные органы компенсации. Поскольку регулирующие воздействия на эффективность выгорающего поглотителя в процессе работы реактора обычно не предусматриваются, то выгорающим поглотителем можно компенсировать только ту часть реактивности, которая непосредственно расходуется на энерговыработку реактора в течение кампании. При этом достигается согласованное изменение реактивности за счет выгорания топлива (уменьшение ) и выгорающего поглотителя (увеличение ). На выгорающий поглотитель можно также частично возложить компенсацию реактивности, расходуемой на шлакование.
Средства компенсации остальных составляющих избыточной реактивности должны быть регулируемыми, так как нормальная эксплуатация реактора без этого невозможна.
К настоящему времени в практике нашли применение разнообразные конструктивные схемы подвижных органов компенсации. Однако все их можно разделить на три группы, если исходить из физических особенностей воздействия на реактор.
Известны следующие способы воздействия, приводящие к изменению реактивности:
—изменение утечки нейтронов из активной зоны (например, посредством изменения свойств отражателя);
—изменение доли нейтронов, поглощаемых в неделящихся материалах активной зоны за счет изменения количества соответствующих материалов в активной зоне;
—изменение доли нейтронов, поглощаемых в делящихся материалах активной зоны, за счет изменения количества, делящегося материала в активной зоне (например, с помощью подвижных топливных каналов).
Наибольшее распространение в энергетических реакторах получил способ компенсации избыточной реактивности путем введения в активную зону поглощающих материалов. Конструктивно это может быть выполнено либо в виде погружных решеток из поглощающего материала той или иной конструктивной формы, либо в виде отдельных герметичных чехлов, размещенных в активной зоне, в которые подается газообразный сильный поглотитель нейтронов (напри-
93
мер BF3), давление которого может изменяться в широких пределах в зависимости от величины компенсируемой реактивности; либо в виде системы, обеспечивающей регулируемое введение и выведение жидкого поглотителя (например, борной кислоты) непосредственно в теплоноситель или замедлитель реактора.
Следует заметить, что с точки зрения управления указанные различия в схемных и конструктивных решениях способов компенсации избыточной реактивности не имеют принципиального значения. В дальнейшем, для определенности, мы будем считать, что органы компенсации выполнены в виде решеток из поглощающего материала.
Ответственной и сложной задачей является определение эффективности органов компенсации. Хотя к настоящему времени и развиты соответствующие расчетные методы, задача проверки эффективности органов компенсации при различных условиях эксплуатации реактора остается актуальной и обязательной.
Сложность такой проверки обусловлена следующими причинами:
—большой величиной компенсируемой избыточной реактивности;
—наличием сильной интерференции между органами компенсации;
—зависимостью эффективности органов компенсации от температуры и от глубины выгорания топлива в активной зоне.
В совокупности эти факторы исключают возможность прямого экспериментального определения физических характеристик органов компенсации в необходимом объеме и с неизбежностью предполагают сочетание косвенных экспериментальных исследований и соответствующих расчетных методов.
Кроме того, в процессе эксплуатации реактора рекомендуется периодически, по мере выгорания топлива, проводить проверку эффективности органов компенсации (например, путем определения изменения реактивности при заданном допустимом изменении положения органов компенсации).
По "физическому весу" органы компенсации значительно превышают β*. Поэтому должны приниматься дополнительные меры для исключения опасности достижения реактором состояния мгновенной критичности из-за
ошибочных перемещений органов компенсации.
Эти меры в зависимости от схемных и конструктивных особенностей могут быть весьма разнообразны:
—быстродействие органов компенсации выбирается значительно меньшим по сравнению с быстродействием органов регулирования, что достигается за счет малой скорости перемещения;
—исключается одновременное перемещение вверх всех органов компенсации, т. е. допускается только поочередное перемещение;
—исключается непрерывное перемещение органов компенсации вверх, т. е. допускается только шаговое перемещение с промежуточной выдержкой;
—исключается одновременное перемещение вверх органов компенсации
иорганов регулирования;
94
— обеспечивается надежный и точный контроль как за перемещением, так и за положением каждого органа компенсации.
Следует заметить, что и в тех случаях, когда конструктивно органы регулирования, органы компенсации и органы аварийной защиты выполнены в виде единого агрегата, большая часть перечисленных выше условий сохраняет свое значение и выполняется.
