

10) Закон всемирного тяготения. Сила тяжести. Вес тела. Невесомость.
Всемирное тяготение Исаак Ньютон выдвинул предположение, что между любыми телами в природе существуют силы взаимного притяжения. Эти силы называют силами гравитации, или всемирного тяготения. Сила всемирного тяготения проявляется в Космосе, Солнечной системе и на Земле.
Ньютон
обобщил
законы движения небесных тел и
выяснил,
что
сила F равна:  массы взаимодействующих тел, R —
расстояние между ними, G — коэффициент
пропорциональности, который называется
гравитационной постоянной. Закон
всемирного тяготения звучит так:
между
любыми материальными точками существует
сила взаимного притяжения, прямо
пропорциональная произведению их масс
и обратно пропорциональная квадрату
расстояния между ними, действующая по
линии, соединяющей эти точки.
Грав.пост.
:Численное значение:
массы взаимодействующих тел, R —
расстояние между ними, G — коэффициент
пропорциональности, который называется
гравитационной постоянной. Закон
всемирного тяготения звучит так:
между
любыми материальными точками существует
сила взаимного притяжения, прямо
пропорциональная произведению их масс
и обратно пропорциональная квадрату
расстояния между ними, действующая по
линии, соединяющей эти точки.
Грав.пост.
:Численное значение: ![]() Силы
всемирного тяготения действуют между
любыми телами в природе, но ощутимыми
они становятся при больших массах.
Силы
всемирного тяготения действуют между
любыми телами в природе, но ощутимыми
они становятся при больших массах.
Сила тяжести
Частным
видом силы всемирного тяготения является
сила
притяжения тел к Земле.
Эту силу называют силой
тяжести.
Под действием этой силы все тела
приобретают ускорение свободного
падения. В соответствии со вторым законом
Ньютона g
= Ft*m
следовательно, Ft
= mg.
Сила тяжести всегда направлена к центру
Земли. В зависимости от высоты h над
поверхностью Земли и географической
широты положения тела ускорение
свободного падения приобретает различные
значения. На поверхности Земли и в
средних широтах ускорение
свободного падения равно 9,831 м/с2.
Вес
тела
В
технике и быту широко используется
понятие веса тела. Весом
тела называют силу, с которой тело давит
на опору или подвес в результате
гравитационного притяжения к планете.
Вес
тела обозначается Р.
Единица веса — Н. Так как вес равен силе,
с которой тело действует на опору, то в
соответствии с третьим законом Ньютона
по величине вес
тела равен силе реакции опоры. Поэтому,
чтобы найти вес тела, необходимо
определить, чему равна сила реакции
опоры.при движении вертикально вверх
с ускорением вес тела увеличивается и
находится по формуле Р
= m(g
+ a).
Увеличение веса тела, вызванное ускоренным
движением опоры или подвеса, называют
перегрузкой.
Действие перегрузки испытывают на себе
космонавты как при взлете космической
ракеты , водители автомобилей при резком
торможении.
Если тело движется вниз по вертикали,
то с помощью аналогичных рассуждений
получаем![]() (не
важно)
вес
при движении по вертикали с ускорением
будет-меньше силы тяжести
Если
тело свободно падает, то в этом случае
P
= (g-
g)m
= 0.
(не
важно)
вес
при движении по вертикали с ускорением
будет-меньше силы тяжести
Если
тело свободно падает, то в этом случае
P
= (g-
g)m
= 0.
(РЕБЯТА! Убедительная просьба, для вас лучше будет . НЕ СМЕЙТЕ говорить , что вес тела – это масса.)
Невесомость Состояние тела, в котором его вес равен нулю, называют невесомостью. Состояние невесомости наблюдается в самолете или космическом корабле при движении с ускорением свободного падения независимо от направления и значения скорости их движения. За пределами земной атмосферы при выключении реактивных двигателей на космический корабль действует только сила всемирного тяготения. Под действием этой силы космический корабль и все тела, находящиеся в нем, движутся с одинаковым ускорением, поэтому в корабле наблюдается состояние невесомости.
