ФЕДЕРАЛЬНОЕ АГЕНТСТВО МОРСКОГО ТРАНСПОРТА
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ВОДНЫХ КОММУНИКАЦИЙ»
КАФЕДРА ПОДЪЕМНО-ТРАНСПОРТНЫХ МАШИН
А.В. Одерышев
Определение времени цикла и составление математической модели управления краном мостового типа
Методические указания по выполнению лабораторной работы №2
Санкт-Петербург
2010
УДК 642.014
ББК 38.54
Рецензент: к.т.н., профессор Е.Н. Андрианов
Составитель: к.т.н., доц. А.В. Одерышев
Математическое моделирование подъемно-транспортных систем: Методические указания по выполнению лабораторной работы «Определение времени цикла и составление математической модели управления краном мостового типа». – СПб.: СПГУВК, 2010. – 17 с.
Изложено содержание лабораторной работы, порядок ее выполнения и оформления отчета.
Предназначено для студентов 2-го курса факультета ПТиЭОБО, обучающихся на дневном и заочном отделении по специальности: 190602.65 «Эксплуатация перегрузочного оборудования портов и транспортных терминалов».
УДК 642.014
ББК 38.54
© Санкт-Петербургский государственный
университет водных коммуникаций, 2010.
Оглавление
ВВЕДЕНИЕ 4
1. СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ 4
1.1. Описание мостового крана 4
1.2. Производительность грузоподъемной машины и время цикла 7
1.3. Характерные ошибки человека-оператора 8
1.4. Расчетная схема крана 9
2. ВЫПОЛНЕНИЕ ЛАБОРАТОРНОЙ РАБОТЫ 10
2.1. Определение времени цикла без учета деятельности оператора 10
2.2. Определение времени цикла с учетом деятельности оператора 11
2.3. Определение времени цикла с помощью имитатора 12
3. ИТОГИ ЛАБОРАТОРНОЙ РАБОТЫ И ОФОРМЛЕНИЕ ОТЧЕТА 13
3.1. Определение производительности крана 13
3.2. Выбор оптимальной стратегии перегрузки и определение минимального времени перегрузки группы контейнеров 14
3.3. Оформление отчета 14
ПРИЛОЖЕНИЯ 17
Введение
Целями выполнения лабораторной работы «Составление математической модели управления краном мостового типа» являются получение навыков создания и использования математических управленческих моделей мостового крана трех типов: детерминированной, стохастической и эвристической, а также оценка влияния управления на характеристики перегрузочного процесса. После сравнения статистических оценок, полученных при обработке результатов моделирования (среднего времени цикла), предлагается дать оценку различным методикам учета деятельности человека-оператора. Также, в процессе выполнения лабораторной работы, студенты ознакомятся с основами теории выбора и осуществят выбор оптимальной стратегии управления.
При этом студенты должны будут разработать концептуальную модель управления мостовым краном, представить математические закономерности выдачи оператором управляющих воздействий, произвести обработку и ввод исходных данных (ИД) для моделирования; выбрать оптимальную стратегию перегрузки и определить время цикла.
Для выполнения лабораторной работы создается бригада из 3-х человек. Отчет оформляется на листах формата А4. Исходные данные приведены в приложении.
1. Составление расчетной схемы
1.1. Описание мостового крана
Мостовой кран (двухбалочный или однобалочный) представляет собой конструкцию из мостовых балок или ферм (называющуюся мостом), передвигающуюся по уложенным на колоннах подкрановым путям. Мостовые краны используются для работы как в закрытых помещениях (рис. 1а), так и на открытом воздухе (рис. 1б). Механизмы кранов имеют индивидуальный электрический привод. Краны оборудуются разнообразными съемными грузозахватными устройствами.
Р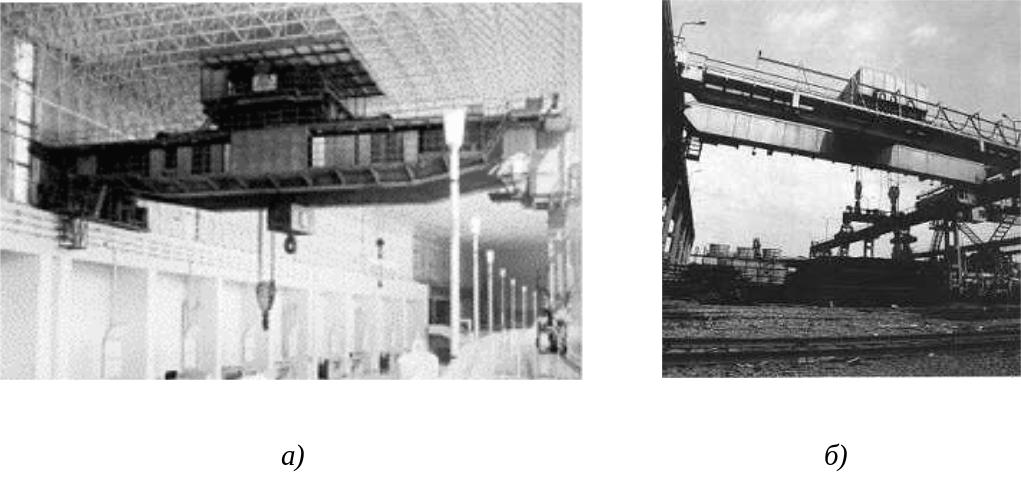 ис.
1 Мостовые краны.
ис.
1 Мостовые краны.
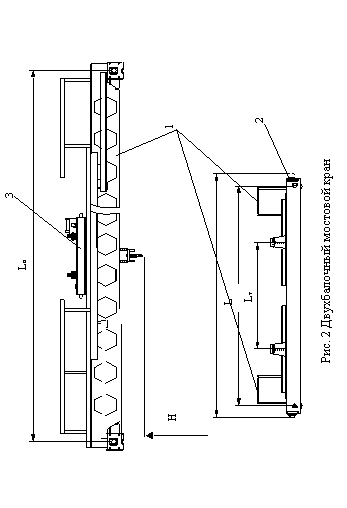
Двухбалочный мостовой кран (рис. 2) представляет собой балочный или ферменный мост 1, состоящий из двух главных балок, соединенных между собой поперечными концевыми балками 2. В них закреплены ходовые колеса, приводимые механизмом передвижения крана (моста). По мосту передвигается тележка 3, оснащенная механизмом подъема. Таким образом, механизмы крана обеспечивают три типа движений: подъем груза, передвижение тележки и передвижение моста, что позволяет полностью обслуживать подкрановую площадь (рабочую зону).
На рисунке обозначены следующие параметры крана:
Lп - пролет моста,
H - высота подъема груза над основанием,
L - расстояние между главными балками,
Lт - ширина колеи тележки.
Также к техническим характеристикам относятся номинальные скорости выполнения рабочих движений (передвижения моста, передвижения тележки, подъема/опускания груза).