

Глазунов Д.В. управление техническими системами автомобиля
.pdfОсновными функциями автоматических систем аварийно-предуп- редительной сигнализации являются своевременная сигнализация при возникновении нарушений в нормальной работе двигателя, которые могут привести к аварии, а также выдача необходимой информации о характере этих нарушений.
Автоматические системы защиты двигателя предохраняют двигатель от выхода из строя при возникновении аварийной ситуации. Различают аварийные режимы, требующие немедленной остановки двигателя (падение давления масла, превышение допустимой частоты вращения); допускающие кратковременную работу двигателя (перегрев воды, масла, падение давления охлаждающей жидкости); не требующие остановки двигателя (выход из строя обслуживающих систем).
С учетом особенностей применения аварийно-предупредительной сигнализации формируются определенные алгоритмы функционирования этих систем.
При поступлении в систему сигнализации сигнала предупредительного уровня должна включаться предупредительная аварийная сигнализация (звуковая, световая). Если значение контролируемого параметра возвращается в зону допустимых величин, сигнализация отключается. По сигналу аварийного уровня должны включаться система сбора и обработки информации, определяющая код неисправности, а также устройство защиты двигателя. Сигналы аварийного уровня должны запоминаться. Отключение устройств памяти осуществляется вручную.
Все сигналы, функционально зависящие от скоростного режима, следует блокировать, если скоростной режим не соответствует контролируемым уровням параметров. В цепи защиты должны быть предусмотрены ее отключение вручную (с сигнализацией о выключенной защите), а также проверка исправности цепей управления и сигнальных устройств как при работающем, так и неработающем двигателе.
ГЛАВА 12. ИНФОРМАЦИОННЫЕ СИСТЕМЫ НА АВТОТРАНСПОРТЕ
12.1. ОБЩИЕ ПОЛОЖЕНИЯ
Информационные системы являются составной частью любой системы управления. Управление техническими объектами на автомобильном транспорте часто не соответствует современному уровню развития ведущих отраслей, так как по тем или иным причинам в автомобилестроении не всегда учитываются передовые научно-технические
201
достижения. В ряде случаев прослеживается и политика самоизоляции автомобильной отрасли от смежных отраслей, что оборачивается излишними затратами, прежде всего для владельцев транспортных средств. Однако автомобилестроители постепенно осваивают передовые технологии управления техническими объектами, хотя ряд специфических особенностей отрасли сдерживает их внедрение.
Информационные системы, применяемые на автомобильном транспорте, могут отражать: условия движения объекта в потоке транспортных средств при воздействии на него окружающей среды, техническое состояние автомобиля и состояние технологического оборудования и производственного процесса. Эти системы входят в диспетчерские системы управления, автоматизированные системы управления технологическими процессами и автоматизированные системы управления производством.
12.2. ОТРАЖЕНИЕ УСЛОВИЙ ДВИЖЕНИЯ
Для получения оперативной информации об условиях движения используются контрольно-измерительные приборы (КПП). Измеряемые и контролируемые параметры в них отражаются на индикаторах, размещаемых на приборной панели и ветровом стекле. В настоящее время индикаторы КИП объединяются в группы и называются комбинацией приборов (индикаторов). Они предоставляют водителю информацию о скорости движения автомобиля, параметрах работы двигательной установки и агрегатов автомобиля, состоянии генераторной установки и батареи, количестве расходных материалов и топлива в баках.
Возросшее число измеряемых и контролируемых параметров на ДВС и автомобиле привело к чрезмерному усложнению приборной панели. Эта проблема хорошо известна разработчикам АСУТП. Все показывающие, сигнальные и регистрирующие индикаторы не могут быть размещены на ограниченном пространстве передней панели даже при использовании миниатюрных приборов. Восприятие информации от большого числа источников затруднительно, кроме того, принятие на ее основе правильного решения в ограниченные сроки становится невозможным.
Поэтому отдельные приборы измерения и контроля, применяемые на автомобиле, вытесняются информационно-измерительными системами (ИИС). В них информация, получаемая от большого числа источников, предварительно обрабатывается и в обобщенном виде поступает на общую панель дисплея для визуального восприятия водителем в виде цифр, букв, аналоговых и дискретных знаков и графиков. Таким обра-
202
зом, происходит переход от измерения отдельных параметров к контролю и измерению процессов. В ряде случаев ИИС выдает обобщенные характеристики объекта (его образ).
Дальнейшее развитие таких систем и использование в них универсальных микропроцессоров, получивших название «бортовой компьютер», позволили осуществить диалоговый режим, в котором система может выдавать советы пользователю для принятия решения в конкретной обстановке. Информация в таких системах выдается в виде визуальных (с использованием цвета) и звуковых (тональных и речевых) сигналов. Это обстоятельство позволяет отнести такие системы по сложности организации информационных потоков к разряду АСУТП.