11.Упругие силы
Силы упругости
При деформациях твердого тела его частицы (атомы, молекулы, ионы), находящиеся в узлах кристаллической решетки, смещаются из своих положений равновесия. Этому смещению противодействуют силы взаимодействия между частицами твердого тела, удерживающие эти частицы на определенном расстоянии друг от друга. Поэтому при любом виде упругой деформации в теле возникают внутренние силы, препятствующие его деформации.
Силы, возникающие в теле при его упругой деформации и направленные против направления смещения частиц тела, вызываемого деформацией, называют силами упругости. Силы упругости действуют в любом сечении деформированного тела, а также в месте его контакта с телом, вызывающим деформации. В случае одностороннего растяжения или сжатия сила упругости направлена вдоль прямой, по которой действует внешняя сила, вызывающая деформацию тела, противоположно направлению этой силы и перпендикулярно поверхности тела. Природа упругих сил электрическая.
ОБЪЁМНАЯ ДЕФОРМАЦИЯ:При деформации
объем тела изменяется. Рассмотрим
бесконечно малый параллелепипед объемом![]() С точностью до бесконечно малых высшего
порядка можно считать, что изменение
объема обусловлено только изменением
длины ребер и не связано с изменением
углов сдвига.
С точностью до бесконечно малых высшего
порядка можно считать, что изменение
объема обусловлено только изменением
длины ребер и не связано с изменением
углов сдвига.
ДЕФОРМАЦИЯ СДВИГА:При деформации сдвига происходит сдвиг атомных плоскостей относительно других атомных плоскостей.
Относительная деформация сдвига
определяется по формуле:
![]() ,
,
где Δx — абсолютный сдвиг параллельных
слоёв тела относительно друг друга; l —
расстояние между слоями (![]() для малых углов )
для малых углов )
Закон Гука для упругих деформаций
Закон Гука
Связь между силой упругости и упругой деформацией тела (при малых деформациях) была экспериментально установлена современником Ньютона английским физиком Гуком. Математическое выражение закона Гука для деформации одностороннего растяжения (сжатия) имеет вид f=-kx:где f - сила упругости; х - удлинение (деформация) тела; k - коэффициент пропорциональности, зависящий от размеров и материала тела, называемый жесткостью. Единица жесткости в СИ - ньютон на метр (Н/м).
Закон Гука для одностороннего растяжения (сжатия) формулируют так: сила упругости, возникающая при деформации тела, пропорциональна удлинению этого тела.
Тангенциальное и нормальное напряжение
Механическое напряжение — это мера внутренних сил, возникающих в деформируемом теле под влиянием различных факторов. Механическое напряжение в точке тела определяется как отношение внутренней силы к единице площади в данной точке рассматриваемого сечения.
Напряжения являются результатом взаимодействия частиц тела при его нагружении. Внешние силы стремятся изменить взаимное расположение частиц, а возникающие при этом напряжения препятствуют смещению частиц, ограничивая его в большинстве случаев некоторой малой величиной.
![]()
Q — механическое напряжение.
F — сила, возникшая в теле при деформации.
S — площадь.
Различают две составляющие вектора механического напряжения:
Нормальное механическое напряжение — приложено на единичную площадку сечения, по нормали к сечению (обозначается σ).
Касательное механическое напряжение — приложено на единичную площадку сечения, в плоскости сечения по касательной (обозначается τ).
Совокупность напряжений, действующих по различным площадкам, проведенным через данную точку, называется напряженным состоянием в точке.
В системе СИ механическое напряжение измеряется в паскалях.
13.Работа- скалярная физическая величина, равная произведению модуля силы на модуль перемещения и на косинус угла между ними.
![]()
Где ![]() -
проекция силы
-
проекция силы ![]() на направление перемещения
на направление перемещения ![]() .
.
Мощность--скалярная физическая величина, численно равная отношению работы, совершаемой за некоторый промежуток времени, к этому промежутку времени.
![]()
Кинетическая энергия-скалярная физическая величина, численно равная половине произведения массы частицы на квадрат модуля ее скорости.
