

6. 2. 2. Исходные данные для расчета
Исходными данными для расчета преобразователя являются следующие параметры:
- требуемая относительная чувствительность преобразователя δS, мм-1
- сопротивление катушки Z, Ом;
- частота питающего
напряжения
![]() ,
Гц;
,
Гц;
- допускаемая
погрешность от нелинейности характеристики
![]() ,
мкм;
,
мкм;
- заданный диапазон измерения Д, мм.
Конструктивные размеры магнитопровода преобразователя показаны на рисунке 6.3.
- длина катушки lk, мм ;
- длина сердечника lc = 1,1lk, мм;
- радиус катушки R, мм;
- радиус сердечника r , мм;
- добротность катушки Q.
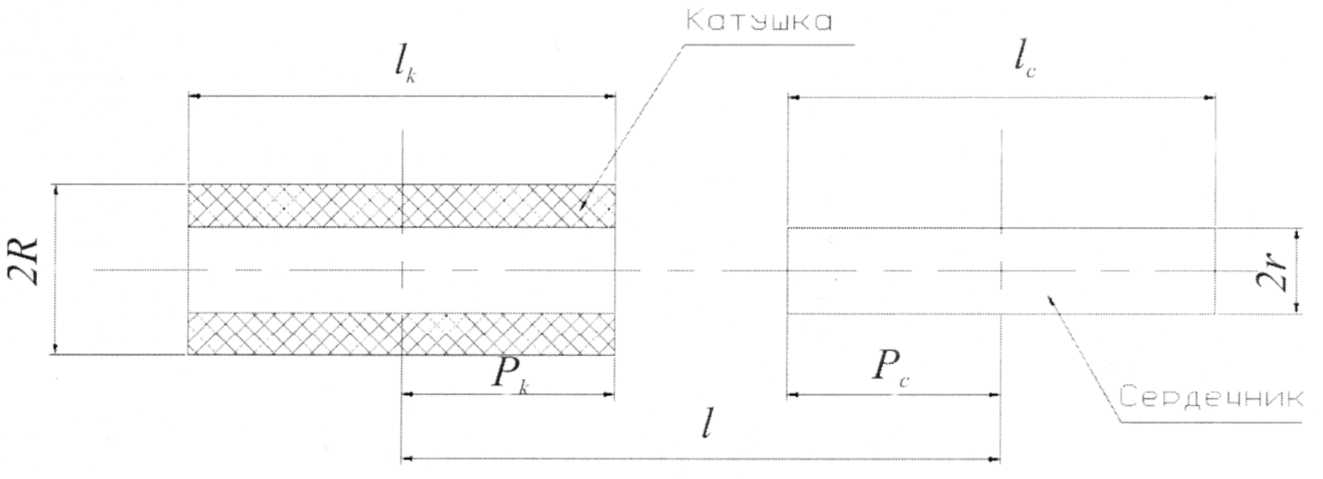
Рисунок 6.3 – Конструктивные размеры магнитопровода
Добротность катушки преобразователя характеризует величину потерь энергии в ней на перемагничивание и вихревые потоки и определяются из выражения.
Q=f L/Rполн, (6.2)
где Rполн
= Rпр
+Rэ
– полное
сопротивление катушки преобразователя;
Rпр
– сопротивление
провода катушки;
 – сопротивление в схеме замещения
индуктивного преобразователя (рисунок
6.4), на котором должна расходоваться
мощность Р,
равная мощности потерь в сердечнике;
– сопротивление в схеме замещения
индуктивного преобразователя (рисунок
6.4), на котором должна расходоваться
мощность Р,
равная мощности потерь в сердечнике;
 –
постоянная величина для конкретного
преобразователя, не зависящая от величины
зазора; Rмс
– магнитное
сопротивление сердечника; Rмз
– магнитное сопротивление воздушного
зазора; σП
- коэффициент
потерь на перемагничивание; σВ
– коэффициент
потерь на вихревые токи.
–
постоянная величина для конкретного
преобразователя, не зависящая от величины
зазора; Rмс
– магнитное
сопротивление сердечника; Rмз
– магнитное сопротивление воздушного
зазора; σП
- коэффициент
потерь на перемагничивание; σВ
– коэффициент
потерь на вихревые токи.
