

105
Для определения же еще и высоты антенны ПИ относительно поверхности Земли – необходимы измерения Dпсд до четырех КА.
Вычислительное устройство ПИ будет "прибавлять" или "вычитать" Dпсд из измеренных при t1 , t2, t3 и t4 до тех пор, пока рассчитанные псевдодальности Dпсд не
образуют пересечение четырех сфер (изоповерхностей) в одной точке. В этом случае определяется место судна, погрешность шкалы времени ПИ относительно шкалы времени всей системы GPS и каждого КА. Для этого в ПИ имеется 4 канала
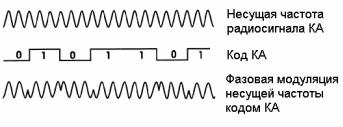
приема и первичной обработки радиосигнала от КА (в некоторых ПИ 6-8 каналов). Излучаемые КА кодированные радиосигналы модулированы по фазе. Принцип
фазовой модуляции показан на рис.2.7.
Нахождение псевдорасстояний (или их разности) осуществляется
при импульсном излучении сигналов спутниками. Однако, для
повышения помехозащищенности системы, в действующих СРНС используют псевдошумовую
модуляцию излучаемых сигналов.
Рис.2.7.Принцип фазовой модуляции Это дает возможность всем ИСЗ работать на одной и той же несущей частоте (на волне около 19 см и/или 24.4 см), но со своим законом
модуляции. Применение псевдошумовой модуляции с длительным периодом
неповторяемости сигнала (до нескольких недель) создает условия для построения
СРНС, определение места по которой невозможно, если пользователю не известен код модуляции [2].
Наряду с этим в системе может быть применен и более короткий по времени код модуляции, позволяющий определяться всем желающим пользователям, но с меньшей точностью.
Лекция №24
2.3. Структура навигационных радиосигналов НКА GPS
Передатчики НКА GPS излучают для определения места, два непрерывных
модулированных радиосигнала на частотах L1- 1575,42 МГц (λ=19 см) и L2 - 1227,6
МГц (λ =24,4 см). (С 2005 г. НКА излучают еще и третью частоту L5 - 1176,45 МГц, предназначенную для специального применения) [9,15,18,19].
Все передаваемые НКА радиосигналы порождены одним стандартом частоты – 10,23 МГц и когерентно связаны между собой. (L1- 1575,42 МГц является 154
гармоникой частоты 10,23 МГц, а L2 - 1227,6 МГц – соответственно 120 гармоникой). (Применение двух несущих частот позволяет исправить погрешность GPS,
известную как ионосферная задержка).
Все спутники GPS передают радиосигналы на этих же частотах -L1 и L2, которые манипулированы по фазе (см. рис.2.7) по закону псевдослучайных
двоичных цифровых последовательностей - цифровыми кодами – двумя
дальномерными кодами и информационным сообщением.
Для того, чтобы приемники различали НКА – применяют для каждого НКА свой цифровой шифр – код, свойственный только данному номеру НКА. Это
позволяет ПИ судна "узнать" номер НКА при измерении расстояния до него – то есть при измерении навигационного параметра.
106
Информационное сообщение (последовательность) содержит информацию об эфемеридах НКА, системном времени, поведении "часов" НКА, статусе сообщения и
др.
Дальномерная последовательность предназначена для определения в
приемоиндикаторе потребителя псевдодальности и других параметров, которые позволяют определить координаты объекта.
Существует два основных дальномерных кода:
-дальномерный псевдослучайный С/А-код – (Clear (Coarse)/Acquisition) - код свободного доступа;
-дальномерный псевдослучайный Р-код (P – Precise(Protected) ) – защищенный код. Использование соответствующих кодов образует такие возможные режимы
работы аппаратуры потребителей (АП) [9,13,19]:
SPS (Standart Positioning Service) для C/A-кода - обеспечивает гражданских потребителей.
PPS (Precise Positioning Service) для P-кода - обеспечивает доступ для санкционированных потребителей.
Как дальномерные, так и информационные коды формируются в НКА с
помощью чередующихся прямоугольных импульсов (рис.2.9), так называемой М- последовательности, в которых число 0 и 1 (число символов) может отличаться не более чем на один символ, что придает сигналу, при кажущейся хаотичности чередования символов, свойства
широкополосного шума.
Рис.2.9. Однако для различных кодов их длительность различная.
У информационного кода длительность импульса равна 20 мс, а их последовательность формируется с частотой 50 бит/с.