![]()
![]() (через импульс)
(через импульс)
Кинетическая энергия системы отсчета равна сумме кинетических энергий входящих в нее частиц.
![]()
где![]() -масса системы
-масса системы
![]() – скорость i-ой частицы
относительно центра масс,
– скорость i-ой частицы
относительно центра масс, ![]()
Теорема о кинетической энергии:
Работа равнодействующей силы равна превращению кинетической энергии тела.
![]()
14.
Консервативные силы. Связь консервативных сил с потенциальной энергией. Потенциальная энергия силы тяжести и упругой деформации.
Сила, действующая на материальную точку, называется консервативной (потенциальной), если работа этой силы зависит только от начального и конечного положений точки. Работа консервативной силы не зависит ни от вида траектории, ни от закона движения материальной точки по траектории
Работа консервативных сил равна убыли потенциальной энергии
Если в системе действуют консервативные силы, то система обладает
потенциальной энергией
поэтому консервативные силы называют потенциальными
А = Еп1 – Еп2 = -ΔЕпот
Потенциальная энергия упруго деформированного тела. Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
![]() .
.
Потенциальная энергия упруго деформированного тела — это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальная энергия поднятого над Землей тела — это энергия взаимодействия тела и Земли гравитационными силами.
Ep=mgh Потенциальная энергия тела в поле силы тяжести.
15)Импульс системы частиц. Теорема об изменении импульса системы частиц
Импульсом системы частиц называется суммарный импульс всех частиц системы, т.е.
![]()
![]() . (4.6)
. (4.6)
Используя определение центра инерции системы (4.4) и его скорости, выражение для импульса системы частиц можно преобразовать к виду
![]() , (4.7)
, (4.7)
где
![]() -
масса системы и
-
масса системы и
![]() -
скорость центра инерции. Дифференцируя
(4.7) по времени и используя (4.5), получим
теорему об изменении импульса системы
частиц:
-
скорость центра инерции. Дифференцируя
(4.7) по времени и используя (4.5), получим
теорему об изменении импульса системы
частиц:
![]() (4.8)
(4.8)
- скорость изменения импульса системы частиц равна главному вектору внешних сил, действующих на частицы системы.
Если главный вектор внешних сил равен нулю, то импульс системы частиц сохраняется (закон сохранения импульса системы частиц).
Закон сохранения импульса для системы частиц.
Если на систему взаимодействия частиц не действуют никакие внешние силы F, или эта результирующая сила = 0, тогда суммарный импульс такой системы не будет зависеть от времени
16. Упругое и неупругое соударение тел
Удар упругий- это такой удар при котором механическая энергия взаимодействия тел не сохраняется.
Неупругий удар- когда часть механической энергии переходит в др. виды энергии. (Например в тепловую).
17.Центр масс – геометрическая точка, характеризующая движение тела или системы частиц как целого.
Движение твёрдого тела можно рассматривать как суперпозицию движения центра масс и вращательного движения тела вокруг его центра масс. Центр масс при этом движется так же, как двигалось бы тело с такой же массой, но бесконечно малыми размерами (материальная точка). Для описания этого движения применимы все законы Ньютона. Во многих случаях можно вообще не учитывать размеры и форму тела и рассматривать только движение его центра масс.
![]() —
радиус-вектор центра масс,
—
радиус-вектор центра масс,
![]() —
радиус-вектор i-й частицы системы,
—
радиус-вектор i-й частицы системы,
![]() —
полная энергия i-й частицы.
—
полная энергия i-й частицы.
Скорость движения центра масс.
М — полная масса механической системы
![]() —
импульсы частиц
—
импульсы частиц
k – некоторая система отсчета
18) Уравнение Мещерского. Реактивная сила.
Уравнение Мещерского – основное уравнение в механике тел переменной массы, полученное Иваном Мещерским в 1904г. Является частным случаем второго закона Ньютона.
Вывод формулы:
В момент времени ![]() масса тела
масса тела ![]() ,
а ее скорость
,
а ее скорость ![]() ;
тогда по истечении времени
;
тогда по истечении времени ![]() его масса уменьшится на
его масса уменьшится на ![]() и станет равной
и станет равной ![]() ,
а скорость увеличится до величины
,
а скорость увеличится до величины ![]() .
