

3.3.4. Определение движущего момента, приведенного к валу кривошипа.
Для определения
![]() продифференцируем график Ag
на рис.3.3б.
продифференцируем график Ag
на рис.3.3б.
Для этого из точки
Р на рис.3.3а проведем прямую, параллельную
графику Ag
на рис.3.3б.
Она отсекает на оси YM
отрезок
![]() ,
пропорциональный
,
пропорциональный
![]() :
:
![]() (3.17)
(3.17)
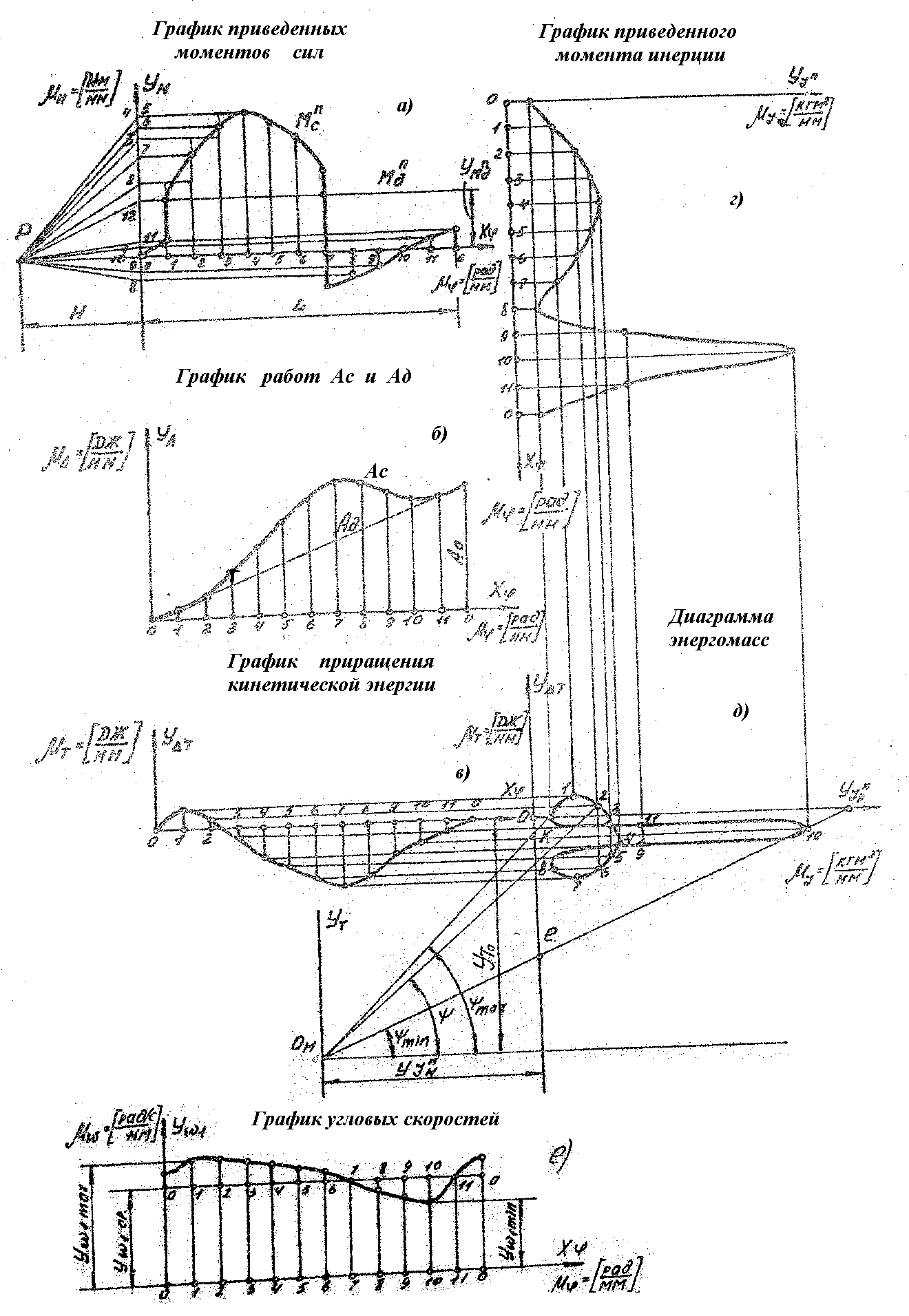
Рис. 3.3. Графоаналитический метод Виттенбауэра решения уравнения движения машины.
