

Глазунов Д.В. управление техническими системами автомобиля
.pdfЗАЗОРОВ В ТОРМОЗНЫХ МЕХАНИЗМАХ
С увеличением зазоров между фрикционной накладкой и барабаном (диском) тормозных механизмов снижается быстродействие и синхронность работы тормозной системы, уменьшается эффективность и бортовая равномерность торможения, повышается расход воздуха и жидкости. Для обеспечения оптимальных зазоров необходимо постоянно по мере изнашивания накладок корректировать зазоры. Ручное регулирование зазоров является трудоемкой операцией, в особенности на тяжелых грузовых автомобилях. Другим недостатком ручной регулировки является неизбежное увеличение зазоров в промежутках времени между регулировками. Чтобы поддерживать зазор оптимальным, нужна частая и точная регулировка его, т.е. необходимо применение автоматических регуляторов зазоров.
Можно выделить два типа регуляторов: 1) регуляторы, чувствительные к помехам и способные корректировать зазор только при максимальном давлении в тормозных камерах или цилиндрах, т.е. только при экстренном торможении; 2) инвариантные регуляторы, способные корректировать зазор при любом рабочем давлении, т.е. как при рабочих, так и при экстренных торможениях.
Регуляторы первого типа применяются в тормозных механизмах с высокой степенью стабильности упругих характеристик материалов. В противном случае применяются регуляторы второго типа, у которых заданный зазор поддерживается независимо от возмущающих воздействий.
Объектом управления регулятора зазора между фрикционными элементами (барабаном и накладкой) тормозных механизмов является тормозной механизм, а именно барабан, установленный на колесе. Устройство измерения воспринимает перемещение колодок. Полученное значение сравнивается с заданным, устанавливаемым с помощью задающего устройства. Сигнал рассогласования подается на исполнительный механизм (кулачок, клин, поршневой механизм), который воздействует на регулирующий орган – накладку (колодку, прижимной диск).
15.5. РЕГУЛИРОВАНИЕ ТОРМОЗНЫХ СИЛ
Торможение автомобиля должно осуществляться с максимальной эффективностью при одновременном сохранении его управляемости и устойчивости. При торможении происходит перераспределение нормальных реакций, действующих на передний и задний мосты, которое зависит от замедления и высоты центра масс автомобиля. По мере роста замедления реакции на передний мост увеличиваются, а на задний –
241
уменьшаются. Наибольшая эффективность торможения достигается при полном использовании сцепного веса автомобиля.
Распределение тормозных сил в реальной тормозной системе определяется свойствами тормозных механизмов и законом изменения давления рабочей среды в контурах привода переднего P1и заднего Р2мостов. Для оптимального регулирования тормозных сил давления рабочей среды Р1и Р2должны изменяться в зависимости от коэффициента сцепления j(дорожных условий) и нагрузки на мосты автомобиля В.
Применяют три вида регулирования распределения тормозных сил по мостам: постоянное (нерегулируемое); программное; регулируемое по отклонению (с обратной связью). Наибольшее распространение получили программные регуляторы тормозных сил (РТС).
При постоянном распределении тормозных сил Р1= Р2полное использование сцепного веса автомобиля обеспечивается лишь при определенных дорожных условиях, когда j=j0. При j<j0первыми блокируются колеса переднего моста и автомобиль теряет управляемость, а при j>j0– колеса заднего моста и автомобиль теряет устойчивость.
Тормозная система, оборудованная РТС, является разомкнутой системой автоматического регулирования по возмущению. Водитель, воздействуя на тормозную педаль, регулирует замедление автомобиля, которое определяется суммарной тормозной силой, а распределение тормозных сил между мостами автомобиля производится системой регулирования. Точность регулирования зависит от способности датчика точно передать информацию о возмущающем воздействии;
По принципу действия устройства управления все РТС, применяемые в тормозных системах, подразделяются на два вида:
двухпозиционные ограничители давления (отсекатели), которые в диапазоне от точки включения до Рi поддерживают давление в заданном контуре привода на постоянном уровне с помощью специального клапана с уравновешивающей пружиной. При этом используются ограничители без коррекции и с коррекцией точки включения. В последнем случае коррекция осуществляется в зависимости от нагрузки на задний мост и вместо уравновешивающей пружины используется упругий чувствительный элемент датчика;
аналоговые регуляторы давления (компенсаторы), в которых после точки включения изменяется закон регулирования.
РТС особенно эффективны на автомобилях, имеющих короткую базу с высоким расположением центра масс или большую разность статических и динамических нормальных нагрузок. Однако с помощью РТС не устраняется блокировка колес при торможении. Кроме того, характеристики регуляторов зависят от точности их установки, степени
242
изнашиваемости элементов подвески в процессе эксплуатации, стабильности тормозного механизма. Поэтому РТС лишь в ограниченной степени решают задачу регулирования процесса торможения. Более полно эту задачу решают системы автоматического регулирования тормозных сил (автоматические антиблокировочные тормозные системы).
15.6. АВТОМАТИЗАЦИЯ ТОРМОЗНЫХ СИСТЕМ
Одна из концепций развития тормозных систем – встраивание средств автоматизации в готовые системы. Это позволяет сократить затраты на внедрение автоматических систем, но не обеспечивает достижения системой современного уровня развития техники.