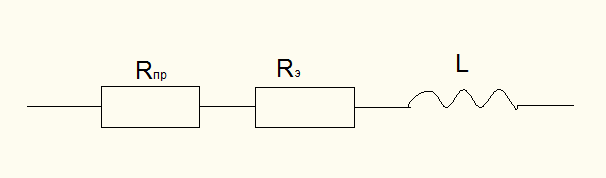
Рисунок 6.4 – Схема замещения индуктивного преобразователя
6.2.3. Методика расчета
1. Определение относительной максимальной чувствительности.
Относительная
чувствительность
![]() определяется как
отношение
определяется как
отношение
![]() ,
(6.3)
,
(6.3)
где
 Гн/м – абсолютная чувствительность; ΔL
– изменение индуктивности катушки, Гн;
Д
– диапазон измерений, м.
Гн/м – абсолютная чувствительность; ΔL
– изменение индуктивности катушки, Гн;
Д
– диапазон измерений, м.
Значение максимальной чувствительности определяется по формуле
 , (6.4)
, (6.4)
где Pc = lc/2; Pк = lк /2.
Поскольку преобразователь дифференциальный, то δSmax равна
δSmax. диф. = 2δSmax (6.5)
Должно выполняться условие
δSmax. диф. ≥ δSТ
2. Определение требуемой индуктивности преобразователя
 . (6.6)
. (6.6)
3. Расчет числа витков ω катушки
 , (6.7)
, (6.7)
где μо = 1,26·10-6 Гн/м – магнитная постоянная μс = 44 – относительная магнитная проницаемость.
4. Расчет на вместимость количества витков проволоки заданного диаметра d в принятые габариты катушки
 , (6.8)
, (6.8)
где K = 0,7…0,9 – коэффициент заполнения катушки; d – диаметр провода.
Если расчетное
число витков не помещается в заданные
габаритные размеры катушки, т.е.
![]() ,
то можно увеличить частоту питающего
напряжения f,
а затем пересчитать требуемую индуктивность
L
по формуле 6.4 и найти новое число витков
катушки (формула 6.5).
,
то можно увеличить частоту питающего
напряжения f,
а затем пересчитать требуемую индуктивность
L
по формуле 6.4 и найти новое число витков
катушки (формула 6.5).
5. Определение индуктивности катушки в среднем положении сердечника
![]() , (6.9)
, (6.9)
где
 .
.
6. Статическая характеристика преобразователя
Зависимость индуктивности L от параметра m имеет вид
![]() , (6.10)
, (6.10)
где
![]() ; l
= 1,1;
; l
= 1,1;
![]() – перемещение сердечника;
– перемещение сердечника;
![]() ;
;
![]() .
.
Выражение 6.10 с учетом можно переписать в виде
 .
(6.11)
.
(6.11)
Для нахождения
точек построения статической
характеристики, как зависимости
![]() необходимо задаться рядом значений от
0 до
необходимо задаться рядом значений от
0 до
![]() с
шагом 0,5 мм или 1 мм.
с
шагом 0,5 мм или 1 мм.
7. Определение максимальной абсолютной чувствительности преобразователя.
![]() .
(6.12)
.
(6.12)
Значение
![]() и
и
![]() определены в пункте 1 и 5. Полученное
значение
определены в пункте 1 и 5. Полученное
значение
![]() определено в
зависимости от перемещения сердечника
определено в
зависимости от перемещения сердечника
![]() .
.
8. Определение
чувствительности![]() в функции от параметра
.
в функции от параметра
.
![]() .
(6.13)
.
(6.13)
9. Уравнение линеаризирующей прямой для функции L = f(m)
 . (6.14)
. (6.14)
Задаваясь рядом значений m получим точки, через которые проведем линеаризирующую прямую.
10. Определение погрешности измерения от нелинейности статической характеристики.
 . (6.15)
. (6.15)
После подстановки
![]() согласно 6.14 в
формулу 6.15 имеем
согласно 6.14 в
формулу 6.15 имеем
`
 (6.16)
(6.16)