

Содержание графической части проекта.
Графическая часть курсового проекта состоит из трёх листов формата А1.
На первом листе выполняются:
Планы положений механизма для 12 равноотстоящих положений кривошипа.
Планы скоростей для каждого положения механизма.
Индикаторная диаграмма.
График приведённого момента сил.
График приведённого момента инерции.
График работы движущих сил и сил сопротивления.
График изменения кинетической энергии.
Диаграмма «энергия-масса».
График угловой скорости.
На втором листе выполняются:
Схема механизма в заданном положении.
План скоростей и план ускорений.
Группы Ассура и начальное звено.
Планы сил и соответствующие им уравнения равновесия.
На третьем листе выполняются:
Схема планетарного редуктора в двух проекциях, картина распределения скоростей и диаграмма угловых скоростей.
Построение профиля кулачка и график углов давления.
или:
2. Эвольвентное зацепление и таблица параметров зацепления.
2. Геометрический синтез и кинематическое исследование основного механизма рабочей машины.
2.1. Цель, задачи и методы исследования.
Цель и задачи раздела заключаются в привитии практических навыков использования общих методов анализа и синтеза на конкретных примерах при выявлении строения механизмов, определении размеров звеньев по основным и дополнительным условиям синтеза и определении кинематических параметров , необходимых для динамического исследования и силового расчета рабочей машины.
Исследования раздела выполняются современным графическими и аналитическими методами .
2.2. Структурный анализ механизмов.
Структурный анализ позволяет определить, каким образом звенья соединены между собой, какие кинематические пары они составляют, характер относительного движения звеньев в кинематических парах, процесс передачи движения от одного звена к другому, число степеней свободы и класс механизма.
Число степеней свободы плоских механизмов определяется по формуле:
![]() (2.1.)
(2.1.)
где
![]() – число подвижных звеньев;
– число подвижных звеньев;
![]() – число пар
пятого класса;
– число пар
пятого класса;
![]() – число пар
четвертого класса.
– число пар
четвертого класса.
Согласно общему принципу образования механизмов путем наслоения структурных групп любой механизм состоит из начального звена со стойкой и структурных групп Ассура.
Структурной группой называется кинематическая цепь, число степеней свободы которой равно нулю относительно элементов ее внешних пар, причем группа не должна распадаться на более простые кинематические цепи, отвечающие этому условию.
Группы Ассура обладают кинематической и кинетостатической определимостью.
Номер класса группы определятся числом кинематических пар, входящих в наиболее сложный замкнутый контур, образованный внутренними кинематическими парами.
Число внешних кинематических пар определяет порядок группы.
Класс механизма определяется высшим классом группы, входящей в механизм.
Структурный анализ механизма проводится с целью определения метода кинематического и силового исследования механизма.
Пример. Произвести структурный анализ механизма, схема которого изображена на рис. (2.1.)
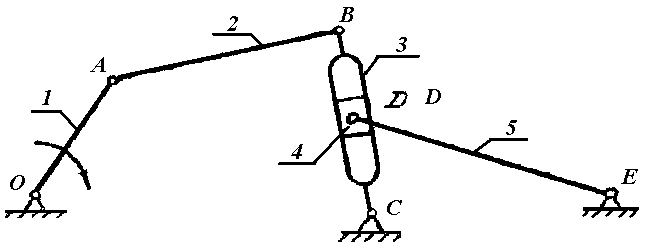
Рис. 2.1.
1. Определяем число степеней свободы механизма по формуле:
![]()
Здесь
![]() =5
;
=7 ;
=0
.
=5
;
=7 ;
=0
.
Из семи пар пятого класса одна поступательная, образованная звеньями 3-4, и шесть вращательных, образованных звеньями 0-1, 1-2, 2-3, 4-5, 0-3, 0-5 (0 - номер стойки).
Данный механизм имеет одно начальное звено-кривошип ОА.
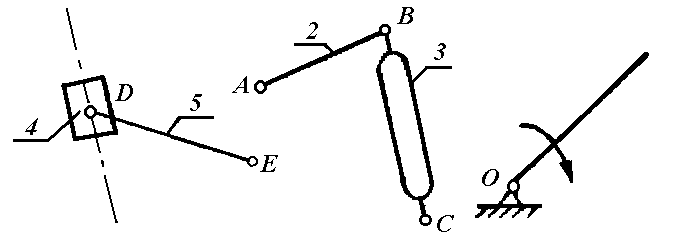
2. Выделим структурные группы Ассура, начиная с наиболее удаленной от начального звена.
Структурные группы и начальное звено со стойкой показаны на рис. 2.2.
Структурная формула группы Ассура: W = 3n – 2p5 = 0
Механизм состоит из двух двухповодковых групп Ассура второго класса и начального звена со стойкой.
Так как в его структуре нет групп более высокого класса, то он относится ко второму классу.
 n=2,
p5=3
n=2, p5=3
n=1, p5=1
n=2,
p5=3
n=2, p5=3
n=1, p5=1
W = 3x2 – 2x3 = 0 W = 3x1 – 2x1 = 1
Двухповодковые группы Ассура 2-го класса Начальный механизм
1-го класса
Рис. 2.2.