Для устранения избыточности информации, поступающей водителю, в информационных системах используют ряд алгоритмов обработки поступающих в систему данных. Только основные параметры измеряются и контролируются локальными системами и выводятся на индикаторы постоянно. Остальные параметры, подлежащие контролю и измерению, ранжируются по степени важности (приоритетам) и выводятся на индикаторы только при отклонении их от заданных значений. Некоторые параметры контролируются в режиме тестирования перед пуском ДВС и агрегатов. Ряд параметров измеряется периодически, а некоторые контролируются по вызову водителя или обслуживающего персонала.
Так как контроллеры современных систем управления строятся исключительно на микропроцессорах, то происходит интеграция различных информационных систем в единую систему управления, измерения и контроля. На современном автомобиле используется информа- ционно-управляющая сеть, содержащая до десятка микропроцессоров на разных уровнях управления.
Современная концепция интегральной системы управления многоплановым объектом «автомобиль – водитель – дорога – окружающая среда» предполагает в дополнение к имеющимся на автомобиле ИИС, бортовым системам контроля и системам диагностики использовать навигационные системы, получающие информацию по каналам связи, в том числе и спутниковым, о состоянии дороги, месте нахождения автомобиля, оптимальном маршруте следования и погодных условиях. Часть датчиков и устройств такой системы устанавливается на автомобиле, а остальные – вдоль дороги на всем ее протяжении.
Практически для всех транспортных средств созданы и широко применяются автоматические средства вождения. Для реализации этой задачи широко используются радиолокационные системы и системы
203
контроля с помощью различных излучений. Радары переднего и заднего обзора, приемники излучений устанавливаются спереди, сзади и под днищем автомобиля. Информация об окружающей обстановке поступает на устройство обработки – бортовую ЭВМ. Сигналы, излучаемые светофорами и кабелями, уложенными по осевой разметке дороги, дают информацию о дорожной обстановке. Обработанная по специальным алгоритмам информация в контроллере преобразуется в команды, которые поступают на исполнительные устройства двигателя, тормозную систему и рулевое управление. Такие системы реагируют на дорожные знаки, выполняя необходимые маневры и регулирование скорости даже в сложных погодных условиях.
12.3. ОТРАЖЕНИЕ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОМОБИЛЯ
Для получения информации о техническом состоянии автомобиля перед выездом, в процессе движения и после возвращения на стоянку используются различные КИП, на которые возлагается задача информировать водителя о возникновении аварийных режимов. Водитель, проанализировав полученную информацию, с учетом статистических данных, накопленных им в процессе эксплуатации автомобиля, и личной интуиции определяет причину аварийного режима и степень его опасности. Эти операции относятся к функциям систем, обеспечивающих безаварийную эксплуатацию транспортных средств.
Большие материальные и трудовые затраты на техническое обслуживание автомобилей привели к возникновению специализированных систем контроля, иногда называемых бортовыми системами контроля (БСК). С помощью БСК можно проверить готовность автомобиля к эксплуатации или определить весь комплекс работ по обслуживанию автомобиля перед выездом. В дальнейшем эти системы стали снабжаться накопителями информации с возможностью ее обработки и классификации неисправностей и предаварийных ситуаций, что превратило их в контрольно-диагностические системы. Такие системы позволяют водителю узнавать о неисправностях и причинах их возникновения не на стационарных стендах станции технического обслуживания (СТО), а непосредственно при их возникновении. В ряде случаев такая информация является крайне необходимой, так как некоторые неисправности невозможно обнаружить на стендах СТО. Контрольно-диаг- ностические системы могут работать в автоматизированном и ав-
204
томатическом режимах. Для расширения возможностей БСК на автомобиле и его агрегатах устанавливают дополнительные датчики и контрольные точки (встроенные датчики), которые упрощают бортовую систему за счет использования стационарных систем обработки информации.