При автоматизации системы, как правило, должна предусматриваться возможность работы и в режиме непосредственного управления. Для этого в систему устанавливаются переключатели режимов работы. Такие переключатели «водитель – автомат» позволяют при необходимости или при выходе из строя средств автоматизации переходить на ручное управление. Переключение режимов может осуществляться и автоматически. Для этой цели широко используют электромагнитные клапаны (ЭМК). На грузовых автомобилях используются командные системы управления с пневматическим приводом тормозных механизмов.
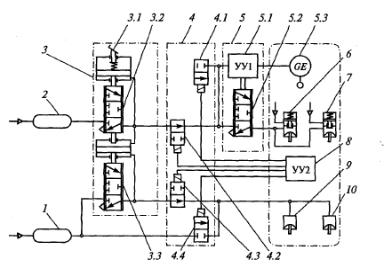
Принципиальная схема автоматизированной системы управления торможением колес с пневматическим приводом представлена на рис. 15.5. Приведенная система управления торможением автомобиля имеет три уровня управления: 1) непосредственный от тормозного крана; 2) от локального регулятора тормозных сил; 3) от центрального устройства управления.
Для повышения надежности работы в системе используются два контура с раздельным питанием от двух источников 1, 2. Из ресиверов 1, 2 воздух подается в двухсекционный тормозной кран 3. При нажатии водителем на педаль 3.1 срабатывает верхняя секция 3.2 крана, через которую сжатый воздух поступает в контур задних тормозных механизмов. Повышение давления в верхней секции 3.2 крана заставляет сработать нижнюю секцию 3.3, которая подает сжатый воздух в контур передних тормозных механизмов. В переднем контуре воздух в тормозные камеры 9, 10 поступает через переключатель вида работы 4. В задний контур воздух подается в поршневые тормозные камеры 6, 7через переключатель 4 и клапан 5.2 регулятора тормозных сил 5. Регулятор служит для автоматического регулирования силы торможения в зависимости от нагрузки на заднюю ось. Нагрузка приводит к изменению положения ку-
243
зова или рамы автомобиля относительно заднего моста. Это перемещение воспринимается упругим чувствительным элементом датчика 5.3 (GE).Один конец упругого чувствительного элемента связан с поршнем ограничителя, а второй – с задним мостом. По сигналу с датчика устройство управления 5.1 (УУ1) управляет клапаном 5.2, внося коррекцию в закон управления тормозными силами, что приводит к повышению эффективности торможения. В автоматическом режиме управление осуществляется от устройства управления 8 (УУ2). Изменение режима работы производится с помощью переключателя 4, содержащего четыре электромагнитных клапана, из которых 4.2 и 4.3 — нормально открыты, 4.1 и 4.4 – нормально закрыты. При торможении по командам от УУ2 ЭМК 4.2 и 4.4 закрываются, отсоединяя тормозной кран от контуров питания, и открываются ЭМК 4.1 и 4.3, пропуская сжатый воздух из ресиверов 1, 2 в контуры питания, минуя тормозной кран 3. При автоматическом управлении используется широтно-импульсная модуляция и давление в тормозных камерах регулируется путем изменения длительности включения клапанов. По окончании торможения ЭМК 4.1 и 4.4 закрываются, а ЭМК 4.2 и 4.3 открываются и воздух из контуров питания сбрасывается в атмосферу через тормозной кран 3.
Рис. 15.5. Принципиальная схема автоматизированной системы управления торможением колес с пневмоприводом
244
Такая система соответствует концепции минимального изменения конструкции действующих систем торможения. Однако для ее реализации требуются ЭМК с большим проходным сечением, которые имеют небольшое быстродействие и требуют больших токов для переключения.
15.7. АНТИБЛОКИРОВОЧНЫЕ СИСТЕМЫ
Влияние проскальзывания на свойства АТС
Все рассмотренные ранее устройства, используемые для управления тормозными механизмами АТС, не препятствуют блокированию колес при торможении и разгоне.
Блокирование колес при торможении и разгоне нежелательно по следующим причинам: нарушается устойчивость автомобиля или автопоезда при торможении и буксовании; частое блокирование колес и, следовательно, движение автомобиля «юзом» приводит к прогрессирующему изнашиванию шин и снижению срока их службы; снижается эффективность торможения.
Из теории автомобиля известно, что при торможении колеса к нему подводится тормозной момент Мτ, препятствующий вращению колеса и создающий в контакте колеса с дорогой тормозную силу Вτ= Мτ/rд. При условии Bτ –J ε/rд>Bjнаступает блокировка колеса и оно начинает скользить (J– момент инерции колеса; ε – угловое замедление колеса, rд– динамический радиус колеса; Bj– сила сцепления колеса с опорной поверхностью).
