

Система автоматического управления Митенков Ф.М., Чирков В.А
..pdfуправления можно выделить следующие группы [1], [2]:
задающие элементы, обеспечивающие возможность установления (задания) значения управляемой переменной; в качестве задающих элементов в различных системах управления и регулирования используются пружинные элементы, эталонные сопротивления, источники эталонного напряжения, уровень жидкости, опорные полупроводниковые диоды и т.д.;
чувствительные элементы, регистрирующие изменение выходной переменной; в качестве чувствительных элементов в различных системах используются термопары, термометры сопротивления, датчики давления различного типа, расходомеры, ионизационные камеры, счетчики и т.д.;
сравнивающие устройства, обеспечивающие сравнение заданного и фактического значения управляемой переменной; рассогласование этих значений, получающееся на выходе сравнивающего устройства является полезным сигналом (сигнал рассогласования); используемые сравнивающие устройства весьма разнообразны; наиболее часто сравнение проводится в виде электрического напряжения, тока;
усилительные элементы предназначены для необходимого усиления сигнала рассогласования на выходе сравнивающего устройства и других элементов при прохождении сигнала по контуру;
исполнительные элементы служат для создания управляющего воздействия на объект управления; в тех случаях, когда исполнительные элементы предназначены для механического перемещения органа регулирования, то их называют сервомоторами;
преобразовательные элементы используются в тех случаях, когда на выходе того или иного элемента требуется получить величину, отличающуюся от входной либо качественно (напр., температура, давление, расход на выходе, напряжение на входе), либо количественно;
корректирующие и стабилизирующие устройства предназначены для воздействия на динамические качества отдельных элементов или системы в целом.
Влитературе установились более или менее общие названия и обозначения основных элементов систем и выполняемых ими функций.
Ниже будут использованы следующие обозначения: О - объект управления; ЧЭ - чувствительный элемент;
СУ - сравнивающее устройство; УЭ - усилительный элемент; ИЭ - исполнительный элемент; РО - регулирующий орган; ОС - обратная связь.
На рис. 1.5 и 1.6 даны примеры простейших функциональных схем. На
10
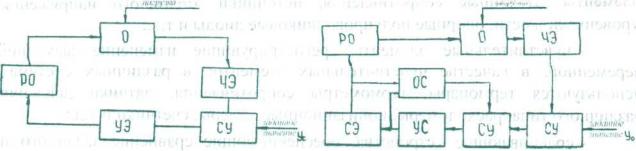
рис. 1.5 изображена функциональная схема прямого регулирования, когда сигнал рассогласования (отклонения), получаемый на выходе сравнивающего устройства после предварительного усиления или без него подается на регулирующий орган и приводит его в действие.
Рис. 1.5. Функциональная система прямого |
Рис. 1.6. Функциональная система непрямого |
регулирования. |
регулирования. |
В случае т.н. непрямого регулирования усиленный сигнал рассогласования подается на силовой элемент, который и приводит в действие регулирующий орган.
Для схем непрямого регулирования характерно наличие дополнительных обратных связей, обусловленных наличием силового элемента (см. рис. 1.6).
§1-4. Классификация автоматических систем.
Воснову классификации автоматических систем управления и регулирования можно положить различные признаки в зависимости от того, какие из них
втом или ином случае имеют определяющее значение.
Из числа таких признаков наибольший интерес представляют:
a) закон изменения управляемой переменной; по этому признаку разли-
чают:
стабилизирующие автоматические системы, для которых заданное значение выходной переменной остается постоянным;
программные автоматические системы, в которых значение выходной переменной изменяется по определенной, заранее сформированной программе;
следящие автоматические системы, у которых заданное значение выходной переменной зависит от значения входной переменной, которое
заранее неизвестно;
b)характер действующих в автоматической системе сигналов: непрерывные, дискретные;
c)вид используемой для целей управления энергий, по этому признаку автоматические системы управления подразделяются на механические, электромеханические, пневматические, гидравлические, электронные. Встречаются системы смешанного типа;
d)вид уравнений автоматической системы. (Различают линейные и не-
11
линейные автоматические системы);
e)стабильность параметров автоматической системы; автоматические системы управления с постоянными параметрами (объекта и других элементов системы) называются детерминированными или стационарными; системы с переменными параметрами - нестационарными;
f)число управляемых переменных; автоматические системы управления с одной управляемой переменной называются одномерными, а с двумя и более - многомерными;
g)способность приспособления к изменению внешних условий. По этому признаку различают обыкновенные системы автоматического управления и самонастраивающиеся. Самонастраивающиеся автоматические системы обладают способностью приспосабливаться к переменным внешним условиям и совершенствоваться в процессе работы. Такие системы необходимы в тех случаях, когда особенности условий работы объекта недостаточно известны и в течение эксплуатации могут изменяться, при этом характер изменения заранее неизвестен.