12.4. РАЗВИТИЕ АВТОМОБИЛЬНЫХ ИНФОРМАЦИОННЫХ СИСТЕМ
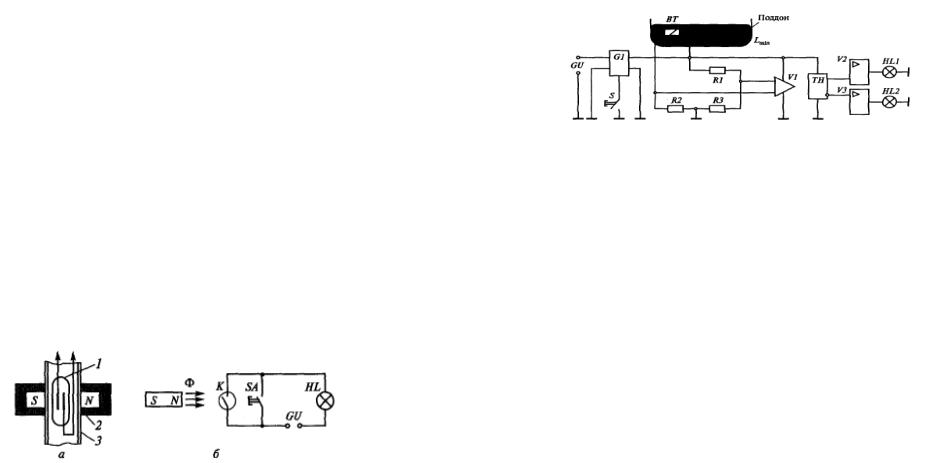
На первых этапах создания систем контроля и измерения использовались исключительно простые КИП. В дальнейшем они стали объединяться в бортовые системы контроля. В состав простейших БСК входят датчики контролируемых параметров, устройства управления и средства отображения информации (индикаторы). Например, для контроля уровней омывающей и охлаждающей жидкости или масла в двигателе используются поплавковые датчики со встроенными кольцевыми магнитами (S–N) и герконовыми преобразователями (рис. 12.1). На рис. 12.1,а показана конструкция датчика, а на рис. 12.1, б принципиальная электрическая схема контроля уровня масла в поддоне двигателя. При достижении поплавком заданного уровня контакты геркона под действием магнитного поля Ф замыкаются и включают сигнальный индикатор HL. Дляпроверки исправности лампы индикатора служит кнопка SA.
Рис. 12.1. Контроль уровня масла в поддоне:
а – конструкция датчика: 1 – герконовый контакт; 2 – магнит;3 – трубка из диамагнитного материала; К – герконовое реле;SA– кнопка; HL– индикатор; GU– источник питания;б – принципиальная схема.
205
Рис. 12.2. Принципиальная схема сигнализатора уровня масла в поддоне по вызову
Отдельные контрольные приборы в дальнейшем объединялись в единую систему с релейными устройствами управления.
На следующем этапе развития актуальным стал вопрос информационной разгрузки водителя. На рис. 12.2 приведена принципиальная схема сигнализатора уровня масла в поддоне двигателя по вызову. Так как температура масла в поддоне отличается от температуры окружающей среды, то для контроля разделения двух разнотемпературных сред возможно использование датчиков температуры. В поддоне на глубине, соответствующей минимальному уровню масла, устанавливается терморезистор ВТ, выполняющий функции датчика системы контроля уровня. Терморезистор включается в мостовую цепь, выход которой через усилитель V1 подключается к пороговому элементу ТН, например, триггеру Шмитта. На выходы ТН через усилители V2, V3 подключаются сигнальные лампочки HL1 (красная) и HL2 (зеленая).
При необходимости проверки уровня масла оператор подает команду нажатием кнопки S. Запускается одновибратор (таймер) G1, формирующий одиночный импульс длительностью 25 с. На время работы G1 от источника напряжения GUна схему сигнализатора подается напряжение U. Сигнализатор включается в работу. Если датчик не соприкасается с маслом, его температура высокая и сигнал с мостовой цепи приводит к срабатыванию порогового элемента ТН. На прямом выходе ТН появится сигнал «1» и включит красную лампочку HL1, которая сигнализирует о недостаче масла. Если датчик ВТ находится в масле, его температура снижается и сигнал не переключает элемент ТН. На инверсном выходе ТН появится сигнал «1» и усилитель V3 подключит зеленую лампочку HL2. Через 25 с одновибратор перейдет в исходное состояние и отключит схему от источника питания.
206
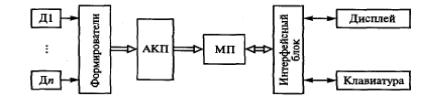
На современном этапе развития системы измерения и контроля объединяются в информационно-измерительную систему (рис. 12.3).
Рис. 12.3. Структурная схема информационно-измерительной системы
Сигналы с датчиков Д1... Дn, воспринимающих различные параметры объекта, через устройства формирования сигналов и преобразователи аналог– код АКП поступают на устройство обработки информации. В качестве такого устройства используются микропроцессоры. Обработанные по программам, заложенным в микропроцессор МП, данные выводятся через интерфейсный блок на дисплей. Команды на МП подаются через клавиатуру. Для согласования работы дисплея и клавиатуры применяется интерфейсный блок. Сигналы с датчиков, как правило, имеют нестандартные параметры по форме и размеру. На них часто накладываются шумы и помехи. Для фильтрации помех и согласования выходных параметров сигналов датчиков с входными параметрами аналого-кодовых преобразователей используются формирователи. При использовании в качестве микропроцессора универсальной ЭВМ возможности такой системы возрастают.