Сцепление колеса с дорогой зависит от состояния дороги, характеристик шин, скорости движения автомобиля, угла поворота колес, вертикальной нагрузки и горизонтальной реакции дороги. Сила сцепления колеса с поверхностью характеризуется коэффициентом сцепления jx в продольном направлении, который определяется выражением
jx = Вг/Вв,
где Вг– горизонтальная реакция дороги; Вв– вертикальная нагрузка. Противодействие боковым силам определяется коэффициентом
сцепления в поперечном направлении jy. Он также зависит от многих возмущающих воздействий и определяется выражением
jу = Вб/Вв,
где Вб – поперечная реакция дороги при воздействии боковых сил. Сцепление шин с дорогой в поперечном направлении обеспе-
чивает устойчивость и управляемость автомобиля.
245
При торможении автомобиля возникает проскальзывание колес
Sп=Va – V k,
где Va– скорость автомобиля; Vk = ωкrд – линейная скорость колеса; ωк – угловая скорость колеса.
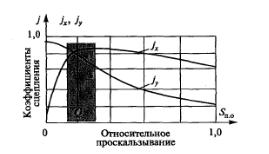
Проскальзывание влияет на силы сцепления колеса с дорогой. Типовая диаграмма, показывающая зависимость коэффициентов сцепления jxи jyот относительного проскальзывания Sп.р(диаграмма j – Sn.o), представлена на рис. 15.6. Относительное проскальзывание находится из выражения
Sn.o=(Va – V k)/ Va.
Из диаграммы видно, что для достижения минимальной длины тормозного пути необходимо поддерживать проскальзывание колеса соответствующим максимальному значению, а наибольшая величина боковой силы реализуется при свободно катящемся колесе. Торможение в состоянии юза, т.е. когда линейная скорость колеса равна нулю и проскальзывание равно единице, приводит к увеличению длины тормозного пути и снижению устойчивости и управляемости. Особенно опасно блокирование колес задней оси тягача при незаблокированных колесах передней оси, так как это может сопровождаться «складыванием» автопоезда. Проскальзывание колес в продольном направлении, при котором коэффициент сцепления j наибольший, называется критическим Sкр. Коэффициент сцепления jxимеет высокое значение лишь в узком диапазоне Q, вблизи Sкр, при этом jyеще сохраняет достаточно большую величину.
Рис. 15.6. Диаграмма j –S n.o
Для обеспечения оптимального сочетания устойчивости и тормозной эффективности автомобиля вне зависимости от условий торможения применяются антиблокировочные системы торможения (АБС, в латинской транскрипции ABS). Задачей АБС является удержание тор-
246

мозящего колеса в зоне оптимального относительного проскальзывания (Sn.o= 0,1 ...0,25), при котором еще не наступает блокирование колес. АБС относятся к системам активной безопасности АТС.
Давление воздуха в тормозной камере, задаваемое водителем при торможении, обеспечивает перемещение тормозного механизма, который создает тормозящее усилие на колесе. Тормозной момент, создаваемый тормозящим усилием, пропорционален тормозящей силе, возникающей в зоне контакта шины с дорогой. Тормозящая сила уравновешивает силу сцепления, создающую тормозной момент, и колесо вращается с некоторым проскальзыванием. Повышение давления воздуха увеличивает тормозной момент, а также проскальзывание и тормозную силу, и замедление автомобиля возрастает. Это происходит только до тех пор, пока не достигается максимум коэффициента сцепления. Дальнейший рост давления воздуха и тормозного момента будет сопровождаться уменьшением коэффициента сцепления шины с дорогой, т.е. уменьшением тормозной силы. Произойдет быстрое блокирование колес. АБС обеспечивает автоматическое поддержание проскальзывания колес в области Q(см. рис. 15.6), т.е. там, где реализуется максимальное замедление автомобиля, а величина боковой силы хоть и не максимальная, но еще гораздо больше, чем при юзе. Ширина области Qявляется показателем качества регулирования АБС: чем эта область уже, тем выше качество.
К основным показателям тормозной системы с антиблокировочным управлением можно отнести:
тормозной путь; оптимальное сцепление колеса с дорожным покрытием;
управляемость и устойчивость при торможении; адаптацию к изменению внешних условий; электромагнитную помехоустойчивость.
Как и в любой автоматической системе, в АБС должна быть предусмотрена возможность проверки работы системы в ручном режиме. Для этого система должна быть дополнена средствами диагностики и сигнализации состояния АБС. В случае необходимости или при отказе АБС управление процессом торможения должно осуществляться водителем как в обычной системе.
Колесо как объект управления показано на рис. 15.7.
247
Рис. 15.7. Колесо как объект управления:
w– возмущающие воздействия (Gшин – характеристики шин, Сдор – состояние дороги, Vа – скорость автомобиля, αк – угол поворота колеса, Ви– сила инерции); у
– управляющие воздействия (Вт.к– сила торможения колеса тормозным механизмом, Вт.т – сила торможения механизмом трансмиссии, Вт.д.к. – сила торможения двигателем в режиме компрессии, Вт.д.р – сила торможения двигателем в режиме разрежения); х – управляемые величины (Sп– проскальзывание колеса, Vа – скорость автомобиля, ωк – угловая скорость колеса, ωв.т – угловая скорость вала трансмиссии).