Изменение импульса системы за время
будет равно:
.
Изменение импульса системы за время
будет равно:
![]()

![]() - внешние силы;
- внешние силы;
![]() - скорость выбрасываемого тела;
- скорость выбрасываемого тела;
![]() – относительная скорость (скорость
выбрасываемого тела относительно
основного тела);
– относительная скорость (скорость
выбрасываемого тела относительно
основного тела);
Если противоположен , то тело ускоряется, а если совпадает – замедляется.
Уравнение Мещерского |
|
Реактивная сила |
|
19) Центральные силы взаимодействия между частицами направлены вдоль линии, соединяющей эти частицы. Эти силы зависят от расстояния между частицами, а следовательно силы являются консервативными.
*Полная механическая энергия системы взаимодействующих частиц сохраняется, если полная работа силы трения (неконсервативных сил) равняется нулю.
22) Поступательное, вращательное и плоскопараллельное движение твердого тела. Мгновенная ось вращения. Скорость точек при плоскопараллельном движении.
Плоскопараллельным (или плоским) называется такое движение твердого тела, при, котором все его точки перемещаются параллельно некоторой фиксированной плоскости П(рис. 28). Плоское движение совершают многие части механизмов и машин, например катящееся колесо на прямолинейном участке пути, шатун в кривошипно-ползунном механизме и др. Частным случаем плоскопараллельного движения является вращательное движение твердого тела вокруг неподвижной оси.
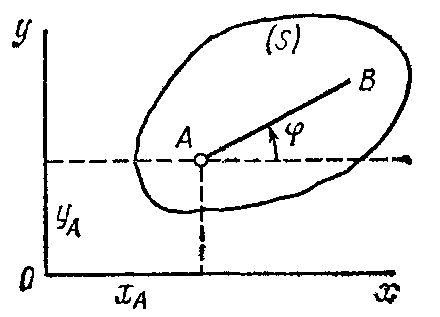
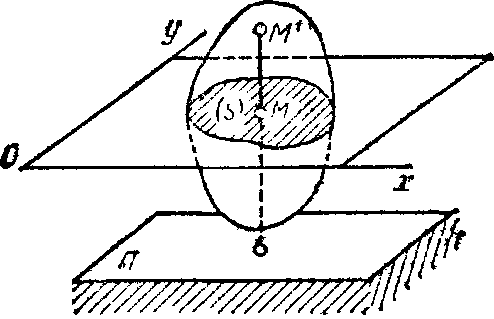
Рис.28 Рис.29
Рассмотрим сечение Sтела какой-нибудь плоскости Оxy, параллельной плоскости П(рис.29). При плоскопараллельном движении все точки тела, лежащие на прямой ММ’, перпендикулярной течению S, т. е. плоскости П, движутся тождественно.
Отсюда заключаем, что для изучения движения всего тела достаточно изучить, как движется в плоскости Оху сечение S этого тела или некоторая плоская фигураS. Поэтому в дальнейшем вместо плоского движения тела будем рассматривать движение плоской фигуры Sв ее плоскости, т.е. в плоскости Оху.
Положение фигуры Sв
плоскости Оху определяется положением
какого-нибудь проведенного на этой
фигуре отрезка АВ(рис. 28). В свою
очередь положение отрезка АВможно
определить, зная координаты
![]() и
и
![]() точки
Аи угол
точки
Аи угол
![]() ,
который отрезок АВ образует с осью
х. ТочкуА, выбранную для определения
положения фигуры S, будем в дальнейшем
называть полюсом.
,
который отрезок АВ образует с осью
х. ТочкуА, выбранную для определения
положения фигуры S, будем в дальнейшем
называть полюсом.
При движении фигуры величины и и будут изменяться. Чтобы знать закон движения, т. е. положение фигуры в плоскости Охув любой момент времени, надо знать зависимости
![]() .
.
Уравнения, определяющие закон происходящего движения, называются уравнениями движения плоской фигуры в ее плоскости. Они же являются уравнениями плоскопараллельного движения твердого тела.