Импульсы С/А-кода формируются с частотой 1,023 МГц, а P-кода – с частотой 10,23 МГц. В этом случае длительность одного импульса (бита) С/А-кода будет
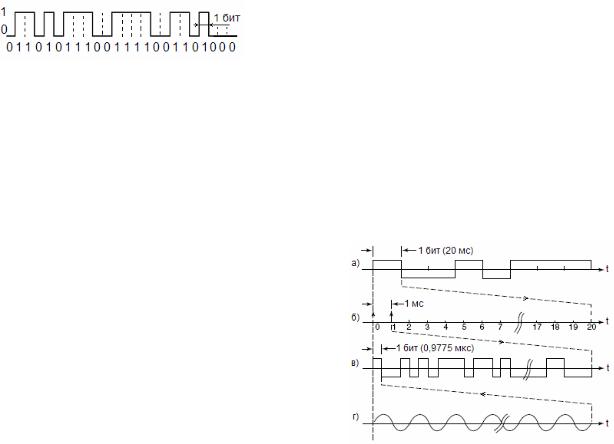
равна: τбит=1/f =1/1,023 МГц= 0,9775 мкс, а для P-кода - один бит равен 0,09775 мкс. На рис.2.10 показан пример сложения С/А кода с информационными
(навигационными данными) кодами и модуляция С/А кодом несущей частоты L1.
Из рисунка видно, что информационный код, формирующийся с частотой 50 бит/с,
обладает длительностью одного бита 20 мс (рис.2.10,а). В 1 мс этого бита (см. рис.2.10,б) «вкладывается» дальномерный С/А код (см.
рис.2.10, в), при этом количество двоичных
псевдослучайных импульсов (бит) 0 или 1 составит: 1мс:0,9775 мкс=1023 . Отсюда также
следует, что длительность С/А кода равна 1000
мкс.
Как было сказано выше, дальномерными |
|
кодами модулируются несущие частоты L1 и |
|
L2. В приведенном примере – в 1бите С/А кода, |
Рис.2.10. |
который модулирует частоту L1 1575,42 МГц,
вкладывается без изменения фазы: 1575,42.106 (Гц) х 0,9775. 10-6 (с) =1540
колебаний (волн) (рис.2.10,г). А «длина» бита для L1 равна: 3.108(м/с) х 0,9775. 10-6 (с) = 293,25 метров.
Аналогично рассуждая - для дальномерного Р-кода, у которого длительность
бита псевдослучайной последовательности равна 0,09775 мкс, количество двоичных

107
псевдослучайных импульсов (бит) 0 или 1 составит: 1мс:0,09775 мкс=10230, при этом «длина» бита Р-кода для L1 равна: 3.108(м/с) х 0,09775. 10-6 (с) =29,325 метров.
Также, как и для С/А кода, длительность Р-кода равна 1000 мкс, а длительность 1 бита информационного (навигационного) кода равна 20 мс (см. рис.2.10,а).
Из приведенных выше расчетов видно, что потенциально точность определения места с Р-кодом в десть раз
выше , чем с С/А кодом.
На рис.2.11.показан процесс
модуляции несущих частот L1 и L2 кодовыми сигналами.
Излучаемый сигнал L1 состоит из
двух компонентов, которые находятся Рис.2.11. Модуляция несущих частот по фазе в квадратуре друг к другу
кодированными сигналами (сдвинуты на π/2) для удобства их разделения. Первая компонента представляет собой
радиосигнал, который модулирован двумя двоичными последовательностями (дальномерным псевдослучайным Р-кодом) и информационной
последовательностью передачи данных, складывающимися по модулю 2 (см.
рис.2.11).
Вторая компонента – радиосигналтакже модулируется двумя двоичными последовательностями (дальномерный псевдослучайный С/А-код и
информационная последовательность), складывающимися по модулю 2.
Сигнал L2 модулирован только P - кодом и обеспечивает доступ для санкционированных потребителей.
Это позволяет им исключить погрешности влияния ионосферы (т.к. используются сигналы на двух частотах). Соотношение погрешностей определения
выходных параметров по C/A-коду и P-коду 10:1. Т.е., использование P-кода
позволяет выполнить измерения с погрешностями, значительно меньшими, чем с C/A-кодом.
Основным навигационным дальномерным псевдослучайным кодом является
точный Р-код (P – Precise).
В распоряжении мирового сообщества находится открытый псевдослучайный С/А код, иногда переводимый как „легкий (грубый) захват”, который сначала
использовался для первого вхождения в режим слежения с последующим переходом к использованию Р-кода.
В целом этот шифр-код содержит 15345000 единичных элементов. Из них
подобраны 1025, которые присваиваются в разном сочетании 24-м НКА на орбитах
(то есть здесь используется кодовый принцип разделения сигналов). Через семь суток шифр-код заменяется (с субботы на воскресенье).
Р-код представляет собой двоичную псевдослучайную последовательность
длиной в 7 суток, с тактовой частотой 10,23 МГц. Длительность закрытого Р(Y)-код составляет 267 суток, формируется, в соответствии со специальными закрытыми документами (следует отметить, что, кроме вышеописанных, существует также Y- код, который образуется путем шифрования точного кода. Очевидно, что применение алгоритмов шифрования является прерогативой специальных ведомств).
2.3.1.Навигационное сообщение
Внавигационном сообщении информационной последовательности GPS содержится информация об эфемеридах НКА, позволяющих рассчитать их координаты и составляющие скорости, альманах созвездия НКА, частотно-