

2. Выполнение лабораторной работы
2.1. Определение времени цикла без учета деятельности оператора
Время цикла без
учета деятельности оператора
![]() определяется
по зависимости (3), а соответствующее
время операции по зависимости (5). За
начало координат примем начальное
положение спредера (рис. 3).
определяется
по зависимости (3), а соответствующее
время операции по зависимости (5). За
начало координат примем начальное
положение спредера (рис. 3).
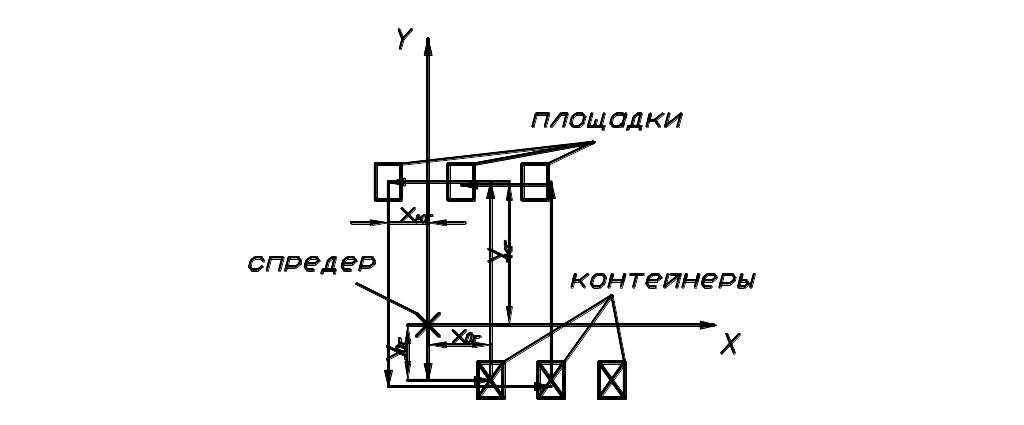
Рис. 3 Схема перемещения контейнеров.
Цикл включает в себя следующие операции:
перемещение спредера вдоль оси OY до контейнера (работа механизма передвижения моста на перемещение
 );
);перемещение спредера вдоль оси OX до контейнера (работа механизма передвижения тележки на перемещение
 );
);спуск спредера на уровень контейнера (работа механизма подъема на перемещение
 );
);наведение спредера и захват контейнера (
 с);
с);подъем контейнера на допустимую высоту перемещения (работа механизма подъема на перемещение
 =
5 м);
=
5 м);перемещение контейнера по горизонтали до места установки (работа механизма передвижения тележки на перемещение
 );
);перемещение контейнера по вертикали до места установки (работа механизма передвижения моста на перемещение
 );
);спуск контейнера (работа механизма подъема на
 );
);наведение контейнера и расцепление спредера ( с);
подъем спредера на допустимую высоту перемещения (работа механизма подъема на перемещение ).
2.2. Определение времени цикла с учетом деятельности оператора
Математическая модель может быть задана различными способами, одним из которых является блок-схема. Наглядность и удобство данного вида описания существенно облегчают создание и использование таких математических моделей. Блок-схема модели выдачи управляющих воздействий оператором мостового крана будет выглядеть следующим образом (рис. 4).
Здесь МТ – механизм передвижения тележки, а величины, принимаемые ими, обозначают: «1» - механизм работает в сторону увеличения соответствующей координаты, «-1» - механизм работает в сторону уменьшения соответствующей координаты, «0» - механизм не работает.
По данной блок-схеме
с учетом перечисленных в пп. 2.1 операций,
составляющих полный цикл работы крана
по перемещению контейнера, строится
блок-схема цикла. Время каждой операции
при этом определяется по зависимости
(6). После чего рассчитывается время
цикла
![]() .
.
Рис. 4 Фрагмент блок-схемы модели выдачи управляющих воздействий.
2.3. Определение времени цикла с помощью имитатора
После запуска программы «Механизатор» и создания файла записи хронометража перегрузочного процесса (запуск «F9») необходимо переместить контейнер соответствующего цвета в указанную в задании позицию (рис. 5). Перегрузка контейнеров осуществляется без совмещения операций, т.е. выполняется одновременно только одна операция: подъем, перемещение тележки, перемещение моста или поворот спредера.
Управление осуществляется следующими клавишами:
стрелка вверх / стрелка вниз (UP/DOWN) – перемещение моста,
стрелка влево / стрелка вправо (LEFT/RIGHT) – перемещение тележки,
страница вверх / страница вниз (PG UP/PG DN) – подъем/спуск,
«Z»/«X» - поворот спредера,
пробел – захват / расцепление.
Рис. 5 Рабочая зона программы имитатора.
В нижней части
экрана приведены координаты центра
спредера, угол его поворота и время с
начала работы программы. Проделав
несколько раз (5-6) перегрузку заданного
контейнера в указанную позицию, определяем
среднее время цикла
![]() .
.