Блок-схема приводов органов компенсации! ничем существенным не отличается от блок-схемы органов регулирования, хотя к ним предъявляются иные требования по точности индикации перемещения, положения, скорости.
§ 6-3. Органы аварийной защиты реактора.
Органы аварийной защиты предназначены для экстренного "глушения" реактора при возникновении в нем или в энергетической установке в целом ситуации, при конторой "глушение" реактора является необходимым условием для предупреждения или смягчения развития аварийной ситуации.
Требования к органам аварийной защиты относятся в первую очередь к их физической эффективности и времени срабатывания.
Минимально необходимый "вес" определяется тем. что при экстренном глушении необходимо скомпенсировать по меньшей мере мощностной эффект реактивности и некоторую часть температурного эффекта. Таким образом
. |
(6.5) |
Как правило, необходимая эффективность аварийной защиты обеспечивается как за счет эффективности каждого органа так и за счет их числа.
В каждом случае существует некоторое оптимальное соотношение между этими двумя возможностями.
Расчленение органов аварийной защиты целесообразно не только для обеспечения необходимой эффективности, но и для повышения ее надежности. Действительно, если аварийная защита состоит из единого органа, то она не резервируется и ее надежность определяется надежностью этого единственного органа, его привода и звеньев цепи управления этим приводом.
Дополнительное повышение надежности при расчлененных органах аварийной защиты достигается таким увеличением суммарной их эффективности, чтобы при выходе из строя одного из них "вес" оставшихся в работе органов оставался достаточным для надежного "глушения" реактора.
Так же, как органы регулирования и органы компенсации, органы аварийной защиты могут быть выполнены по различной конструктивной схеме. Однако наибольшее распространение получили органы аварийной защиты в виде стержней из сильно поглощающих нейтроны материалов.
Определение их физического веса выполняется теми же расчетными и
95
экспериментальными методами, которые используются применительно к органам регулирования. При этом принимается во внимание, что эффективность органов аварийной защиты может в сильной степени зависеть от взаимною расположения органов аварийной защиты, органов компенсации и органов регулирования.
Другой важной характеристикой органов аварийной защиты с их приводами является время срабатывания, под которым обычно понимают время с момента появления аварийного сигнала до полного срабатывания органов аварийной защиты (например, полного погружения поглощающих стержней в активную зону). В случае поглощающих стержней весь интервал времени срабатывания можно разделить на время запаздывания и время погружения.
Для времени запаздывания можно записать
,
где - время прохождения аварийного сигнала от соответствующего датчика до приводов органов аварийной защиты;
-время срабатывания приводов;
-время прохода стержней от своего исходного положения до верхней границы активной зоны.
Несмотря на то, что время запаздывания мало , в ряде аварийных режимов оно может весьма существенно влиять на минимальные значения запасов по лимитирующим параметрам активной зоны. Это объясняется тем, что для некоторых процессов в реакторе и соответствующих аварийных режимов определяющим является время жизни нейтронов деления. Для этих режимов запаздывание, исчисляемое десятыми долями секунды, уже не может считаться малым.
Скорость погружения стержней аварийной защиты переменная и зависит от конструкции привода и самого стержня. Для каждого конкретного случая скорость и полное время погружения определяются расчетным путем и проверяются непосредственными измерениями. В конструкции приводов для сокращения времени погружения стержней предусматривают средства по увеличению их начальной скорости при срабатывании (например, разгонные пружины, импульсы давления в пневмоприводах и др.).
Эффективность стержней аварийной защиты зависит от глубины погру-
жения так же, как и эффективность регулирующих стержней. |
|
||||
Если |
и |
- известные функции, то для изменения реактивности |
|||
к моменту времени |
после срабатывания аварийной защиты получим |
|
|||
где |
|
|
|
, |
(6.6) |
|
|
||||
|
|
|
|
|
|
|
|
96 |
|
|
|
;
t - не превышает времени полного погружения стержней.
Следует также иметь в виду, что при некоторых аварийных ситуациях в первые десятки секунд происходит значительное снижение, либо повышение температуры в реакторе.
Это может заметно поправить величину отрицательной реактивности, введенной в реактор согласно (6.6), поскольку изменение температуры может заметно сказаться на эффективности поглощающих стержней.