Движителем автомобиля является колесо. Оно обеспечивает движение автомобиля, изменение направления движения, передачу вертикальных нагрузок и гашение колебаний. Управление движением автомобиля осуществляется подводом к колесу силовых воздействий, вызывающих крутящий Мки тормозной Мτмоменты. Тормозной момент Мτпротиводействует крутящему моменту Мк=f(Bи, Вкр), прилагаемому через трансмиссию к колесу за счет сил инерции Bии силы Вкр, создаваемой в цилиндре работающего двигателя. Тормозной момент создается силами, приложенными к тормозному механизму колеса Bт.к или трансмиссииВт.т. Тормозные силы создаются также двигателем при включенной трансмиссии при отключении топливоподачи. Можно использовать силы, возникающие в цилиндре двигателя при сжатии воздуха и противодействующие вращению колеса Вт.д.к(режим компрессии), или силы, возникающие в цилиндре за счет движения поршня при закрытии всех клапанов Вт.д.р(режим разрежения).
Принцип работы и устройство антиблокировочных систем
Применяемые АБС представляют собой замкнутую систему автоматического регулирования. Она состоит из объекта регулирования (колесо автомобиля) и управляющей подсистемы, в которую входят устройство измерения угловой скорости колеса, устройство управления и обработки информации и устройство воздействия, включающее в себя тормозной механизм. Для согласования сигналов устройства управления с датчиками и исполнительными механизмами применяются устройства
248
согласования. На данном этапе развития в автомобиле используются исключительно пневматические или гидравлические исполнительные приводы регулирующих органов (тормозных механизмов). Поэтому для согласования устройства управления с ними используют преобразователи команд, представленных электрическими сигналами, в команды, представленные пневматическими или гидравлическими сигналами. Такие преобразователи получили название модуляторов. Если в качестве устройства управления и обработки информации используется микропроцессорный контроллер, то модулятор выполняет функции преобразователя код – аналог.
ВСАР антиблокировочной системы торможения используют различные принципы управления: по отклонению регулируемой величины,
вкачестве которой выбирают угловую скорость тормозящего колеса ωк, замедление тормозящего колеса (производную от ωк), относительное проскальзывание Sп.o, программное управление, адаптивное управление с оптимизацией по заданным критериям.
Основное затруднение в настоящее время вызывает определение линейной скорости автомобиля. В авиации и ракетной технике эта проблема давно решена с помощью инерциальных систем, в которых используются датчики ускорения (акселерометры). В АБС скорость автомобиля определяют по угловой скорости колеса, но она может определяться и с помощью автоматических деселерометров.
Модуляторы АБС могут иметь различное устройство: клапанное, золотниковое, диафрагменное и смешанное. Они изменяют давление в тормозных цилиндрах по командам, получаемым от устройства управления.
ВАБС используют циклические алгоритмы управления регулируемого параметра. Наиболее распространены двухпозиционные рабочие циклы с фазами нарастания и спада (двухфазные) и трехпозиционные с фазами нарастания, спада и выдержки (трехфазные). Работа по двухфазному циклу обеспечивает увеличение и уменьшение давления в модуляторе, а значит, и тормозного усилия. Работа по трехфазному циклу обеспечивает еще и третье состояние исполнительного механизма – выдержку давления заданной величины в пределах определенного интервала времени. В современных модуляторах еще более усложнен рабочий цикл: применяется несколько фаз с переменными градиентами нарастания и спада давления. Основной характеристикой модулятора является быстродействие, определяемое частотой циклов.
Структурная схема АБС для тормозной системы с пневматическим приводом тормозных механизмов приведена на рис. 15.8, а.
249
На схеме указаны следующие элементы:
1)объект управления ОУ (колесо). Основной параметр – угловая скорость колеса (частота вращения) ωк;
2)Ду.с.к— датчик угловой скорости колеса, выполняющий пре-
образование ωк(ЧМ)М →U(ЧИМ)Eмеханической величины М (частоты вращения колеса ωк), представленной непрерывным гармоническим носителем ЧМ, в электрическую величину Е (напряжение U) с частотноимпульсным носителем ЧИМ.
3) ПЧК – преобразователь частота– код, выполняющий преобразование U(ЧИМ)Е→ U(KИM)E= U( N 2n )Е электрической величины
Е (напряжение U) с частотно-импульсным носителем ЧИМ в электрическую величину Е (напряжение U) с дискретно-квантованным носителем,
представленным двоичным кодом N2n . ПЧК выполняет функции УСO1.
4) УУиОИ – устройство управления и обработки информации, обрабатывающее полученную информацию по заданному алгоритму с учетом цели управления z(t) и преобразующее электрическую величину Е (напряжение U) с дискретно-квантованным носителем, представлен-
ным двоичным кодом N2n , в электрическую величину Е (напряжение U) с дискретно-квантованным носителем и широтно-импульсной модуляцией U( N 2n )Е → U(ШИМ)Е. С выхода УУиОИ команды, представлен-
ные импульсами с переменной длительностью, изменяющейся по требуемому алгоритму управления, поступают на модулятор;
5)УС02 (модулятор) – выполняет функции преобразователя длительности электрического импульса в аналог, преобразующий электрическую величину Е (напряжение U) с дискретно-квантованным носителем и широтно-импульсной модуляцией в пневматическую величину Р(давление Р) с амплитудной модуляцией AM;
6)ИМ – исполнительный механизм (тормозные камеры), преобразующий пневматическую величину Р(давление Р) с амплитудной модуляцией AM в механическую величину М (перемещение фрикционных элементов тормозного механизма G) с амплитудной модуляцией AM.