§ 1-5. Этапы создания автоматических систем.
При всем разнообразии автоматических систем управления можно выделить основные общие этапы, через которые проходят их разработчики. Прежде всего требуется тщательное изучение управляемого объекта, т.е. исследование его физических характеристик, условий работы, возможно изменения характеристик в процессе эксплуатации, влияния внешних воздействий, определение соответствующих численных значений параметров. Исходя из целевого назначения объекта управления, его характеристик и внешних условий эксплуатации формулируется техническое задание на разработку системы автоматического управления с отражением всех специальных требований, предъявляемых к системе.
Весьма ответственным является этап разработки алгоритма управления объекта, поскольку стремление к максимальной простоте алгоритма может в сильной степени ограничиваться неоптимальностью выбранных схемных и конструктивных решений объекта с точки зрения его управляемости. Поэтому очень важно, чтобы разработчик объекта, обычно опережающий по времени разработчиков других элементов системы автоматического управления, в необходимом объеме учитывал при выборе схемных и конструктивных решений основные требования, вытекающие из задач управления. Следующим этапом является выбор функциональной схемы и разработка принципиальной схемы системы автоматического управления.
В соответствии с разработанной схемой выбираются и рассчитываются элементы системы. Затем проводится динамическое исследование системы с целью проверки и определения степени ее устойчивости, качества переходных процессов.
12
Улучшение динамических свойств системы достигается за счет ввода в
систему корректирующих устройств, параметры которых подбираются на основе соответствующих динамических исследований.
Все более или менее сложные автоматические системы проходят этап исследования на моделирующих (цифровых или аналоговых) установках, которые позволяют внести необходимые уточнения и поправки в схему и параметры отдельных элементов.
После этого становится возможным рабочее проектирование системы, изготовление и монтаж.
Весьма ответственным этапом являются пуско-наладочные работы в рабочих условиях со штатным объектом.
Во многих случаях на этом этапе так же вносятся некоторые уточнения. Последующая опытная эксплуатация позволяет проверить в эксплуатации эффективность системы и выработать рекомендации по ее совершенствованию.
Решение перечисленных выше задач требует в каждом конкретном случае, с одной стороны, конкретных знаний различных областей науки и техники, а с другой стороны, опирается на некоторые общие методы решения, не зависящие от специфических особенностей физических процессов и составляющих содержание теории автоматического управления. Поэтому к разработчикам систем автоматического управления предъявляются серьезные требования и в части конкретных знаний различных областей техники и свободного владения сложным математическим аппаратом.
§ 1-6. Исследование автоматических систем.
Исследование автоматических систем управления и регулирования имеет целью определение статических и динамических характеристик системы. В общем случае возможно и теоретическое, и экспериментальное исследование систем. Практически и тот и другой методы необходимы при создании любой более или менее сложной системы.
Теоретические исследования проводятся по существу на всех этапах создания автоматических систем, при этом особо важное значение имеют исследования на стадии разработок, поскольку их результаты определяют выбор основных параметров систем, изменение которых на дальнейших этапах создания либо невозможно, либо связано с большими дорогостоящими (материальными и временными) затратами. Чтобы выполнить теоретическое исследование автоматической системы необходимо сформулировать так называемую математическую модель объекта управления, автоматического регулятора и других элементов, замыкающих систему.
Математическая модель системы представляет совокупность дифференциальных уравнений, описывающих протекание процессов во времени во всех
13
элементах системы.
Для написания таких уравнений необходимо знание принципа действии, конструкции, характеристик рабочих процессов во всех функциональных элементах системы и их взаимосвязь. Следует заметить, что на различных этапах разработки системы используемые математические модели могут существенно различаться не только из-за уточнения отдельных параметров системы, что всегда имеет место, но и из-за различных целей исследования на этих этапах.
Например, на первом этапе разработки автоматической системы, когда обычно известны конструктивные и другие основные характеристики объекта управления и ставится цель обосновать требования к регулятору, включая исполнительные механизмы органов регулирования, в математической модели системы достаточно подробно будет описан объект управления, а описание регулятора будет упрощенным.
Это позволяет исследовать особенности динамического поведения объекта и сформулировать в первом приближении требовании к характеристикам регулятора и другим замыкающим элементам системы.