12.5.МЕСТО И НАЗНАЧЕНИЕ ИНФОРМАЦИОННЫХ СИСТЕМ
ВСИСТЕМАХ УПРАВЛЕНИЯ
Внастоящее время в автомобилестроении происходит замена отдельных измерительных приборов и устройств контроля различных параметров на многоканальные централизованные информационноизмерительные (ИИС) и информационно-вычислительные системы (ИВС) с центральным многофункциональным индикатором. Пока такие системы используются для управления АТС в процессе движения, проверки состояния АТС перед выездом, обеспечения безопасности в процессе движения, решения навигационной задачи и диагностики различных устройств АТС в процессе непосредственной работы и всего периода эксплуатации.
207
Широко используются ИИС, обеспечивающие контроль за состоянием технических средств АТС. В настоящее время ИИС начинают применяться для обеспечения водителя информацией об окружающей обстановке в процессе маневрирования. К таким системам можно отнести системы предупреждения столкновения, локаторы заднего обзора и т.д.
Информационно-вычислительные системы параметров движения
исостояния АТС находят применение на автомобилях для решения навигационной задачи. ИВС предназначены для измерения, накопления, вычисления и выдачи на цифровой дисплей информации о параметрах движения и состоянии автомобиля. Функции, выполняемые ИВС, связаны с измерением пройденного автомобилем пути (расстояния), времени
иколичества поступающего в двигатель топлива.
На основании этих параметров процессор рассчитывает и выдает на дисплей ряд дифференциальных и интегральных параметров (таких как скорость движения, расход топлива и др.).
Функции ИВС подразделяют на основные и расширенные.
Косновным функциям относятся определение пройденного пути
ивремени, расчет средней скорости, мгновенного и среднего расхода топлива. Расширенные функции предусматривают измерение текущего времени, расстояния, времени за рулем, контроль скорости, индикацию расстояния до цели, оценку времени прибытия и расстояния, которое можно пройти на остатке топлива.
Запас по производительности микропроцессора ИВС позволяет включать в систему дополнительные функции (например, сигнализацию при попытке угона, поддержание заданной скорости).
12.6. СИСТЕМЫ УПРАВЛЕНИЯ НА АВТОМОБИЛЬНОМ ТРАНСПОРТЕ
Автотранспортные средства на разных этапах материального производства выступают в разных качествах. Так, на этапе проектирования системы и агрегаты автомобиля являются техническими объектами управления, на этапе производства – технологическими и производственными объектами управления, на этапе эксплуатации АТС выступают как технологические объекты управления при ремонте и обслуживании и как элементы транспортной системы при организации перевозочного производственного процесса.
Структурная схема системы управления при технической эксплуатации АТС представлена на рис. 12.4, а. Здесь цель управления z
208
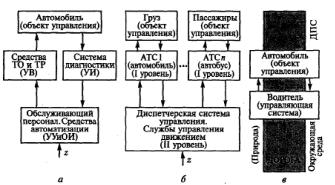
заключается в поддержании технических показателей АТС в заданных техническими условиями пределах.
На рис. 12.4, б представлена структурная схема системы управления перевозочным процессом. Цель управления – координация движения и обеспечение безопасности! Здесь можно выделить два уровня управления. На первом уровне система управления включает в себя АТС
иводителя в качестве управляющей подсистемы. На втором уровне управляющей подсистемой является диспетчерская служба. В процессе управления перевозочным процессом непосредственными участниками процесса управления являются службы организации дорожного движения. При организации перевозочного процесса решается транспортная задача: доставка грузов или пассажиров в заданный пункт за определенное время с минимальными затратами. При этом возникают определенные ограничения по скорости движения, запасу топлива; времени в пути
ит.д. При движении АТС возникает задача обеспечить взаимодействие сложной системы «водитель – АТС – дорога – среда».
На первом уровне в процессе управления движением АТС на маршруте перевозки груза (рис. 12.4, в) можно выделить два момента:
управление АТС в пределах видимости дороги водителем. Здесь, используя органы управления АТС и информацию, снимаемую с индикаторов приборов и информационных систем, водитель осуществляет троганье, торможение, повороты и т.д., обеспечивая необходимое движение (вождение) АТС.
управление на всем маршруте. Здесь водителю приходится решать навигационную задачу, используя карты или схемы маршрута, дорожные указатели и знаки и показания приборов АТС. В данном случае водитель совмещает функции пилота и штурмана. Навигационная задача определяется поставленной целью.
Цель управления на этом этапе – управление маневрированием (вождением) и обеспечение транспортирования груза.