7)РО – регулирующий орган (тормозной механизм), преобразующий механическую величину М (перемещение фрикционных элементов тормозного механизма G) с амплитудной модуляцией AM в механическую вели-
чину (тормозную силу Вт.к) с амплитудной модуляцией AM;
Для того чтобы АБС обеспечивала надежное тормозное управление, алгоритм ее работы должен учитывать не менее пяти параметров:
250

угловую скорость и ускорение (замедление) колеса, начальную скорость автомобиля при торможении, нормальную реакцию на колесо, коэффициент сцепления колеса с дорогой. Работает АБД следующим образом. Информация о затормаживании колеса поступает с датчика Ду.с.к. Сигнал с датчика через преобразователь частота– код ПЧК поступает на УУиОИ. Последнее обрабатывает входную информацию, характеризующую поведение колес. Как только скорость колеса приближается к нулю, т.е. возникает опасность блокирования колеса, АБС снижает величину тормозного усилия. После некоторой раскрутки колеса давление в тормозных камерах снова возрастает. Такие циклы повторяются до тех пор, пока не исчезнет угроза блокирования колеса или автомобиль не остановится. Сформированные команды на основе полученной информации и алгоритма управления поступают на модулятор, который преобразует команды с УУиОИ в пневматический сигнал, соответствующий параметрам входа исполнительного механизма. ИМ воздействует на регулирующий орган одного или нескольких колес, обеспечивая заданный закон торможения автомобиля.
Рис. 15.8. Схемы одного канала АБС для тормозной системы с пневматическим приводом:а – структурная; б – принципиальная.
Принципиальная схема трехфазной АБС приведена на рис. 15.8, б. Практическое применение в современных АБС нашли индукционные датчики угловой скорости (частоты вращения) тормозящих колес, в которых, на основании законов электромагнитной индукции, генерируются импульсы электрического тока. Для уменьшения влияния электромагнитных помех используют двухпроводную линию связи. Датчик,
251
установленный на колесе, содержит ротор с зубцами 4 и катушку 3. В качестве УУиОИ используется микропроцессорный контроллер, в котором интегрируются (встраиваются) устройства согласования с датчиками (информационные преобразователи, коммутатор сигналов и выходные усилители мощности). На выходе УУиОИ используется преобразователь код– аналог (код – ширина импульса). В трехфазной АБС в качестве модулятора может применяться преобразователь, выполненный на базе пневматического ускорительного клапана. Модулятор предназначен для создания давления в исполнительных механизмах 6 (тормозных камерах) в соответствии с сигналами, поступающими с УУиОИ. Регулирующие органы 5, приводящиеся в действие ИМ, воздействуют непосредственно на колеса.
Работает система следующим образом. АБС автоматически регулирует тормозное усилие на каждом колесе. Поведение колеса в каждый момент времени воспринимается катушкой датчика 3, сигналы которого обрабатываются в УУиОИ. Последнее в соответствии с поведением колеса и алгоритмом управления АБС подает электрический сигнал на тот или иной электромагнит модулятора. Когда электромагниты 1 и 13, подключенные к УУиОИ, обесточены, воздух под давлением Ру- проходит по магистрали 11 от органа управления (тормозного крана или другого управляющего клапана) в надпоршневую полость А. Под действием давления в полости А поршень 10 перемещается вниз и открывает клапан 9, после чего сжатый воздух по магистрали 8 поступает от ресивера в магистраль 7 и далее к тормозным камерам 6. Ускорительный клапан, состоящий из поршня 10 и клапана 9, охвачен корректирующей отрицательной обратной связью, поэтому давление в камерах 6 устанавливается примерно равным давлению в управляющей магистрали 11 и полости А.
При работе АБС сигналы одновременно поступают на оба электромагнита 1 и 13, при этом клапан 12 закрывается, а клапан 2 открывается, и в результате сжатый воздух из полостиАвыходит через открытый клапан 9 в атмосферу, в результате чего происходит падение давления в тормозных камерах 6 (фаза автоматического оттормаживания). При закрытии клапана 2, когда снимается напряжение с электромагнита 1,давление в полостиА и в тормозных камерах достается без изменения (фаза выдержки). Далее в результате снятия напряжения с электромагнита 13 открывается клапан 12 и начинается фаза автоматического затормаживания – давление в полостиА и в тормозных камерах 6 повыша-
252
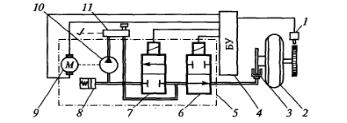
ется. Затем цикл повторяется. Если фазы выдержки нет, получается двухфазный режим работы.