Первые два из уравнений движения
определяют то движение, которое фигура
совершала бы при
=const;
это, очевидно, будет поступательное
движение, при котором все точки фигуры
движутся так же, как полюс А. Третье
уравнение определяет движение,
которое фигура совершала бы при
![]() и
и
![]() , т.е. когда полюсАнеподвижен; это
будет вращение фигуры вокруг полюса
А. Отсюда можно заключить, что в
общем случае движение плоской фигуры
в ее плоскости может рассматриваться
как слагающееся из поступательного
движения, при котором все точки фигуры
движутся так же, как полюс А, и из
вращательного движения вокруг этого
полюса.
, т.е. когда полюсАнеподвижен; это
будет вращение фигуры вокруг полюса
А. Отсюда можно заключить, что в
общем случае движение плоской фигуры
в ее плоскости может рассматриваться
как слагающееся из поступательного
движения, при котором все точки фигуры
движутся так же, как полюс А, и из
вращательного движения вокруг этого
полюса.
Основными кинематическими характеристиками
рассматриваемого движения являются
скорость и ускорение поступательного
движения, равные скорости и ускорению
полюса
![]() ,
,
![]() ,
а также угловая скорость
,
а также угловая скорость
![]() и угловое ускорение
и угловое ускорение
![]() вращательного движения вокруг полюса.
вращательного движения вокруг полюса.
Определение скоростей точек плоской фигуры
Было отмечено, что движение плоской
фигуры можно рассматривать как слагающееся
из поступательного движения, при котором
все точки фигуры движутся со скоростью
![]() полюсаА, и из вращательного движения
вокруг этого полюса. Покажем, что скорость
любой точки М фигуры складывается
геометрически из скоростей, которые
точка получает в каждом из этих движений.
полюсаА, и из вращательного движения
вокруг этого полюса. Покажем, что скорость
любой точки М фигуры складывается
геометрически из скоростей, которые
точка получает в каждом из этих движений.
В самом деле, положение любой точки
Мфигуры определяется по отношению
к осям Охурадиусом-вектором
![]() (рис.30), где
(рис.30), где
![]() -
радиус-вектор полюсаА,
-
радиус-вектор полюсаА,
![]() -
вектор, определяющий положение точки
М относительно осей
-
вектор, определяющий положение точки
М относительно осей
![]() ,
перемещающихся вместе с полюсом А
поступательно (движение фигуры по
отношению к этим осям представляет
собой вращение вокруг полюса А).
Тогда
,
перемещающихся вместе с полюсом А
поступательно (движение фигуры по
отношению к этим осям представляет
собой вращение вокруг полюса А).
Тогда
![]() .
.
В полученном равенстве величина
![]() есть скорость полюсаА; величина же
есть скорость полюсаА; величина же
![]() равна скорости
равна скорости
![]() ,
которую точка Мполучает при
,
которую точка Мполучает при
![]() ,
т.е. относительно осей
,
т.е. относительно осей
![]() ,
или, иначе говоря, при вращении фигуры
вокруг полюса А. Таким образом, из
предыдущего равенства действительно
следует, что
,
или, иначе говоря, при вращении фигуры
вокруг полюса А. Таким образом, из
предыдущего равенства действительно
следует, что
![]() .
.
Скорость , которую точка М получает при вращении фигуры вокруг полюсаА:
![]()
![]() ,
,
где - угловая скорость фигуры.
Таким образом, скорость любой точки
Мплоской фигуры геометрически
складывается из скорости какой-нибудь
другой точкиА, принятой за полюс, и
скорости, которую точка Мполучает
при вращении фигуры вокруг этого полюса.
Модуль и направление скорости
![]() находятся построением соответствующего
параллелограмма (рис.31).
находятся построением соответствующего
параллелограмма (рис.31).