Блок-схема привода органов аварийной защиты включает все основные элементы, которые приведены на рис. 6.1 для органов регулирования. Дополнительным является разгонный элемент в исполнительном механизме, который обеспечивает первоначальный разгон органу аварийной защиты. Необходимо отметить, что в настоящее время широкое распространение получает принцип дублирования аварийной защиты, который предполагает введение дополнительных органов другой физической природы. Например, наряду с поглощающими стержнями, на случай несрабатывания предусматривается введение жидких поглотителей. Такое решение было реализовано еще на первой установке атомного ледокола "Ленин". В качестве жидкого поглотителя там использовалась соль кадмия.
97
ГЛАВА VII
ИЗМЕРЕНИЕ КОНТРОЛИРУЕМЫХ И РЕГУЛИРУЕМЫХ ПАРАМЕТРОВ
§ 7-1. Объем измерений и требования к средствам измерений.
Для обеспечения нормальной работы энергетического реактора необходимо оперативное измерение некоторого минимума параметров, характеризующих достаточно полно режим работы и его изменение. Кроме того, при промышленной эксплуатации энергетических реакторов накапливается полезная информация, не имеющая непосредственного отношения к процессу управления. Всю совокупность изменяемых параметров можно разделить на три группы. К первой относятся параметры, результаты измерения которых в виде соответствующих сигналов поступают непосредственно в систему автоматического регулирования.
Ко второй относятся параметры, отклонение которых от установленных значений за пределы разрешенных диапазонов свидетельствует о наступлении аварийной ситуации, поэтому недопустимое отклонение каждого такого параметра является сигналом для системы аварийной защиты реактора.
К третьей группе относятся параметры, знание которых необходимо или полезно для уточнения условий эксплуатации реактора и установки в целом, либо позволяет получить данные для анализа и обобщения результатов эксплуатации и выработки рекомендаций, направленных на дальнейшее совершенствование схем и конструктивных решений.
Следует иметь в виду, что универсального перечня измеряемых параметров и тем более их распределения по группам применительно даже к однотипным реакторам не существует, так как в каждом конкретном случае этот перечень отражает схемные и конструктивные особенности как самого реактора, так и установки в целом.
Следует стремиться свести к минимуму объем измерений, поскольку, вообще говоря, обеспечение каждого замера конструктивно усложняет установку, ее эксплуатацию и снижает ресурсную надежность.
Приводимый ниже перечень измеряемых параметров с распределением по группам следует рассматривать как иллюстративный.
Параметры I группы:
1)мощность реактора;
2)период реактора;
3)расход теплоносителя;
4)давление теплоносителя;
5)температура теплоносителя на входе и выходе реактора.
Параметры второй группы в основном совпадают с параметрами первой группы и могут быть дополнены параметрами II контура и других вспомога-
98
тельных систем, если это необходимо. Заметим, что сигналы аварийной защиты формируются при отклонениях параметров, значительно превышающих те, при которых подаются сигналы в системы управления.
Параметры III группы;
1)температура теплоносителя на выходе из отдельных каналов реактора;
2)температура отдельных конструктивных элементов реактора;
3)распределение потока нейтронов по объему активной зоны и реактора в целом;
4)химический состав теплоносителя;
5)газовая и осколочная активность теплоносителя;
6)число изменений режима.
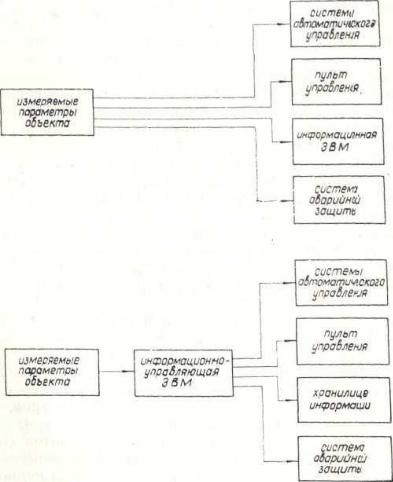
Рис. 7.1. Схемы использования информации: с информационно-управляющей ЭВМ (б) и без нее (а)
Информация, полученная в результате измерений параметров, распределяется между потребителями (рис. 7.1, а). Часть полученной информации может одновременно направляться нескольким адресатам. Например, сигналы, поступающие в систему автоматического регулирования, одновременно могут поступать на пульт управления для информации оператора или в информационную ЭВМ и т. д.
99