3.3.5. Построение графика приращения кинетической энергии.
Согласно теореме об изменении кинетической энергии работа внешних сил за определенный промежуток времени равна приращению кинетической энергии за тот же промежуток времени.
Работу внешних сил представим как разность работ сил движущих и сил сопротивления.
Тогда имеем
![]() ,
(3.18)
,
(3.18)
где
![]() - приращение кинетической энергии.
- приращение кинетической энергии.
Приращение
кинетической энергии
![]() определяем графически, вычитая из
ординат Ag
ординаты
графика Ас
.
определяем графически, вычитая из
ординат Ag
ординаты
графика Ас
.
На участках, где
по абсолютной величине
![]() ,
,
![]() и, наоборот, на участках, где
и, наоборот, на участках, где
![]() ,
,
![]() ,
как показано на графиках 3.3б и 3.3в .
,
как показано на графиках 3.3б и 3.3в .
3.3.6. Построение графика приведенного момента инерции.
Приведенный момент инерции вычисляем по формуле
 (3.19)
(3.19)
В рассматриваемом примере массой и моментом инерции ползуна пренебрегаем.
В формуле (3.19)
![]() - приведенный момент инерции звеньев,
связанных с валом кривошипа зубчатыми
передачами.
- приведенный момент инерции звеньев,
связанных с валом кривошипа зубчатыми
передачами.
Величины
![]() берем из табл. 2.1
берем из табл. 2.1
Результаты вычислений сводим в табл.3.2 .
По вычисленным
значениям строим график Jn
(рис.3.3г),
располагая ось
![]() вертикально.
Ординаты графика
вертикально.
Ординаты графика
![]() вычисляем по формуле
вычисляем по формуле
![]() (мм),
(3.20)
(мм),
(3.20)
где
![]()
![]() - масштабный коэффициент графика Jn
.
- масштабный коэффициент графика Jn
.
3.3.7. Построение диаграммы энергомасс и определение приведенного момента инерции маховика.
Из
графиков Jn
и
графически исключаем параметр
![]() путем
нахождения пересечения горизонталей,
проведенных из точек графика
(рис.3.3,в) с вертикалями, проведенными
из одноименных точек графика Jn
(рис3.3,г). В результате получили график
зависимости приращения кинетической
энергии
от приведенного момента инерции Jn
(3.3,д), который называют диаграммой
энергомасс или диаграммой Виттенбауэра.
путем
нахождения пересечения горизонталей,
проведенных из точек графика
(рис.3.3,в) с вертикалями, проведенными
из одноименных точек графика Jn
(рис3.3,г). В результате получили график
зависимости приращения кинетической
энергии
от приведенного момента инерции Jn
(3.3,д), который называют диаграммой
энергомасс или диаграммой Виттенбауэра.
По заданным
коэффициенту неравномерности движения
машины
![]() и средней угловой скорости начального
звена
и средней угловой скорости начального
звена
![]() определяем углы
определяем углы
![]() из соотношений:
из соотношений:
![]() ;
(3.21)
;
(3.21)
![]() ;
(3.22)
;
(3.22)
Проводим касательные
к диаграмме энергомасс под углами
к оси
![]() .
Пересечение касательных определяет
новое начало координат ОМ
. Расстояние
.
Пересечение касательных определяет
новое начало координат ОМ
. Расстояние
![]() определяем
искомое значение приведенного момента
инерции маховика
определяем
искомое значение приведенного момента
инерции маховика
![]() [кгм2],
(3.23)
[кгм2],
(3.23)
а расстояние
![]() - начальную кинетическую энергию
- начальную кинетическую энергию
![]() (Дж).
(3.24)
(Дж).
(3.24)
Если точка ОМ
выходит за пределы чертежа ( когда углы
близки 00),
то замеряем отрезок kl
на оси
![]() и Jn
вычисляем по формуле
и Jn
вычисляем по формуле
![]() (кгм2).
(3.25)
(кгм2).
(3.25)
При углах , близких к 900, касательные могут не пересечь ось в пределах чертежа. Тогда отрезок (kl) вычисляем по формуле
![]() (3.26)
(3.26)
OP и Oq - расстояния от центра О до точек Р и q пересечения касательных с осью .