

Федеральное агентство по образованию

Государственное образовательное учреждение
высшего профессионального образования
Санкт-Петербургский государственный технологический институт (Технический университет)

Кафедра автоматизации процессов химической промышленности
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ СООТНОШЕНИЯ РАСХОДОВ ЖИДКОСТИ И ГАЗА
Методические указания
к учебно-исследовательской лабораторной работе 6 по курсу
«Автоматика и автоматизация производственных процессов»
Санкт-Петербург
2006
Составители:
канд. техн. наук, ст. преп. А Н. Камразе, канд. техн. наук, доц. Д. В. Беляев (отв. ред.), канд. техн. наук, доц. Ю. В. Якобсон, ст. инж. Н. И. Швецова
Утверждено в качестве методических указаний для студентов дневного и вечернего отделений на заседании учебно-методической комиссии III — VIII факультетов ЛТИ им. Ленсовета 3.02.1984 г.
1. Цель лабораторной работы
Целью работы является изучение методов и приборов; для измерения и автоматического регулирования расхода и давления жидкостей и газов, а также проведение исследований по определению статических характеристик регулирующих органов, исследование характеристик переходных процессов в автоматической системе регулирования (АСР) расхода при различных значениях параметров настройки пропорционально-интегральных (ПИ) –регуляторов.
2. Регулирование соотношения двух расходов
Задача регулирования соотношения двух расходов - поддержание постоянным определенного количественного соотношения между двумя потоками, например, жидкого топлива и воздуха, подаваемых в камеру сгорания, и т. п. При регулировании соотношения один поток является независимым (основным), второй — зависимым от первого. Расход основного потока может изменяться по заданной программе или регулироваться в функции какого-либо параметра, изменяющегося в свою очередь во времени по неизвестному заранее закону.
Значение зависимого расхода регулируется автоматически с помощью специального регулятора соотношения, на вход которого поступает информация о текущих значениях расходов основного и зависимого потоков, таким образом при изменении расхода основного потока между ними сохраняется заданное соотношение.
В данной лабораторной работе основным является расход воздуха, зависимым — расход воды. Расход воздуха и соотношения расходов воздуха и воды регулируются с помощью пневматических ПИ-регуляторов типа ПР3.21 и ПР3.23 соответственно.
Расход воздуха измеряется расходомером переменного перепада давления, в комплект которого входят дисковая диафрагма, дифференциальный манометр с пневматической дистанционной передачей показаний и измерительный прибор ПВ.10.2Э. Расход воды измеряется ротаметром типа РПФ, пневматический сигнал от которого подается на измерительный прибор типа ПВ.10.2Э.
3. Описание пи-закоиа регулирования и влияние параметров настройки регулятора на качество переходных процессов
Автоматическая система регулирования (АСР) (рисунок 1) предназначена для поддержания на заданном значении регулируемой переменной X объекта регулирования О независимо от характера и величины возмущающих воздействий Y.