209
Рис. 12.4. Структурные схемы управления на автомобильном транспорте: а – управление технической эксплуатацией автомобиля; б – управление перевозочным процессом; в – управление АТС в процессе движения; ТО – техническое обслуживание; ТР – технический ремонт; УИ – устройства измерения; УВ – устройства воздействия; УУиОИ – устройства управления и обработки информации; z– цель управления.
Как и все процессы управления, навигация транспортных средств автоматизируется. На всех основных видах транспорта эта задача решена. На самолетах давно используется автопилот, на кораблях – авторулевой, на локомотивах – автомашинист. Сначала автоматизировался установившийся режим работы транспортного средства, а затем и переходные режимы (для самолета это взлет и посадка). Вопрос автоматизации навигации автомобиля практически решен, но внедрение ее сдерживается по чисто экономическим причинам, а в нашей стране еще и из-за бюрократических запретов на геодезическую информацию. За рубежом в настоящее время широко внедряются навигационные системы, а в технически обоснованных случаях и автоводитель.
12.7. ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНЫЕ СИСТЕМЫ НА АТС
Системы определения параметров движения АТС
Информационно-вычислительные системы облегчают водителю решение навигационной задачи. В таких системах используется информация о движении и состоянии АТС, поступающая от бортовых систем, и информация о дорожных и метеорологических условиях (обледенение,
210

пробки, ремонт), поступающая от измерительных систем, установленных вдоль автомагистрали на всем ее протяжении, а также от метеостанции и бюро погоды. Внешние данные передаются по специальным или спутниковым линиям связи. Карты дороги с указанием оптимального маршрута могут поступать в систему из общей базы данных по каналу связи или предварительно записываться в память микропроцессора информационной системы. Современные навигационные системы включают в себя спутниковые средства пеленгации и точного определения местоположения (координат) АТС, которые могут совмещаться со спасательной системой. Такая система может с помощью специального маяка передавать сигналы службе обслуживания и спасения. Система определения координат АТС в технической литературе получила название «навигатор».
Навигационные информационно-вычислительные системы начинают использоваться и на отечественных АТС. Эти системы выполняют следующие функции:
сбор информации о состоянии АТС; сбор информации об условиях движения АТС; обработку полученной информации; накопление информации;
представление водителю параметров, необходимых для решения навигационной задачи;
диагностику состояния отдельных устройств и системы в целом. Как видно, эти системы относятся к классу информационно-
измерительных и информационно-вычислительных систем. При больших объемах хранящейся информации они могут рассматриваться и как базы данных, т.е. информационно-поисковые системы (ИПС). Такие информационные системы дополняются простыми средствами связи (автомобильными радиоприемниками), по которым службами организации дорожного движения передается информация о дорожной обстановке; мобильными телефонами, позволяющими водителю самому запрашивать дорожную обстановку и метеоусловия по маршруту.
Внавигационных измерительно-вычислительных системах в качестве устройства обработки информации применяются исключительно МП. Так как устройства обработки информации на базе МП по структуре аналогичны ЭВМ (компьютерам), то они получили в технической литературе название «маршрутные компьютеры». Этот термин не отражает сущности таких систем.
Внастоящее время в навигационных информационных системах еще используются специализированные МП, однако все шире внедряются уни-
211
версальные МП. Так, технический прогресс в микроэлектронике позволил создать дешевые и высокопроизводительные МП с разнообразными функциями. Широкое применение, в том числе и в автомобилестроении, находят универсальные МП фирм Atmel, Motorola и др.
Применение МП большой производительности позволяет путем дифференцирования и интегрирования измеряемых величин определять различные показатели, связанные с процессом управления АТС. Избыточность информации, получаемой от КИП и ИИС, обусловливает применение информационных систем с управляемым способом представления (отображения) данных на индикаторах. Различают системы с индивидуальным и иерархическим способом отображения информацией регулируемым потоком информации.
В рассматриваемой ниже информационно-вычислительной навигационной системе применяется способ представления информации по требованию водителя.
Навигационная информационно-вычислительная система
Структурная схема навигационной ИВС представлена на рис. 12.5. Как видно из схемы, она строится как многоканальная система с временным разделением каналов, централизованной обработкой информации и центральным многофункциональным индикатором – дисплеем.
Рис. 12.5. Структурная схема навигационнойинформационно-вычислительной системы
В состав системы входят устройства измерения, включающие в себя датчик пути Дп и датчик количества топлива Дк.т для восприятия основных параметров движения и состояния АТС, информационные
212
преобразователи ИнП для формирования сигналов и измерительные преобразователи ИП, устройство обработки информации на базе микропроцессора МП, часы (таймер) для отсчета реального времени и временных интервалов, клавиатуру (пульт управления), дисплей (индикаторы) и резервное ОЗУ.