Принципиальная схема АБС с гидравлическим приводом тормозных механизмов приведена на рис. 15.9. На колесе 2устанавливаются индукционный датчик 1 угловой скорости и тормозной механизм 3.Сигналы с датчика поступают на блок управления 4. Он выполняет функции преобразователя частота– код, УУиОИ и выходных усилителей мощности для управления ЭМК. Информация в блоке управления обрабатывается по заданным алгоритмам и на выходе представляется в виде двухуровневых импульсных сигналов с широтно-импульсной модуляцией. При приближении угловой скорости колеса к минимальной (заданной уставкой для данной начальной скорости, т.е. когда колесо начинает блокироваться) команды с блока управления 4 подаются на модулятор 5. Модулятор преобразует род энергии носителя информативного параметра (электрического в гидравлический) и является электрогидравлическим преобразователем. Модулятор содержит два-ЭМК: впускной 6, который открывает магистрали от главного цилиндра 11 и жидкость под давлением поступает к тормозному цилиндру, когда надо увеличить тормозное усилие; выпускной 7, позволяющий жидкости уйти в гидроаккумулятор 8, когда тормозное усилие надо уменьшить. Жидкость из гидроаккумулятора насосом 10 с электроприводом 9 перекачивается в главный цилиндр, создавая требуемое давление в магистрали питания.
Рис. 15.9. Принципиальная схема АБС с гидравлическим приводом тормозных механизмов
Производительность современных контроллеров, особенно на базе микропроцессоров, достаточно велика, что позволяет возложить на них ряд сервисных функций. Они организуют контроль исправности элементов АБС, отключают АБС в случае ее неисправности, переводят
253
систему в режим обычного торможения с оповещением водителя об отключении АБС.
Классификация антиблокировочных систем
По виду элементов. В АБС могут использоваться механические, пневматические, гидравлические элементы. По тому, какой вид энергии используют элементы в устройстве управления, АБС разделяют на механические, пневматические, гидравлические, электрические.
По виду используемой модуляции АБС можно разделить на анало-
говые, частотные и кодовые.
По структуре установки АБС на автомобиле. Динамика автомо-
биля при торможении зависит от структуры (компоновки) АБС, установленной на автомобиле. Различают несколько структурных схем установки АБС по степени сложности. В наиболее сложных системах каждое колесо выделяется в самостоятельный объект управления, который оснащается многоуровневой системой управления. В самых простых используется совмещение элементов АБС для управления группой колес. Оценка структуры АБС производится с учетом всех показателей АБС: эффективности торможения, устойчивости, управляемости, сложности, надежности, стоимости, наличия сервисных функций (возможности диагностики в процессе эксплуатации).
Принято условное обозначение схем установки АБС. Структурная схема АБС представляется дробью, в числителе которой указано число информационных каналов (число применяемых датчиков), а в знаменателе – количество каналов управления. Например, АБС с индивидуальным управлением каждого колеса двухосного автомобиля обозначается 4Д/4К (Латинская транскрипция 4S/4M).
По алгоритмам управления. Структура АБС позволяет использовать определенные алгоритмы управления. Для регулирования проскальзывания колес на осях применяют следующие индивидуальные и групповые алгоритмы:
индивидуальное регулирование проскальзывания каждого колеса
(IndividualRegelung) –IR;
«низкопороговое» регулирование. При использовании этого алгоритма регулирования команды на растормаживание и затормаживание обоих колес оси подают одновременно по сигналу датчика колеса, находящегося в худших по сцеплению условиях, – « слабого» колеса (Select-
Low) –SL;
254
«высокопороговое» регулирование. При использовании этого алгоритма регулирования команды на колеса одной оси подаются датчиком «сильного» колеса, т.е. находящегося в лучших по сцеплению усло-
виях (SelectHigh) –SH;
модифицированное индивидуальное регулирование (ModifizierteIndividualRegelung) –MIR – представляет собой комбинацию из
SL- и IR-регулирований. MIR заключается в том, что вначале осуществляется «низкопороговое» регулирование, а затем постепенно происходит переход к индивидуальному регулированию.MIR целесообразно использовать при торможении на поверхности с различным сцеплением под левым и правым колесами, на повороте и при поперечном уклоне.
Алгоритм управления АБС принято обозначать дробью. В числителе записывается аббревиатура алгоритма управления колесами передней оси, а в знаменателе – аббревиатура алгоритма управления колесами задней оси. Например, АБС с «высокопороговым» (SH) регулированием проскальзывания колес передней оси и «низкопороговым» (SL) регулированием проскальзывания колес задней оси имеет обозначение
SH/SL.
По способу управления давлением жидкости в гидроприводе раз-
личают следующие АБС: плунжерно-поршневые, с прямой передачей давления жидкости и с обратным нагнетанием жидкости.
Плунжерно-поршневой способ заключается в том, что для понижения давления в колесных цилиндрах используется дополнительный объем, который образуется при перемещении плунжера модулятора.
Способ прямой передачи давления предусматривает слив тормозной жидкости при снижении давления (реверсе привода) в расширительный бачок и последующее нагнетание посредством насоса. Жидкость циркулирует по контуру: рабочий цилиндр – расширительный бачок – гидронасос (аккумулятор) – усилитель – рабочий цилиндр.