Рисунок 1 - Структурная схема АСР:
1 — ПИ-регулятор; 2 — элемент сравнения; 3 — пропорциональная часть;
4 — интегральная часть регулятора; ИМ — исполнительный механизм; РО — регулирующий орган (клапан); О - объект; У — возмущающие воздействия
Эта цель достигается изменением с помощью АСР регулирующего воздействия Z. Если регулируемой переменной в технологических объектах являются температура, давление, расход, уровень и т. п., то регулирующим воздействием обычно является расход вещества, для изменения которого предназначены регулирующие органы РО (клапан, вентиль и т. п.). Регулирующие органы указанных типов выполняются в виде дроссельных устройств, изменение проходного сечения которых определяется перемещением μ затвора клапана или вентиля.
Для перемещения затвора регулирующих органов служат исполнительные механизмы (ИМ) (электродвигатель, мембрана, поршень и т. п.), управляемые регулятором.
Промышленные регуляторы независимо от вида используемой энергии (электрические, пневматические или гидравлические) различаются по характеру зависимости своего выходного сигнала от входного, называемой законом регулирования. Для пневматических регуляторов выходным сигналом является давление Рвых, действующее на мембрану исполнительного механизма ИМ, а входным — разность давлений ΔР = РП — Рзд (где Рп — выходное давление измерительного прибора ИП, пропорциональное параметру X; Рзд — давление, устанавливаемое задатчиком ЗД).
Разность давлений ΔР называется рассогласованием. При равенстве заданного Р3д и измеренного Рп значений регулируемой переменной рассогласование ΔР равно нулю.
В ПИ-регуляторах реализуется пропорционально-интегральный закон регулирования, в соответствии с которым выходное давление РВЫХ связано с рассогласованием ΔР зависимостью
![]() .
(1)
.
(1)
Первое слагаемое в правой части этого уравнения представляет собой пропорциональную, а второе — интегральную составляющие закона регулирования. Влияние этих составляющих на выходное давление можно изменять, задавая различные величины значений параметров настроек предела пропорциональности δ и времени интегрирования Ти. В пневматических регуляторах величины δ и Ти изменяются с помощью дросселей (пневматических резисторов).
Предел пропорциональности δ устанавливается двумя дросселями, один из которых δ1 имеет шкалу 2—100%, а другой δ2 — 100—3000%, причем, когда настройка ведется дросселем δ2, дроссель δ1 должен стоять на отметке 100%.
Значение времени интегрирования Ти устанавливается дросселем, позволяющим изменять его значение в диапазоне от 0,05 до 100 мин (на отметке шкалы Ти = ∞).
При установке значения Ти = ∞ второе слагаемое в законе регулирования (1) обращается в нуль, и регулятор становится пропорциональным, т. е. его выходной сигнал Рвых пропорционален входному ΔР. Для такого регулятора характерно наличие статической ошибки, т. е. в установившемся состоянии, когда воздействие регулятора на объект не изменяется (Pвых = const), рассогласование ΔР полностью не устраняется.
Для устранения статической ошибки (ΔР = 0) в законе регулирования (1) должна присутствовать интегральная составляющая, что обеспечивается при Ти ≠ ∞.
В пневматических ПИ-регуляторах величина заданного значения параметра может быть установлена как с помощью задатчика, так и от любого внешнего источника давления. Кроме того, в некоторых регуляторах имеется возможность менять соотношение между заданным и измеренным значениями параметра с помощью дополнительных дросселей K1 и К2. Диапазон настройки соотношения можно изменять в пределах от 5 : 1 (К1 = 5:1, К2 = 1:1) до 1 : 5 (К1 = 1:1, К2 = 5:1), т. е. в 25 раз.
При равенстве установок на дросселях, например, К1 = 3:1 и К2 = 3:1, регулятор будет поддерживать одинаковые значения заданного и измеренного значений параметра.
Поскольку значения предела пропорциональности δ к времени интегрирования Ти являются параметрами настройки регулятора, то соотношение их величин определяет качество регулирования, которое обычно оценивается по переходному процессу, т. е. по кривой изменения регулируемой переменной во времени.
Переходный процесс возникает при изменении возмущений Y, действующих на объект регулирования, или при изменении задания Рзд (рисунок 1). Примеры апериодических и колебательных переходных процессов, которые могут наблюдаться в обоих случаях, приведены на рисунках 2, 3.
В идеальной АСР величины регулируемой переменной Рп и заданного ее значения Рзд должны были бы все время практически совпадать. Однако идеальные переходные процессы фактически недостижимы. В реальной АСР по отклонению переходного процесса от идеального можно судить о качестве ее работы. Для количественной оценки функционирования АСР служат показатели качества регулирования.
Наиболее универсальным показателем качества регулирования является абсолютная величина площади, ограниченной кривой переходного процесса (на рисунках 2, 3 заштрихована), которая характеризует отклонение параметра от заданного значения. По технологическим соображениям за показатель качества регулирования принимается время переходного процесса tр или максимальная величина рассогласования в переходном процессе ΔРмакс (так называемая динамическая ошибка). Естественно, чем данные показатели меньше, тем ближе имеющаяся АСР к идеальной.

Рисунок 2 – Переходные процессы Рисунок 3 – Переходные процессы
при изменении возмущений при изменении задания
Качество периодического переходного процесса оценивается по степени затухания ψ, которое определяется как отношение разницы между максимумами амплитуд первого ΔР1 и третьего ΔР3 колебаний к ΔР1, т. е.
![]() .
(2)
.
(2)
Для апериодических процессов ψ = l. При ψ = 0 система находится на границе устойчивости (режим незатухающих колебаний).
На свойства любой АСР, а, следовательно, на качество переходных процессов можно влиять, изменяя характеристики регулятора, т. е. параметры его настройки. Для ПИ-регуляторов с уменьшением δ (рисунок 4) переходный процесс вначале апериодический и растянутый во времени (см. рисунок 4а), постепенно уменьшается (см. рисунок 4б) по амплитуде отклонения и по продолжительности, а затем переходит к затухающему колебательному виду (см. рисунок 4в). При дальнейшем уменьшении δ колебательный переходный процесс начинает растягиваться (см. рисунок 4г) и при ψ = 0 и tP = ∞ имеет вид незатухающих колебаний (см. рисунок 4д).
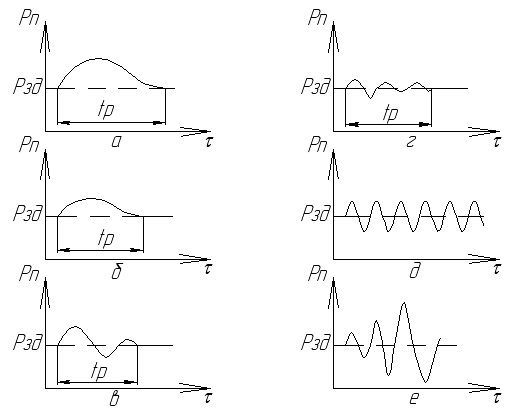
Рисунок 4 – Кривые переходных процессов
Возникновение незатухающих колебаний свидетельствует о достижении границы устойчивости АСР. Дальнейшее уменьшение δ выводит АСР за границу устойчивости, что проявляется в самопроизвольном нарастании амплитуды колебаний (см. рисунок 4е). При этом все показатели качества регулирования теряют смысл.
С уменьшением значения времени интегрирования Ти вид переходных процессов и показатели их качества изменяются примерно так же, как и при уменьшении δ. Хотя при введении интегральной составляющей статическая ошибка исчезает, но при этом граница устойчивости достигается при больших значениях δ (см. рисунок 2, 3, 4).
Таким образом, статическая ошибка при уменьшении предела пропорциональности уменьшается, а при введении интегральной составляющей исчезает совсем. Но при этом уменьшается запас устойчивости системы.