Устройство измерения подключается к микропроцессору через канал связи (порт) КС1, а клавиатура и дисплей – через каналы связи КС2, КСЗ. Используемые в таких системах датчики преобразуют физическую величину, воспринимаемую их чувствительным элементом, в унитарный код (число импульсов). Информационные преобразователи ИнП формируют выходные сигналы с датчиков так, чтобы они соответствовали требованиям к входным сигналам микропроцессора. В измерительных преобразователях ИП осуществляется измерение физических величин (параметров), характеризующих состояние технических средств автомобиля.
На основании измеренных параметров и текущего времени устройство обработки информации вычисляет ряд параметров, необходимых водителю для решения навигационной задачи. Так, путем дифференцирования пути по времени определяется скорость автомобиля, путем дифференцирования количества топлива по времени – расход топлива, а по пройденному пути расход топлива на 100 км. Путем интегрирования определяются пройденный путь и общее количество израсходованного топлива. Временные интервалы для интегрирования и дифференцирования параметров задаются таймером и устанавливаются по желанию водителя.
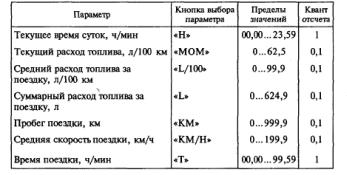
Таблица 12.1
Параметры, рассчитываемые ИВС автомобиля
213
В табл. 12.1 представлены параметры, которые измеряются и рассчитываются информационно-вычислительной системой и представляются водителю на дисплее. Режим работы и порядок вывода параметров на дисплей задается с пульта управления (клавиатуры).
Обработка получаемой информации ведется по программам, заложенным в память МП. Включение системы в работу осуществляется через выключатель замка зажигания. Резервное ОЗУ постоянно подключено к сети питания, чем обеспечивается сохранение необходимой информации при выключении замка зажигания.
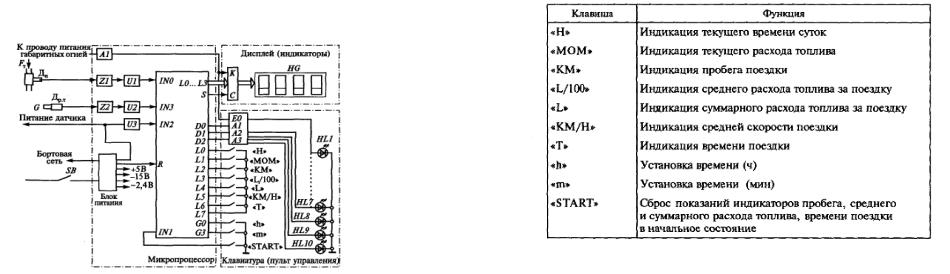
На рис. 12.6 представлена принципиальная схема ИВС (маршрутного компьютера). На схеме указаны датчики Дп и Др.т; формирователи, включающие в себя фильтры Z1, Z2 и ограничители сигналов U1... U3; микропроцессор, дисплей и клавиатуру. Режим вывода параметра на четырехразрядный индикатор HGопределяется положением переключателей на пульте управления, которое устанавливается с помощью сигнальных светодиодных индикаторов HL1...HL10. Измерительные преобразователи объединены в одной микросхеме с МП. Конструктивно платы процессорного блока, клавиатуры, индикатора и блока питания размещены в пластмассовом кожухе, на лицевой панели которого помещены кнопки управления, светодиоды и табло цифрового индикатора. Датчик количества топлива устанавливается в топливную магистраль между насосом и карбюратором. Он преобразует расход топлива Fтв унитарный (единичный) n-разрядный код N1n . Этот датчик имеет коэффициент преобразования 16 000 импульсов на 1 л протекающего бензина. Датчик пути устанавливается на привод спидометра у коробки передач. Он преобразует угловое перемещение колеса, соответствующее линейному перемещению Gавтомобиля, в унитарный (единичный) m- разрядный код N1m . Датчик вырабатывает 10 импульсов на один оборот вала спидометра, что соответствует одному метру пройденного пути. Выходные сигналы от датчиков расхода топлива и пути, пройденного автомобилем, поступают на МП через формирователи импульсов, состоящие из входных фильтров Z1, Z2 и ограничителей U1, U2. Сигнал от замка зажигания SBпоступает на блок питания и переводит МП из дежурного режима в рабочий. Сигнал от габаритных огней автомобиля подается в процессорный блок через формирователь А1и служит командой для уменьшения яркости индикатора в ночное время суток. Все узлы процессора и датчики питаются от стабилизированного источника питания, подключенного к бортовой сети автомобиля и обеспечивающего напряжения: +5 В, –15 В и ~2,4 В для питания люминесцентного ин-
214
дикатора. Управляют режимом работы МП и выбирают необходимый параметр замыканием контактов переключателей клавиатуры (табл.