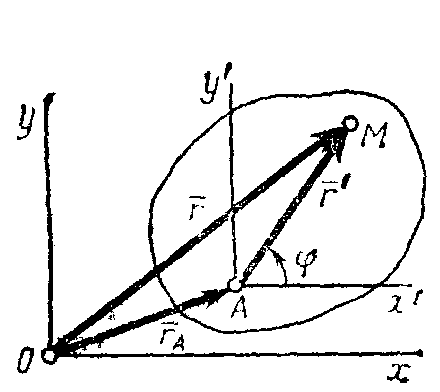
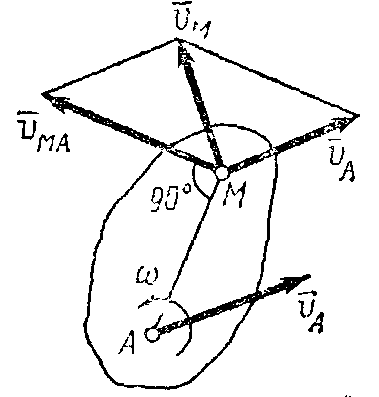
Рис.30 Рис.31
23. Фактически уравнением поступательного движения твердого тела является уравнение второго закона Ньютона: Используя уравнения:
![]() и
и  получаем
.
получаем
.
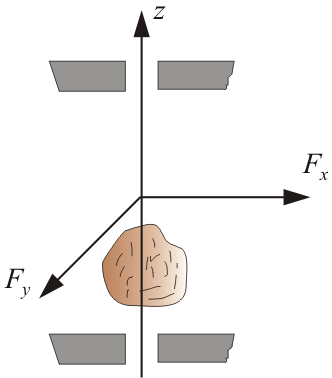
24.В этом случае составляющие
–![]() момента внешних сил, направленные вдоль
x и y,
компенсируются моментами сил реакции
закрепления.
момента внешних сил, направленные вдоль
x и y,
компенсируются моментами сил реакции
закрепления.
Вращение вокруг оси z происходит только под действием
6.4
 6.5
6.5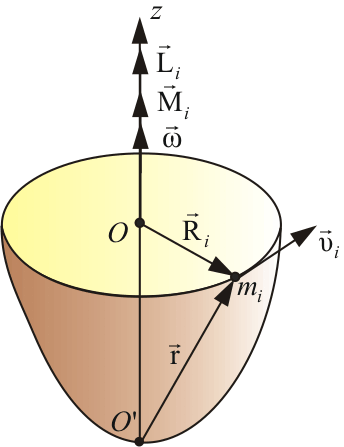
П![]() усть
некоторое тело вращается вокруг оси
z.Получим
уравнение динамики для некоторой точки
mi
этого тела находящегося на расстоянии
Ri
от оси вращения. При этом помним, что
и
усть
некоторое тело вращается вокруг оси
z.Получим
уравнение динамики для некоторой точки
mi
этого тела находящегося на расстоянии
Ri
от оси вращения. При этом помним, что
и
н![]() аправлены
всегда вдоль оси вращения z,
поэтому в дальнейшем опустим значок z.
аправлены
всегда вдоль оси вращения z,
поэтому в дальнейшем опустим значок z.
![]()
или
![]()
![]()
![]()
Так как у всех точек разная, введем, вектор угловой скорости причем
![]()
Тогда
Т![]() ак
как тело абсолютно твердое, то в процессе
вращения miиRi
останутся неизменными. Тогда:
ак
как тело абсолютно твердое, то в процессе
вращения miиRi
останутся неизменными. Тогда:
О![]() бозначим
Ii
– момент инерции
точки находящейся на
расстоянии R
от оси вращения:
бозначим
Ii
– момент инерции
точки находящейся на
расстоянии R
от оси вращения:
Т![]() ак
как тело состоит из огромного количества
точек и все они находятся на разных
расстояниях от оси вращения, то момент
инерции тела равен:
ак
как тело состоит из огромного количества
точек и все они находятся на разных
расстояниях от оси вращения, то момент
инерции тела равен:
где R – расстояние от оси z до dm. Как видно, момент инерции I – величина скалярная.
П![]()
![]() росуммировав
по всем i-ым
точкам,
росуммировав
по всем i-ым
точкам,
получим или - Это основное уравнение
динамики тела вращающегося вокруг неподвижной оси.
