1. Анализ стационарной линейной системы автоматического управления при детерминированных воздействиях.
Необходимо выполнить следующие задачи:
• Получить математические модели заданной САУ, используя передаточные функции и уравнения в пространстве состояний.
• Исследовать устойчивость САУ, определить область устойчивости по коэффициенту усиления разомкнутой системы.
• Провести анализ точности работы САУ и скорректировать параметры алгоритма управления.
• Оценить качество управления САУ.
• Провести математическое моделирование САУ в системе МАТLАВ + Simulink.
При математическом моделировании САУ необходимо:
• Построить переходный процесс и определить показатели качества;
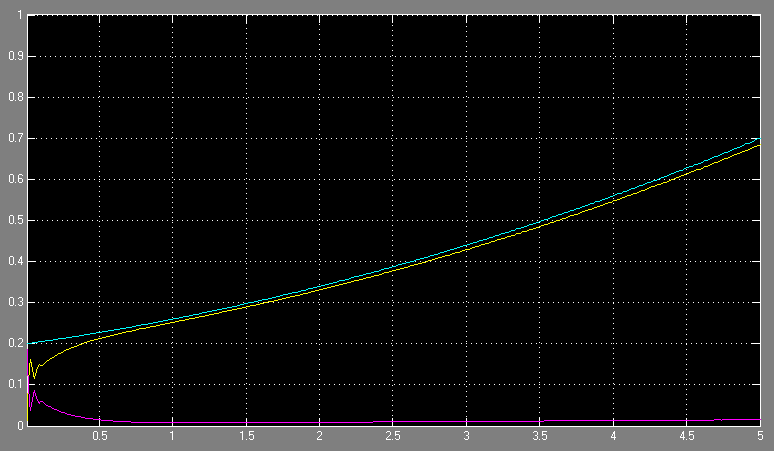
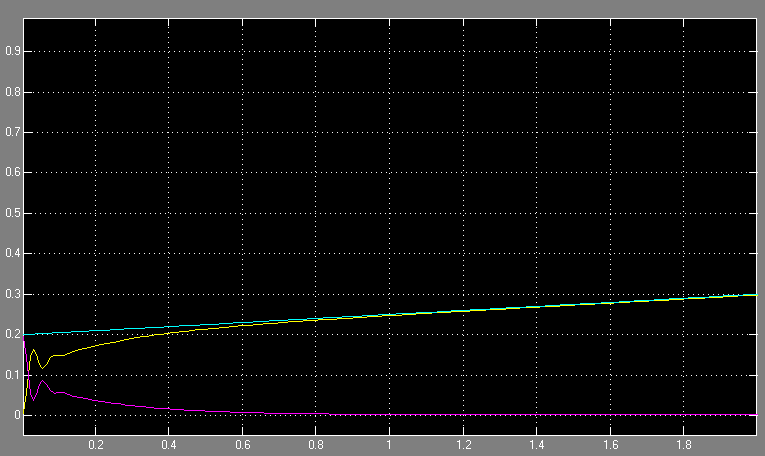
• Проанализировать
точность работы системы (привести
графики входной и выходной координат
и ошибки) при
 и
и
 ;
;
• Проанализировать
работу САУ при
 и
и
 ;
(привести графики входной и выходной
координат и ошибки);
;
(привести графики входной и выходной
координат и ошибки);
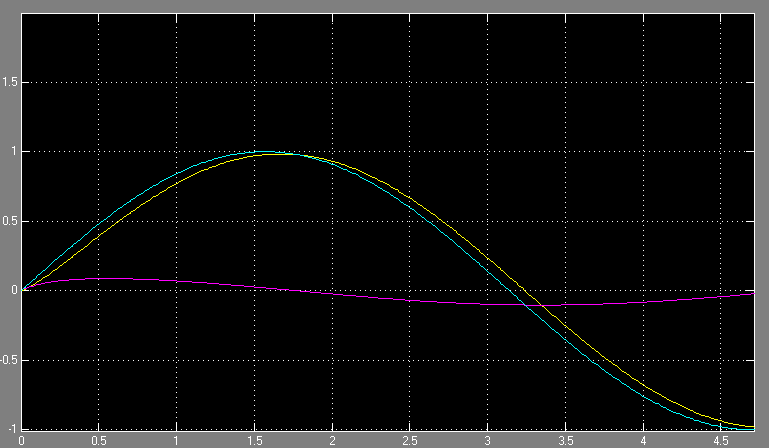
• Проанализировать работу САУ при синусоидальном входном сигнале и .
№ варианта |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2,5 |
20 |
1 |
1,5 |
0,8 |
0,01 |
1.25 |
1,0 |
0,005 |
0,015 |
0,02 |
0 |












 Передаточные
звенья:
Передаточные
звенья:


 Обозначим
числители и знаменатели передаточных
функций каждого звена
Обозначим
числители и знаменатели передаточных
функций каждого звена
 через
через
 и
и
 соответственно, и последовательно
преобразуем многоконтурную САУ в
одноконтурную:
соответственно, и последовательно
преобразуем многоконтурную САУ в
одноконтурную:
Получим
передаточные функции:
разомкнутой САУ