12.2).
Рис. 12.6. Принципиальная схема маршрутного компьютера
В состав клавиатуры входят также набор светодиодов НL1...НL10, которые индицируют выбранный параметр и подсвечивают надписи на панели приборов в темное время суток.
Для бесперебойной работы часов и первоначальных установок МП должен быть постоянно подключен к бортовой сети. При первом включении производят первоначальные установки времени и параметров KM, L/100, L, КМ/Н, Т. Включением зажигания МП переводится в рабочий режим, при этом включаются световое табло и светодиодные индикаторы на передней панели клавиатуры.
При движении автомобиля МП в соответствии с записанной в нем программой обрабатывает информацию, содержащуюся в сигналах, поступающих с датчиков пути и расхода топлива, а также от часов, находящихся внутри МП.
Таблица 12.2
215
Функция переключателей клавиатуры
На основании полученных данных рассчитываются и индицируются семь параметров, характеризующих состояние ДВС и условий движения.
В настоящее время выпускается несколько моделей навигационных ИВС (маршрутных компьютеров): МК-93, МК-2112 и МК-2114.
Маршрутный компьютер МК-93. В зависимости от комплектации МК может быть установлен на автомобили с карбюраторным двигателем или системой распределенного впрыска топлива. Маршрутный компьютер обрабатывает сигналы, поступающие от датчика пути, пройденного автомобилем, и датчика расхода топлива, и рассчитывает основные параметры. В системах с впрыском топлива информация о его расходе может быть получена из МП системы подачи топлива.
Информация, получаемая с МК, позволяет также при использовании правил экономичного вождения автомобиля добиваться снижения расхода топлива на 10... 15%. Анализ параметров расхода топлива, выдаваемых МК, позволяет осуществлять ежедневную диагностику состояния автомобиля.
Системы определения координат АТС
216
Маячковые системы определения координат АТС. По анало-
гии с судовыми навигационными системами ведутся разработки навигационных систем для АТС с использованием маяков. Маяки с инфракрасным излучателем устанавливаются на транспортных путях. Они имеют точную привязку к местности и свой код. На автомобиле устанавливается приемник с дешифратором. В простейшем случае маяки указываются на карте, и по коду маяка водитель определяет местоположение АТС. При использовании ИВС с микропроцессором карта может быть внесена в его память, и маяки будут отражаться на экране дисплея. Вместе с кодом маяка может передаваться и дополнительная информация о дорожной обстановке и сервисном обслуживании на данном участке дороги.
Компасные системы определения координат АТС. Для опре-
деления координат АТС могут применяться компасные системы навигации. Разработаны надежные малогабаритные магнитные компасы с полупроводниковыми преобразователями положения чувствительного элемента компаса в электрический сигнал. При наличии МК и датчика пути можно определять расстояние, пройденное по каждому азимуту. Координаты местоположения АТС относительно начальной точки движения выдаются на дисплей ИВС.
Пеленгационно-спутниковые системы определения коорди-
нат АТС. Такие системы в настоящее время разработаны как в нашей стране, так и за рубежом. Радиомаяк с кодовыми посылками, установленный на АТС, пеленгуется несколькими пеленгаторами, установленными на спутниках. По каналу связи географические координаты, определенные навигационной системой, передаются на дисплей АТС. Микропроцессорное устройство обработки информации хранит в памяти карту маршрута и по заданию водителя и истинным координатам АТС прокладывает маршрут.
Как показали результаты эксплуатации таких систем, они очень легко могут быть доработаны для выполнения функций систем оповещения и вызова. Кроме навигационных они позволяют решать и другие задачи. В систему входят две кнопки, расположенные на консоли, передающее устройство канала связи и управляемый голосом сотовый телефон. В случае необходимости водитель просто нажимает одну из двух кнопок – для вызова скорой или технической помощи. Диспетчер соот-
217
ветствующей службы получает запрос и координаты АТС. В зависимости от содержания запроса он принимает решение и отвечает на звонок. Диспетчер поможет не только определить местонахождение автомобиля, но и выберет кратчайший маршрут к цели путешествия и сообщит примерное время в пути. К тому же, он немедленно предупредит, если на дороге начаты ремонтные работы или возникли другие непредвиденные обстоятельства.
Эти системы помогают водителю справиться практически с любыми отклонениями от запланированного маршрута.
Если водитель пострадал в аварии и не в состоянии самостоятельно связаться с оператором, в работу могут включиться датчики, реагирующие на механические повреждения автомобиля. С их помощью сигнал будет передан диспетчеру спасательной службы автоматически. Такие системы можно отнести к элементам пассивной безопасности.