26) Момент импульса твердого тела.
![]()
![]()
![]()
![]() Момент
импульса есть векторная сумма моментов
импульсов всех материальных точек тела
относительно неподвижной оси.
Момент
импульса есть векторная сумма моментов
импульсов всех материальных точек тела
относительно неподвижной оси.
![]()
![]()
![]()
Если ось вращения твердого тела
закреплена, то момент силы перпендикулярный
этой оси (![]() )за
счет сил трения в подшипниках всегда
будет равняться нулю.
)за
счет сил трения в подшипниках всегда
будет равняться нулю.
![]()
Скорость изменения момента импульса твердого тела вдоль оси вращения, которая закреплена, равняется результирующему моменту внешних сил, направленному вдоль этой оси.

![]()
Момент импульса твердого тела |
|
![]() – момент инерции.
– момент инерции.
28)Момент сил трения качения – закон Кулона. Коэффициент трения качения.
Трение качения. Существование трения качения можно установить экспериментально, например, при исследовании качения тяжелого цилиндра радиуса на горизонтальной плоскости.
Если цилиндр и плоскость - твердые тела с шероховатыми поверхностями (рис. 55, a), то их касание будет происходить в точке, сила N уравновешивает силу тяжести P, а горизонтальная сила Q и сила трения F образуют пару сил (Q,F) под действием которой цилиндр должен начинать движение при любых величинах силы Q. В действительности же цилиндр начинает движение после того, как величина силы Q превысит предельное значение Ql.
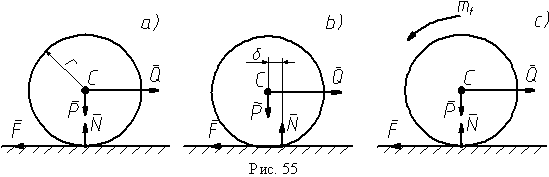
Этот факт можно объяснить, если предположить, что цилиндр и плоскость деформируются. Тогда их контакт будет происходить по малой площадке или лунке ( на рис. 55, b малая площадка изображена своим сечением). При увеличении силы Q центр давления будет перемещаться из середины сечения вправо. В результате образуется пара сил (P,N), которая препятствует началу движения цилиндра. В состоянии предельного равновесия на цилиндр действуют пара сил (Ql,F) с моментом Ql·r и уравновешивающая ее пара (P,N) с моментом N·δ, где δ - значение максимального смещения. Из равенства моментов пар сил находим (6)
Пока Q <Ql, цилиндр находится в покое, при Q >Ql начинается качение.
Обычно рис. 55, b упрощают, не изображая на нем смещения точки приложения нормальной реакции, добавляя к силам на рис. 55, a пару сил, препятствующую качению цилиндра, как показано на рис. 55, c.
Момент этой пары сил называется моментом трения качения, он равен моменту пары сил (P,N): (7)
Входящая в формулы (6) и (7) величина максимального смещения точки приложения нормальной реакции δ называется коэффициентом трения качения. Он имеет размерность длины и определяется экспериментально. Приведем приближенные значения этого коэффициента (в метрах) для некоторых материалов: дерево по дереву δ = 0,0005-0,0008; мягкая сталь по стали (колесо по рельсу) - 0.00005; закаленная сталь по стали (шарикоподшипник ) - 0.00001.
Отношение δ/r в формуле (6) для большинства материалов значительно меньше коэффициента трения покоя f0 . Поэтому в технике, когда это возможно, стремятся скольжение заменить качением (колеса, катки, шарикоподшипники и т.п.).
![]() (6)
(6)
![]() (7)
(7)
Закон Амонтона — Кулона
Основная статья: Закон Кулона (механика)
Не путать с законом Кулона!
Основной характеристикой трения является коэффициент трения μ, который определяется материалами, из которых изготовлены поверхности взаимодействующих тел.
В простейших случаях сила трения F и нормальная нагрузка (или сила нормальной реакции) Nnormal связаны неравенством обращающимся в равенство только при наличии относительного движения. Это соотношение называется законом Амонтона — Кулона.