 ,
замкнутой системы по входным воздействиям
,
замкнутой системы по входным воздействиям
 и
и
 ,
по ошибке регулирования относительно
входных воздействий
,
по ошибке регулирования относительно
входных воздействий
 и
и
 :
:

Wraz: 24(
0.125 s + 1) ---------------------------------------------------------- 1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 2.515 s

Wyg: 24(
0.125 s + 1) ---------------------------------------------------------- 1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 5.515 s+24

Weg: 1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 2.515 s ---------------------------------------------------------- 1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 5.515 s+24


Wyz: 0.00006
s^3 + 0.016 s^2 + 0.812 s ---------------------------------------------------------- 1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 5.515 s+24

Wez: -(0.00006
s^3 + 0.016 s^2 + 0.812 s) ---------------------------------------------------------- 1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 5.515 s+24

We2z: 1.5e-006
s^4 + 0.000535 s^3 + 0.0638 s^2 + 6.327 s+24 ---------------------------------------------------------- 1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 5.515 s+24
Используя передаточные функции по ошибкам найдем коэффициенты ошибок:
Weg: с0 = 0 c1 = 0.1048 c2 = -0.0442 ; We2z: c0 = 1 c1 = 0.0338 c2 = -0.0142;
Wez: с0 = 0 c1 = 0.0338 c2 = -0.0169 ;
Выражение для ошибки:

 Запишем
уравнения состояния исходной
многоконтурной САУ:
Запишем
уравнения состояния исходной
многоконтурной САУ:
X3(s)
X4(s)
X1(s)
X2(s)






Исследование
устойчивости САУ
Исследование
устойчивости САУ при помощи алгебраического
критерия Льенара – Шипара
Wyg: 0.125
s + 1 ---------------------------------------------------------- 0.0625e-006
s^4 + 0.00001979 s^3 + 0.00199 s^2 + 0.22979 s+1
Составим
матрицу
Гурвица для
характеристического уравнения
передаточной функции

 :
:
Характеристическое
уравнение:



Коэффициенты нашей
системы
- минор 1-го порядка:
- минор 3-го порядка:
Вывод: Замкнутая
система устойчива согласно
алгебраическому критерию Льенара –
Шипара.
Матрица
Гурвица:


 ;
; .
Её порядок равен четырём, поэтому
определим нечётные миноры:
.
Её порядок равен четырём, поэтому
определим нечётные миноры:

Исследуем
систему на устойчивость по частотному
критерию Найквиста и
проведём анализ устойчивости системы. ЛАЧХ
и ФЧХ
разомкнутой
системы.

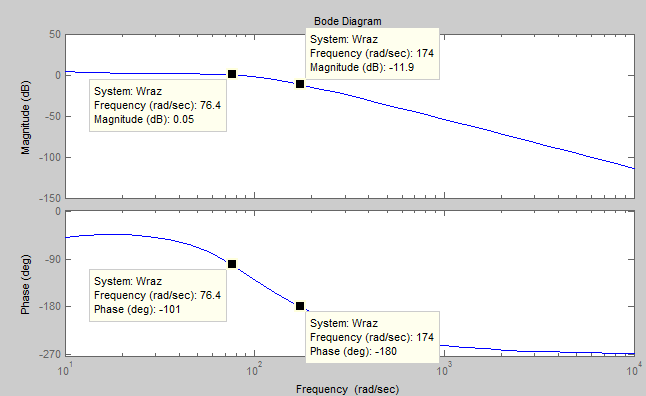
Запасы
устойчивости:

 – запас по амплитуде на частоте wa
= 174 (rad/sec)
– запас по амплитуде на частоте wa
= 174 (rad/sec)
 – запас по фазе на частоте wc
= 76,4 (rad/sec)
– запас по фазе на частоте wc
= 76,4 (rad/sec)
 = 24
= 24
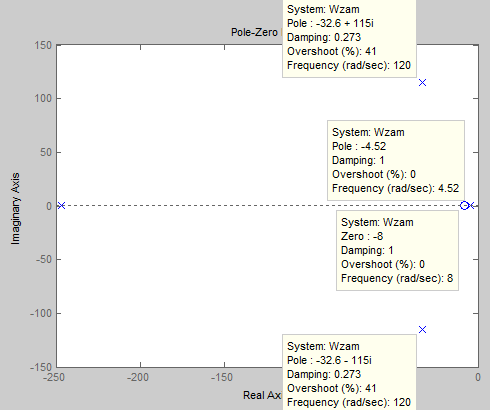
Карта
нулей и полюсов системы:



Переходная
функция системы:



Максимальное значение переходного процесса max_h_t = 0,81
Время регулирования
(момент вхождения кривой в 5% трубку)

Перерегулирование

Декремент затухания
переходной функции:
Вывод: Ближайший
корень к мнимой оси: (-4,52). Так как
передаточная функция системы имеет
нули, то оценка качества системы только
по полюсам может дать существенную
погрешность. Поэтому оценка качества
времени регулирования по полюсам и его реальное значение
и его реальное значение
 не совпадают.
не совпадают.
Моделирование САУ в системе Simulink (+МАТLАВ)
Продемонстрируем
работу САУ при
 и
.
и
.
 и
и
 .
.
Продемонстрируем
работу САУ при
 и
.
и
.