Способ обратного нагнетания состоит в том, что при работе АБС жидкость сливается из рабочих цилиндров в специальную камеру, из которой затем нагнетается насосом обратно в главный тормозной цилиндр. Объем циркулирующей жидкости не изменяется.
Индивидуальное регулирование IR/IR является оптимальным для обеспечения минимального тормозного пути. Оно возможно только в АБС, имеющей структуру 4Д/4К, при которой каждое колесо оснащается датчиком угловой скорости, модулятором давления и имеет отдельный канал управления в устройстве управления.
255
Применение антиблокировочных систем на автомобиле
Внастоящее время автомобили оснащаются в основном АБС, выпускаемыми зарубежными фирмами. Опытные отечественные АБС уступают зарубежным по надежности и эффективности. Широкое применение АБС на отечественных автомобилях сдерживается высокой стоимостью этих систем. Однако согласно статистическим данным, полученным в службах эксплуатации, применение АБС снижает дорожнотранспортные происшествия с тяжелыми последствиями, а это отодвигает проблему стоимости на задний план. За рубежом обязательна установка АБС на тяжелых грузовиках, междугородных автобусах, прицепах
инекоторых типах легковых автомобилей. Мировыми лидерами в производстве тормозных систем, в том числе и АБС, являются фирмы ITTAutomotive, в которую входят Teves и фирма Bosch.
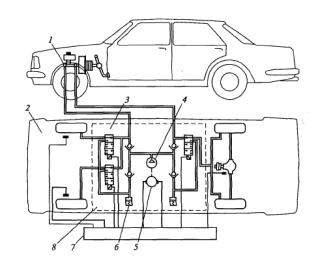
Вкачестве примера рассмотрим систему «АБС2» типа ЗД/ЗК, IR/SL. Структурная схема размещения АБС на автомобиле представлена на рис. 15.10. Система является встраиваемой и не требует изменения штатной тормозной системы. АБС включает в себя: гидравлический агрегат 8, располагаемый между главным тормозным цилиндром 1 и колесными цилиндрами; датчики угловой скорости 2, монтируемые у передних колес и у главной передачи, и блок управления 7, выполняющий функции устройства управления и обработки информации. УУиОИ устанавливается в салоне автомобиля или в моторном отсеке. На полноприводных автомобилях к датчикам угловой скорости добавляется датчик продольного ускорения (замедления). Его информация используется для определения коэффициента сцепления (высокий, низкий) и в алгоритм управления вводится поправка для более точного расчета скорости автомобиля. Гидравлический агрегат 8 состоит из насоса 4 с электродвигателем 5, модулятора с тремя электромагнитными двухпозиционными клапанами 3, двух аккумуляторов с демпфирующими камерами 6.
Всистеме «АБС2» используется обратное нагнетание жидкости в модуляторе при трехфазном цикле. При торможении без блокировки колес электромагнитный клапан 3 соединяет колесный цилиндр с соответствующей секцией главного цилиндра 1и тормозная система работает обычным образом. По информации, поступающей с датчиков, определяется скорость автомобиля. При этом учитывается угловая скорость всех колес и выбирается наибольшая. Рассчитывается ускорение и проскальзывание. Если блок управления обнаруживает тенденцию к блокированию колеса, то электромагнитный клапан переводится в положение, при котором колесный тормозной цилиндр отсоединяется от главного цилиндра и соединяется с магистралью слива. Жидкость перетекает в
256
демпфирующую камеру 6, а затем перекачивается насосом 4 в главный тормозной цилиндр. Давление в колесном цилиндре уменьшается. В фазе выдержки давления электромагнитный клапан переводится в положение, при котором все магистрали разъединены между собой. Следующая фаза нарастания давления осуществляется переводом электромагнитного клапана в первоначальное положение. Жидкость из главного тормозного цилиндра вновь поступает в колесный цилиндр. В случае отказа насоса торможение с антиблокировочной функцией прекращается, но работоспособность тормозного привода сохраняется.
Производятся и трехканальные интегрированные антиблокировочные системы «АБСЗ», в которых главный тормозной цилиндр, гидроусилитель и модулятор образуют единый блок. Преимуществом интегрированной системы является более простая сборка тормозной системы на автомобиле. Использование трехпозиционньгх ЭМК вместо двухпозиционных упрощает конструкцию модулятора.
Рис. 15.10. Структурная схема размещения АБС на автомобиле
Наряду с интеграцией элементов АБС идет процесс их миниатюризации. Сейчас выпускаются компактные АБС с габаритами, не превышающими габаритов обычной тормозной системы.
АБС с индивидуальным регулированием параметров движения колеса являются оптимальными с точки зрения наилучшего тормозного эффекта. Они обеспечивают минимальный тормозной путь. В этом слу-
257
чае требуется установка датчиков положения оси колеса (датчика угловой скорости) на каждое колесо, что усложняет систему.
Конструкцию АБС индивидуальным регулированием можно рассмотреть на примере АБС Bosch 2S, функциональная схема которой приведена на рис. 15.11.