Напротив, на стадии разработки рабочей документации опытного образна системы формулируется такая математическая модель системы, которая позволяет
Система дифференциальных уравнений, составляющих модель исследуемой системы, может быть приведена к одному дифференциальному уравнению (в общем случае нелинейному), которое получило название проследить изменение соответствующих переменных во всех интересующих элементах и определить с практически необходимой точностью характеристики переходных процессов в объекте управления. Из сказанного ясно, что формулирование математической модели является весьма ответственной задачей.
уравнения динамики системы. Оно записывается обычно в виде:
F1 (у, у(1),..., y(n)) = F2 (Х, Х(1), ..., z, z(1),...).
Нелинейность уравнения динамики отражает наличие в системе нелинейных элементов.
|
Если нелинейных элементов в системе не содержится, то уравнение ди- |
намики является линейным и записывается в виде: |
|
|
, |
где |
в общем случае являются функциями времени t. |
Перечень физических величин, определяющих коэффициенты дифференциальных уравнений, зависит от физической природы процессов, протекающих в объекте управления и других элементах системы. Очень часто в качестве таких величин выступают масса, объем, электрическая емкость, индуктивность, момент инерции и т.д.
Исследование нелинейных систем дифференциальных уравнений (или
14
нелинейных уравнений динамики) в общем случае представляет математически очень сложную задачу и в настоящее время универсального метода не имеется. Напротив, исследование линейных систем не составляет принципиальных трудностей. Поэтому в инженерной практике очень широкое распространение получил метод линеаризации, позволяющий при исследовании заменить нелинейную систему линейной.
В основе этого метода лежит предположение И. А. Вышнеградского, что в течение всего процесса регулирования отклонения всех изменяющихся переменных от установившихся значений относительно малы. Для получения линеаризованных уравнений необходимо в исходных нелинейных уравнениях - произвести замену:
здесь индекс "0" соответствует установившимся значениям, а - отклонению от установившегося значения (для простоты в дальнейшем будем счи-
тать Z = 0, т.е. z = Z0 = const);
произвести разложение соответствующих функции в окрестности установившихся значений X0, Y0, Z0;
учесть уравнения статики, связывающие значения X0, Y0, Z0;
использовать предположение Вышнеградского и пренебречь членами, содержащими отклонения 2-го порядка и более.
В тех случаях, когда предположение И. А. Вышнеградского не выполняется и следовательно, нелинейность существенна и при малых отклонениях, линеаризация недопустима.
§1-7. Характеристики звеньев линейных (линеаризованных) систем.
Зависимости между выходными и входными переменными, а так же внешними воздействиями как в отдельных звеньях, так и в системе в целом описываются соответствующими дифференциальными уравнениями или системами дифференциальных уравнений. В случае линейных (линеаризованных) звеньев с постоянными параметрами, систем это будут линейные дифференциальные уравнения с постоянными коэффициентами. При исследовании таких систем (как теоретически, так и экспериментально) оказывается очень удобным описывать связь между выходными и входными переменными с помощью т.н. передаточных функций и частотных характеристик.
Передаточная функция.
В общем случае уравнение линейных звеньев или систем при отсутствии внешних воздействий имеет вид:
15

(1.1)
Будем считать, что уравнение записано в отклонениях от исходного равновесного состояния (X0, Y0 при t=0).
Применяя преобразование Лапласа к уравнению и вводя обозначения10
получим (случай нулевых начальных условий):
(1.2)
где |
, |
Из (1.2) имеем |
|
(1.3)
Передаточной функцией называется выражение |
|
, определяющее, как это |
|
следует из (3), отношение изображения выходной переменной Y(s) к изображение входной X(s). Необходимо подчеркнуть, что передаточная функция зависит только от физических характеристик звена (системы) и характеризует реакцию звена (системы) на изменение входной переменной.
Частотные характеристики.
Из теории линейных дифференциальных уравнений с постоянными коэффициентами следует, что если входная переменная изменяется по гармоническому закону
(1.4)
то выходная переменная также изменяется по гармоническому закону той же частоты
(1.5)
Здесь A, B - амплитуды; φ1, φ2.
После подстановки (1.4) и (1.5) в (1.1) будем иметь:
(1.6)
где D(jω) и K(jω) получаются из (1.2) заменой s=jω.