Навигационная функция системы позволяет двигаться по незнакомому маршруту более уверенно, а значит, положительно влияет на активную безопасность. В дальнейшем неотъемлемой частью такой системы станет Интернет. Каждый автомобиль может получить собственный электронный адрес, и связь будет двусторонней. Для связи предполагается использовать мобильную телефонную сеть. Водитель и пассажиры смогут получать разнообразную информацию, например, адрес ближайшей АЗС или мотеля, система напомнит о необходимости замены масла, на ходу выполнит диагностику двигателя и тормозной системы, а при необходимости выдаст соответствующие рекомендации. Разработчики навигационных систем предполагают использовать коммуникационные сети в борьбе с угонщиками автотранспортных средств. Для этого используются устройства, при необходимости блокирующие работу различных систем – замков, зажигания, рулевого управления и т.п. Система может передавать сообщение о вскрытии автомобиля. В случае угона специальный датчик, установленный на машине, позволит определить ее местонахождение.
218
ГЛАВА 13. РАЗВИТИЕ СИСТЕМ УПРАВЛЕНИЯДВИЖЕНИЕМ АТС
13.1. ОБЩИЕ ПОЛОЖЕНИЯ
Автомобиль как транспортное средство представляет собой составной, многомерный и сложный многопараметрический объект управления. Система управления автомобилем является многоуровневой системой. На нижнем уровне используются различные устройства и системы непосредственного, автоматизированного и автоматического регулирования и управления, а на верхнем – водитель, выполняющий функции управляющей подсистемы, который осуществляет ручное и автоматизированное (операторное) командное управление.
Процесс управления автомобилем включает в себя трогание, ускорение, стабилизацию скорости и траектории движения, маневрирование, торможение и остановку. Для осуществления этих этапов водитель регулирует необходимое для движения усилие, скорость и направление. Для этого на автомобиле имеются соответствующие органы управления. Возмущающие воздействия, определяемые внешней средой, и множество вариантов сочетаний скорости, силы и направлений усложняют управление автомобилем.
При управлении движением (вождении) транспортного средства приходится решать следующие задачи:
управление скоростью на тяговых режимах; управление скоростью на тормозных режимах; управление направлением движения; управление плавностью хода.
В своем развитии системы управления движением АТС прошли несколько стадий. Еще недавно основными были системы прямого (непосредственного) управления с механическими органами управления. В таких системах с помощью рычагов, приводимых в действие мышечной силой водителя, через органы управления (рукоятки, педали и т.д.) передаются команды на регулирующие органы АТС. При этом усилие на рычагах не должно превышать определенных значений. Силовое воздействие, прикладываемое к рукоятке или педали, может усиливаться посредством рычагов и передаваться к регулирующему органу. В таких системах для управления скоростью на тяговых режимах водитель использует педаль, непосредственно связанную с дроссельной заслонкой, педаль сцепления, связанную через рычаг с муфтой сцепления, и рукоятку (рычаг) переключения передач.
219
Для управления скоростью на тормозных режимах используют педаль тормоза, связанную через рычаги с тормозными колодками, и рукоятку ручного тормоза, также связанную с тормозными колодками.
Для управления направлением движения служит рулевое колесо (штурвал), связанное через соответствующие рычаги и передачи с управляемыми колесами, а для управления плавностью хода – упругие саморегулирующиеся элементы подвески (рессоры и амортизаторы).
Следующим этапом развития систем управления были командные системы управления с исполнительными усилительными механизмами. В таких системах для перестановки рабочих и регулирующих органов агрегатов и систем АТС необходимо применять приводы, потребляющие энергию различного вида от дополнительных источников.
13.2. ИСТОЧНИКИ ЭНЕРГИИ ДЛЯ СНАБЖЕНИЯ СИСТЕМ УПРАВЛЕНИЯ
Для нормального функционирования всех систем на современном автомобиле имеются следующие источники энергии:
механической – двигатель; гидравлической – насосы; пневматической – компрессоры; электрической – генераторные установки;
тепловой – отопительно-подогревающие системы; световой – источники света.
Основным источником энергии является двигатель. Его механическая энергия преобразуется в другие виды непосредственно или через промежуточное преобразование в электрическую энергию. Потребители тепловой энергии могут утилизировать тепло двигателя или иметь независимый источник.
Основными параметрами источников энергии являются напряжение, давление, температура и мощность (производительность). Для успешного использования дополнительных источников требуется стабилизация их выходных параметров, а это можно обеспечить только путем применения автоматических регуляторов. Это регуляторы напряжения, давления, температуры и т.д.
Командные системы управления применяются для управления режимами двигателя, тормозами, сцеплением, коробкой передач и др. Они обеспечивают минимальные затраты физических и нервных усилий водителя при управлении автомобилем, что способствует безопасности движения и повышает производительность труда.
220