


103
собственному генератору, периодически синхронизируемому от наземной станции. Принятый на судне сигнал позволяет определить дальность до ИСЗ при наличии в
судовом приемоиндикаторе своего стабильного эталонного генератора.
При любом из этих двух способов спутник должен передавать свои траекторные
данные на момент установления связи между ним и судном.
Активный способ для определения места судна в настоящее время в спутниковых РНС не применяется, но не исключено его применение в некоторых
других системах.
Пассивный способ до середины 70-х годов не мог обеспечить достаточной
точности из-за отсутствия компактных и недорогих генераторов эталонной частоты (времени) с необходимой стабильностью. Появление эталонов частоты на атомной основе (рубидиевых, цезиевых и водородных) дало возможность использовать
дальномерный пассивный (так называемый псевдодальномерный) метод в СРНС с круговыми орбитами высотой около 20 тыс. км («Навстар», «Глонасс»).
Нахождение в зоне видимости одновременно не менее трех-четырех ИСЗ создает условия для определения трех координат (широты - φ, долготы - λ, высоты - Н) при наличии у пользователя обычного кварцевого эталонного
генератора со значительно меньшей стабильностью по сравнению с установленными на ИСЗ.
Для использования этого метода на орбиты выводится достаточно большое количество спутников таким образом, чтобы четыре из наблюдаемых ИСЗ находились в положениях, которые обеспечивают наилучшую геометрию для
определения.
2.2.6. Пассивный псевдодальномерный способ определения места
Измерение псевдодальности от космического аппарата (КА) до аппаратуры потребителя (АП) происходит в пассивном режиме, поскольку радиосигнал распространяется от спутника к приемоиндикатору (ПИ) в одном направлении [12].
Если бы был известен момент излучения сигнала со спутника, то расстояние от
него к ПИ можно определить согласно формуле:
D = ct, |
(8) |
где t - время движения радиосигнала от КА к ПИ.
Радиоволна распространяется со скоростью приблизительно равной скорости
света в вакууме с = 3·108 м/с.
Если КА относительно ПИ будет в зените, например на высоте 20180 км, то радиосигналу потребуется время t ≈ 0,06 с, чтобы пройти это расстояние. Поэтому
необходимо определять время с высокой точностью, для чего устанавливаются
"высокоточные часы" на КА и ПИ.
В современных СРНС «Навстар», «Глонасс» применен совершенный способ
|
измерения |
времени, основанный |
||
|
||||
|
на атомном стандарте частоты, |
|||
|
который |
обеспечивает |
ход |
|
|
бортовых часов КА с точностью 10- |
|||
|
9с. Главной трудностью при |
|||
|
измерении |
времени прохождения |
||
|
радиосигнала |
явилось |
точное |
|
|
выделение в ПИ момента |
|
||
|
|
|||
Рис.2.4. Принцип генерирования копии одинакового вида кода КА в ПИ |
времени, в который |
|||
радиоимпульс излучен с КА.
104
Для этого разработчики СРНС обратились к разумной идее: синхронизировать часы КА и ПИ так, чтобы они генерировали абсолютно идентичные
последовательности сигналов - коды (см. рис.2.4).
От КА приемоиндикатор принимается радиосигнал - код "излученный" и
проверяется, как давно ПИ генерировал такой же код "опорный" – копию кода КА. Выделенный таким образом сдвиг одинакового вида кода в сигнале КА и
сгенерированного в ПИ будет соответствовать времени t прохождения
радиосигналом расстояния от КА к приемоиндикатору.
Формирование таким образом "опорных" и "излучаемых" сигналов достигаются
наличием в ПИ и КА высокостабильных генераторов - "часов".
Время распространения сигнала от передатчика КА к ПИ представляет собой задержку ∆t, на которую необходимо сдвинуть "опорный" сигнал, выработанный в
ПИ, чтобы он с точностью до фазы совпал с принятым (излученным с КА), при этом время задержки будет точно соответствовать времени распространения сигнала от
излучателя к приемнику (см. рис.2.4). Данный "код" выглядит как ряд случайных импульсов - «псевдослучайных последовательностей». (Этим импульсным кодом модулируют несущую частоту сигнала, излучаемого спутником). Таким образом, на
КА и в ПИ вырабатываются две абсолютно идентичные последовательности сигналов - коды, которые поступают в ПИ на смеситель, где и определяется временной сдвиг - т.е. время движения сигнала t от КА к ПИ.
Математически эти коды формируются из двух функций полиномовтипа[4,9]:
δ1 (x) =1 + x3 + x10 +...(x = t),
δ2 (x) =1 + x2 + x3 + x6 + x8 + x10 +...(x = t + δt).
Если их сложить в двоичном коде, сдвигая одну функцию относительно другой, получают 1025 различных вариантов. Из них выбирают 37, которые позволяют выделить совершенно некоррелированные сигналы. Полученная последовательность дает возможность распознавать номер КА и определить время
прохождения радиосигнала от КА к приемоиндикатору, т.е. измерить навигационный
параметр D.
|
Dпсд – псевдодальность (квазидальность - как бы дальность): |
||
или |
Dпсд = c(t +δt); |
(9) |
|
Dпсд = D +с δt, |
|||
|
|
||
где D - истинное расстояние (см. уравнение 8); δt - погрешность в определении t.
Таким образом, ПИ измеряет время, за которое радиосигнал прошел от КА к
приемоиндикатору. Если бы ПИ имел сверхточные часы (как на КА), точно
синхронизированные с часами КА, то трех
измерений Dпсд от трех КА было бы достаточно
для определения места судна в трехмерной
системе координат (хс, ус, zc) . Но точность часов
ПИ значительно ниже - они (ПИ) стоили бы очень дорого. Тогда для определения места судна и погрешности времени δt используют измерения
до четырех КА.
Большую часть δt составляет погрешность из-
за рассогласование шкалы времени ПИ относительно шкалы времени КА (за счет
значительной неточности шкалы времени в ПИ).
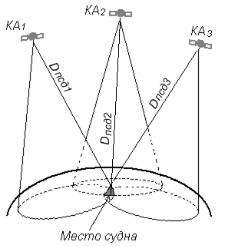
При измерении Dпсд до трех КА на
поверхности Земли место судна (широта - φ и долгота – λ) находится в пересечении трех
Рис.2.6 изолиний - окружностей, внутри треугольника погрешностей (см. рис.2.6).