16
Выражение |
|
|
|
(1.7) |
|
|
называется комплексным коэффициентом усиления звена и поскольку после
разделения действительной и мнимой части для |
|
можно записать: |
||||||||
|
||||||||||
то очевидно |
|
|
|
|
(1.8) |
|||||
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.9) |
||||
|
|
|
|
|
|
|
|
(1.10) |
||
|
|
|
|
|
|
|
||||
|
Зависимость |
называется амплитудно-частотной характеристи- |
||||||||
кой, а |
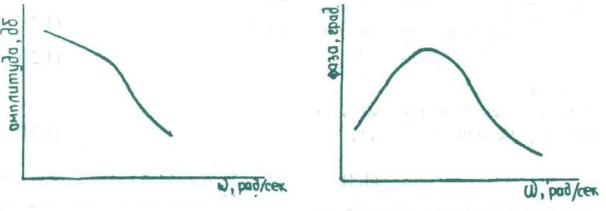
- фазо-частотной характеристикой (см. рис. 1.7). |
|||||||||
Рис. 1.7. Амплитудно-частотная и фазо-частотная характеристики
Амплитудно-частотная характеристика определяет усиление в звене (системе) амплитуды входного сигнала в зависимости от частоты, а фа- зо-частотная - изменение фазы (сдвиг) на выходе звена (системы) в зависимости от частоты изменения входногосигнала.
Существует так же понятие амплитудно-фазовой характеристики, т.е. |
в |
|
зависимости |
. |
|
Амплитудно-фазовая характеристика может быть |
|
|
представлена как геометрическое место точек конца вектора комплексного коэффициента усиления при изменении частоты от 0 до (см. рис.1.8).
17

Рис. 1.8. Амплитудно-фазовая характеристика (годограф).
Другое название этой характеристики - частотный годограф. Амплитудно- и фазо-чистотные характеристики изображаются в лога-
рифмическом масштабе. Используемые при этом единицы измерений декада, децибел, градус (радиан).
Декадой называется интервал частот, соответствующий изменению частоты в 10 раз. Децибел равен 1/10 бела. В свою очередь бел определяется как единица измерения логарифмического отношения квадратов амплитуд (энергий) выходного и входного сигналов. Следовательно, .
Очевидно, что и декада, и децибел являются условными единицами измерения, поскольку они безразмерны по определению. Фаза измеряется либо в градусах, либо в радианах.
§1-8. Структурные схемы линейных систем автоматического управления.
Математическая модель САУ может быть изображена графически в виде структурной схемы, где каждой операции преобразования сигнала соответствует определенное звено. На структурной схеме уравнение звена записывается не в дифференциальной форме, а посредством передаточной функции,
рис. 1.9.
Такая форма записи означает, что изображения по Лапласу переменных y(t) и x(t) связаны зависимостью
(1.12)
Операции суммирования и вычитания на структурной схеме обозначаются кружком с соответствующим знаком, рис. 1.10.
Рис.1.9. Изображение управления |
Рис.1.10. Операция суммирования и вычитания |
звена на структурной схеме |
на структурной схеме |
18
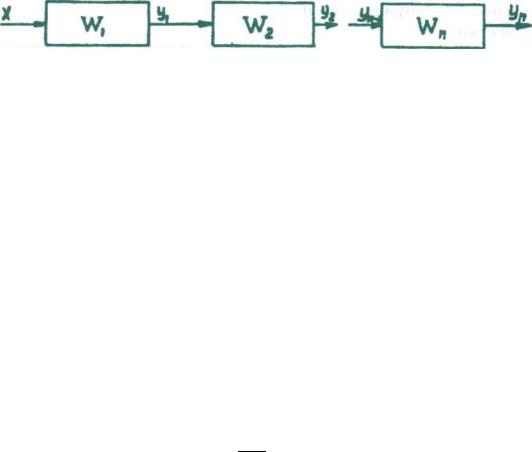
Структурные схемы имеют большое значение при исследовании систем, поскольку САУ можно представить в виде совокупности простейших звеньев, соединенных соответствующим образом. Различают следующие соединения звеньев: последовательное, параллельное согласное и параллельное встречное.
При последовательном соединении, рис. 1.11, выходной сигнал одного звена является входным сигналом следующего звена. Считая, что для каждого звена справедливо выражение (1.12), получим:
(1.13)
Рис.1.11. Последовательное соединение звеньев.
Следовательно, передаточная функция системы последовательно соединенных звеньев
|
|
|
|
(1.14) |
|
|
|
|
|
При параллельном согласном соединении, рис. 1.12, на входы всех |
||||
звеньев подается одна и та же величина |
|
, а выходные ве- |
||
личины суммируются |
|
|
||
|
|
|
(1.15) |
|
Переходя в последнем выражении от оригиналов к изображениям для передаточной функции при параллельном согласном соединении звеньев
(1.16)
Параллельное встречное соединение двух звеньев показано на рис. 1.13. Выходной сигнал звена прямой связи
(1.17)
подается на вход звена обратной связи, выход которого может либо суммироваться с сигналом, либо вычитаться из него
(1.18)
19