

2.1. Точные методы исследования нелинейных сау. Метод фазовой плоскости. 2. Анализ нелинейных систем автоматического управления.
Цель задания - исследование свободных режимов движения в нелинейной САУ методом фазовой плоскости.
Необходимо выполнить следующие задачи:
• Записать уравнения движения системы.
• Получить уравнения
фазовых траекторий на фазовой плоскости
 ,
где
,
где
 .
.
• Коротко описать суть методов припасовывания и точечных преобразований.
• Определить асимптоты и линии переключения на фазовой плоскости.
• Определить параметры предельного цикла.
• Нарисовать фазовый портрет исследуемой нелинейной системы.
• Выбрать начальные условия внутри и вне предельного цикла и снять осциллограммы (по времени и на фазовой плоскости ).
№ варианта |
|
|
|
|
1 |
0,5 |
0,1 |
0,01 |
0,8 |





Уравнения движения системы
T + T
+ T =−kF
(x)
, где F(x) принимает
значения от –с до с.
=−kF
(x)
, где F(x) принимает
значения от –с до с.
F (x)= 0.8, x≥0.01, x’ ≥0
0.8, x≥−0.01, x’ <0
−0.8, x<0.01, x’ ≥0
−0.8, x<−0.01, x’ <0
Соответственно запишем уравнение движения так:
При
0.8, x≥0.01,
x’ ≥0
или 0.8,
x≥−0.01,
x’
<0 :
T
+ T =−0,4
=−0,4
А при −0.8, x<0.01, x’ ≥0 или −0.8, x<−0.01, x’ <0 : T + T =0,4
Уравнение движения фазовых траекторий на фазовой плоскости {x,y}, где y=x’
Формулу уравнения движения T + T =−kF (x) можно представить в виде:
=y
;
 =
= (−kc−y);
(−kc−y);
На фазовой плоскости можно выделить две области, на которых F(x) принимает значения –с и с.
а) Для области 1, где F(x)= - c
=y ;
= 10 (−0,4−y);
 =
=
Решив это уравнение, получаем уравнение фазовых траекторий в области 1:
x=0.08 ln∣y+0.4∣−0 .1y+C1 .
б) для области 2, где F(x)=c
=y ;
= 10 (0,4−y);
=
Решив это уравнение, получаем уравнение фазовых траекторий в области 2:
x= .08
ln∣y-0.4∣−0
.1y+C2
.
.08
ln∣y-0.4∣−0
.1y+C2
.
2.Метод точечных преобразований.
Метод точечного преобразования представляет собой усовершенствование метода
припасовывания с привлечением геометрических представлений в фазовом пространстве.
Запишем в общем виде уравнения динамики нелинейной системы второго порядка без
внешнего воздействия:
![]()
Н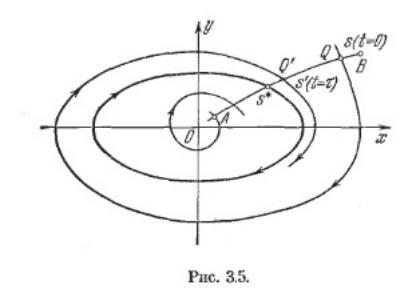 а
фазовой плоскости (x, y) возьмем какой-нибудь
отрезок линии АВ, который
а
фазовой плоскости (x, y) возьмем какой-нибудь
отрезок линии АВ, который
пересекается фазовыми траекториями в одном направлении (рис. 3.5). Обозначим через s
координату произвольной точки Q на отрезке АВ, отсчитываемую вдоль дуги АВ от начала A
Пусть решение уравнений x = x(t), y = y(t)
дает фазовую траекторию, проходящую
через точку Q. Допустим далее, что с
увеличением t эта фазовая траектория
снова пересечет отрезок АВ в некоторой
другой точке Q' (рис. 3.5). Координату
точки Q' по дуге АВ обозначим s’. Точка Q' (первого следующего пересечения отрезка АВ той же фазовой траекторией) называется последующей по отношению к исходной точке Q. Зависимость s’ = f(s), соответствующая ходу фазовой траектории в силу решения уравнений (3.12), называется функцией последования. Функция последования определяет закон точечного преобразования для данной нелинейной системы.
Определение последующих точек по заданным исходным на отрезке АВ и называется
точечным преобразованием отрезка АВ самого в себя. Ввиду непрерывности
расположения фазовых траекторий исходные и последующие точки заполняют весь
отрезок. Однако каждая точка отрезка АВ не обязательно имеет последующую внутри
этого отрезка. Фазовые траектории, пересекающие отрезок, могут и не возвращаться к
нему.
Возможен такой случай, что последующая точка Q' совпадает с исходной Q, т. е. f(s) = s =
s*.
При этом мы получаем замкнутую фазовую траекторию (рис. 3.5): предельный цикл или
кривую, соответствующую особой точке типа ≪центр≫, и т. п. Последнее выясняется из
хода соседних фазовых траекторий. Случай (3.14) называется точечным преобразованием
точки Q самой в себя. Это неподвижная точка в общем точечном преобразовании отрезка
АВ.
Есть фазовая траектория, пересекающая отрезок АВ в точке Q. С увеличением времени t
э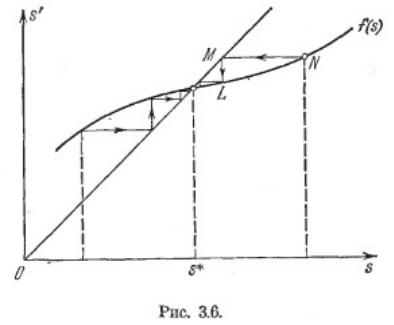 та
траектория опять пересекает АВ в точке
Q`. Координата точки Q по дуге АВ – s, точки
Q` – s`. Точка Q- последующая к точке Q`.
s`=f(s), соответствующая ходу фазовой
траектории, называется функцией
последования
та
траектория опять пересекает АВ в точке
Q`. Координата точки Q по дуге АВ – s, точки
Q` – s`. Точка Q- последующая к точке Q`.
s`=f(s), соответствующая ходу фазовой
траектории, называется функцией
последования
(при f(s)=s=s* - замкнутая фазовая
траектория). Если процесс сходится к предельному циклу s*, то это устойчивый предельный цикл. Параметрическая форма: τ-параметр(содержащий время прохождения изображающей точки по фазовой траектории от исходной точки Q до её последующей Q`) Пусть в точке Q будет t = 0, а в точке Q1 обозначим t = τ. На участке фазовой траектории QQ1 имеем
F(x) = с. Поэтому уравнения принимают вид:
T =−kc;
=y;
=−kc;
=y;
Интегрирование их дает:


Обозначим ординаты точек Q и Q1 через y0 и y1 соответственно.
Закон точечного преобразования будем искать в виде функций y0 τ , y1 τ .
При начальных условиях (точка Q) t=0 , x=b , y=y0 определяются постоянные:

 ;
;
 )
)
 ;
;
Для Q1 t = τ, x = -b, y = y1:
 -0.4
-0.4
![]()
-0.02 = -0,1( +
0.4)
+
0.4) - 0.4τ + 0.02 + 0,02(y0+0.4)
- 0.4τ + 0.02 + 0,02(y0+0.4)
Отсюда можно получить: y0(t) и у1(t).
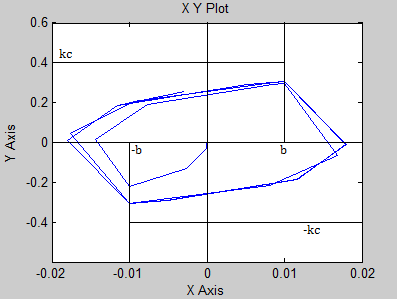
Определим асимптоты и линии переключения на фазовой плоскости:
Линии переключения: x = -0.02 и x = 0.02 (y = b и y = -b)
Асимптоты: y = -0.4 и y = 0.4 (y=-kc и y=kc)
Определим параметры предельного цикла:
Диаграмма точечного преобразования:
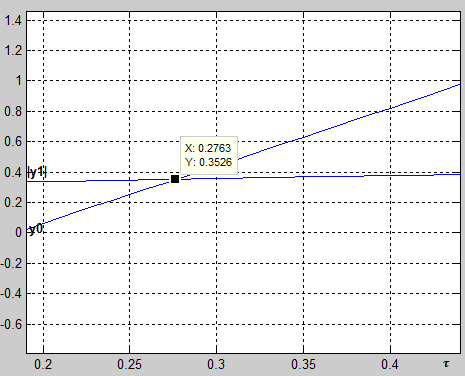
полупериод автоколебаний:

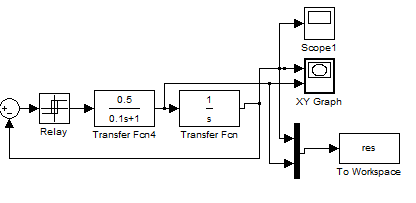
Нарисуем фазовый портрет искомой нелинейной системы. Схема нелинейной системы,
построена в simulink.
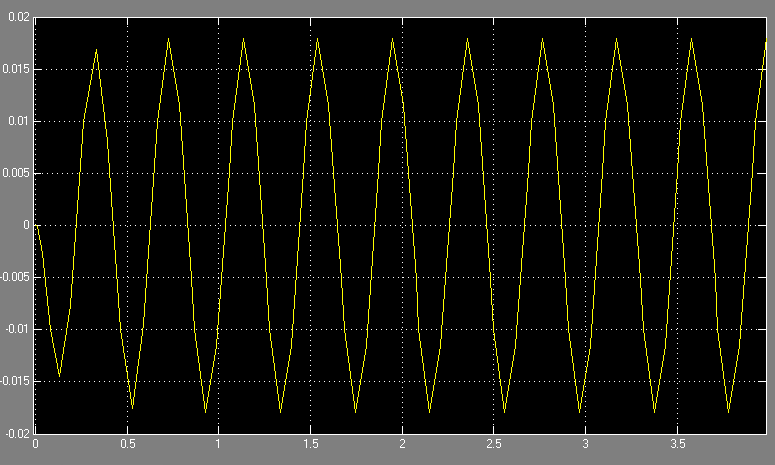
Осциллограммы (по времени и на фазовой плоскости), для начальных условий, внутри
предельного цикла.
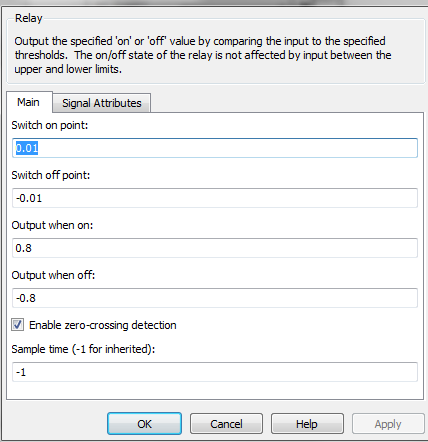
Настройки
реле:
Switch on point -
Порог включения. Значение, при котором
происходит включение реле. (b)
Switch off point -
Порог выключения. Значение, при котором
происходит выключение реле. (-b)
Output when on -
Величина выходного сигнала во включенном
состоянии. (c)
Output when off -
Величина выходного сигнала в выключенном
состоянии. (-c)