Система управления включает в себя: устройство управления и обработки информации 1; модулятор, включающий в себя сдвоенные клапаны 2–1, обеспечивающие приток и отток рабочей жидкости, с электромагнитами 2–2, гидронасос 2–3 с электроприводом 2–4, аккумуляторы гидравлической энергии 2–5; главный цилиндр тормозной системы 3 с расширительным бачком 4; колесные цилиндры 5 (исполнительные механизмы) с тормозными механизмами; датчики положения оси колеса 6, состоящие из роторного колеса с зубцами и катушки, светового индикатора 7 на комбинации приборов и регулятора тормозных сил 8.
Информация с датчиков положения оси колес 6 поступает в УУиОИ 1. На основании данных с таймера в УУиОИ определяются скорости вращения колес и их ускорение или замедление. Исходя из полученной информации и заданных значений регулируемых величин, определяется момент блокировки колес и формируются команды на управление электромагнитами 2–2 клапанов 2–1 и электропривода 2–4 гидронасоса 2–3.
В модуляторе АБС кроме электромагнитных клапанов, гидронасоса и аккумуляторов гидравлической энергии размещены реле (усилители мощности) электромагнитных клапанов и электропривода насоса.
Алгоритм функционирования АБС включает три фазы: 1) торможение с приводом тормозных механизмов от педали через главный тормозной цилиндр (обычное торможение путем притока рабочей жидкости в цилиндры колес); 2) поддержание тормозного усилия на постоянном уровне; 3) уменьшение тормозного усилия путем оттока рабочей жидкости из цилиндров колес.
258
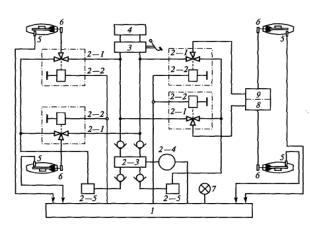
Рис. 15.11. Функциональная схема АБС Bosch 2S
Фаза обычного торможения. При обычном торможении сигнал с УУиОИ в виде напряжения постоянного тока не поступает. Из главного цилиндра тормозной системы рабочая (тормозная) жидкость под давлением нагнетается через клапан притока в колесные цилиндры, приводя в действие тормозные механизмы колес. Клапан оттока закрыт, и гидронасос не работает.
Фаза удержания давления в цилиндрах колес на постоянном уров-
не. При появлении признаков блокирования одного из колес УУиОИ формирует программу цикла работы АБС, удерживая давление на постоянном уровне путем разъединения главного и соответствующего колесного цилиндров. На обмотку клапана подается команда в виде тока силой I1. Поршень клапана перемещается и перекрывает поступление рабочей жидкости из главного цилиндров. Давление в тормозном цилиндре колеса остается постоянным.
Фаза сброса давления. Если опасность блокирования колес сохраняется, УУиОИ выдает на обмотку клапана сигнал в виде постоянного тока силой I2. В результате дополнительного перемещения затвора клапана открывается канал, через который рабочая жидкость сбрасывается в аккумулятор. Давление в колесном цилиндре падает. УУиОИ выдает команду на включение насоса, который откачивает часть жидкости из аккумулятора. Педаль тормоза приподнимается. Вибрация тормозной педали, ощущаемая водителем, является механическим сигналом работы АБС.
259
О включении и нормальной работе АБС сигнализирует световой индикатор 7.
Если колеса задней оси будут находиться в неодинаковых сцепных условиях, то тормозные силы на них также будут неодинаковыми. Для уменьшения разворачивающего момента используется регулятор тормозных сил 9.
Антиблокировочная система Bosch 2S встраивается в готовую тормозную систему в качестве дополнительного оборудования.
Антиблокировочные системы совершенствуются, объединяя все возможности известных тормозных систем. На них возлагаются функции пробуксовочных систем. В таких системах учитываются угол поворота автомобиля, степень отклонения от заданного направления движения и поперечное ускорение. Они стабилизируют движение автомобиля на этапах ускорения и торможения путем регулирования силы тяги и торможения отдельных колес.
Дальнейшее совершенствование АБС связано с появлением системы автоматического регулирования динамики автомобиля (САРДА, в латинской транскрипции FDR). В зависимости от конкретной ситуации и состояния дорожного полотна система FDR автоматически избирательно подтормаживает отдельные колеса.
Тормозные системы оснащаются датчиками скорости движения педали (нажатия на педаль). Быстрое нажатие всегда соответствует аварийному торможению. Система в этом случае помогает водителю активизировать мощность тормозной системы для остановки АТС.
Избыточная производительность современных микропроцессоров настолько велика, что позволяет создать системы управления с любыми функциями практически без дополнительных затрат.
ГЛАВА 16. УПРАВЛЕНИЕ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ
16.1.АВТОМАТИЗАЦИЯ РУЛЕВЫХ УСТРОЙСТВ
Всистемах управления направлением движения АТС (рулевых устройствах) применяются командные механические, пневматические и гидравлические системы управления. Системы с гидроусилителем (бустером) в основном применяются на грузовых автомобилях. Такая система может формировать необходимые для водителя законы управления. Усилие на рулевое колесо формируется за счет дополнительного источника энергии. При использовании гидроусилителей облегчаются условия и повышается производительность труда водителей, улучшается
260