

1.Система отсчета-начальная точка отсчета, система координат и часы.
Радиус вектор- направленны отрезок из начала координат в ту точку где находится частица.
![]()
![]()
Траектория- линия вдоль которой движется тело.
Путь- длина дуги траектории, пройденной телом за время t.
2. Вектор смещения. Вектор линейной скорости.
Вектор смещения- вектор, проведенный из начального положения точки в конечное положение
Этот вектор равен изменению радиус вектора
Вектор линейной скорости представляет собой векторное произведение вектора угловой скорости и радиус – вектора точки.
Вектор линейной скорости направлен по касательной к точке.
3)Ускорение -производная скорости по времени — векторная величина, показывающая, насколько изменяется вектор скорости точки (тела) при её движении за единицу времени (т.е. ускорение учитывает не только изменение величины скорости, но и её направления).
Вектор ускорения материальной точки в любой момент времени находится путём дифференцирования вектора скорости материальной точки по времени:
![]() .
.
Ускорение точки при прямолинейном движении
Если
вектор
![]() не
меняется со временем, движение называют
равноускоренным.
При равноускоренном движении справедливы
формулы:
не
меняется со временем, движение называют
равноускоренным.
При равноускоренном движении справедливы
формулы:
![]()
![]() .
.
Частным случаем равноускоренного движения является случай, когда ускорение равно нулю в течение всего времени движения. В этом случае скорость постоянна, а движение происходит по прямолинейной траектории (если скорость тоже равна нулю, то тело покоится), поэтому такое движение называют прямолинейным и равномерным.
Равноускоренное движение точки всегда является плоским, а твёрдого тела — плоскопараллельным (поступательным)
Вектор ускорения
![]()
при движении точки по окружности можно разложить на два слагаемых (компоненты):
![]()
Тангенциальное
ускорение
—
![]() направлено
по касательной к траектории (обозначается
иногда
направлено
по касательной к траектории (обозначается
иногда
![]() в зависимости от того, какой буквой в
данной книге принято обозначать
ускорение). Является составляющей
вектора ускорения a.
Характеризует изменение скорости по
модулю.
в зависимости от того, какой буквой в
данной книге принято обозначать
ускорение). Является составляющей
вектора ускорения a.
Характеризует изменение скорости по
модулю.
![]()
Центростремительное
или Нормальное
ускорение
![]() —
возникает (не равно нулю) всегда при
движении точки по окружности (конечного
радиуса) (также обозначается иногда
итд).
Является составляющей вектора ускорения
a,
перпендикулярной вектору мгновенной
скорости. Вектор нормального ускорения
всегда направлен к центру окружности,
а модуль равен:
—
возникает (не равно нулю) всегда при
движении точки по окружности (конечного
радиуса) (также обозначается иногда
итд).
Является составляющей вектора ускорения
a,
перпендикулярной вектору мгновенной
скорости. Вектор нормального ускорения
всегда направлен к центру окружности,
а модуль равен:
![]()
Угловое ускорение — показывает, на сколько изменилась угловая скорость за единицу времени, и, по аналогии с линейным ускорением, равно:
![]()
Направление вектора здесь показывает, увеличивается или уменьшается модуль скорости. Если векторы углового ускорения и скорости сонаправлены, значение скорости растёт, и наоборот.
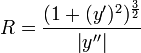
4. Кривизна траектории показывает, какова форма движения в пространстве. Чтобы определить кривизну траектории, измеряют радиус кривизны. Если траектория является дугой окружности, радиус кривизны постоянный. С увеличением кривизны ее радиус уменьшается, и, наоборот, с уменьшением кривизны, радиус увеличивается.
Пусть траетория имеет изгибы, тогда там где кусочек изгиба можно построить окружность подобранного радиуса, чтобы она подходила к данному месту изгиба. Радиус такой окружности и есть радиус кривизны. Радиус кривизны прямой - бесконесность; круга - и есть радиус данного круга, причем у круга постоянный радиус кривизны. Эллипс.т.к. эллипс - комбинация двух окружностей разного радиуса, то у эллипса 2 радиуса кривизны, которые совпадают с радиусами окружностей (переход между одной и другой окружностями не учитываем).
Формула для нахождения радиуса кривизны:
5) Вектор элементарного угла поворота, угловой скорости, углового ускорения. Центростремительное ускорение.
Угловая скорость и угловое
ускорение.
Рассмотрим твердое
тело, которое вращается вокруг неподвижной
оси. Тогда отдельные точки этого тела
будут описывать окружности разных
радиусов, центры которых лежат на оси
вращения. Пусть некоторая точка движется
по окружности радиуса R (рис. 1). Ее
положение через промежуток времени Δt
зададим углом Δφ. Элементарные (бесконечно
малые) повороты можно рассматривать
как векторы (они обозначаются Δφ
или dφ). Модуль вектора dφ равен
углу поворота, а его направление совпадает
с направлением поступательного движения
острия винта, головка которого вращается
в направлении движения точки по
окружности, т. е. подчиняется правилу
правого винта (рис. 1). Векторы,
направления которых связываются с
направлением вращения, называются
псевдовекторами или аксиальными
векторами. Эти векторы не имеют
определенных точек приложения: они
могут откладываться из любой точки оси
вращения.
Угловой скоростью
называется векторная величина, равная
первой производной угла поворота тела
по времени:
![]() Вектор
ω направлен вдоль оси вращения по
правилу правого винта, т. е. так же, как
и вектор dφ (рис. 2). Размерность
угловой скорости dim ω = Т-1, а ее
единица — радиан в секунду (рад/с).
Линейная скорость точки (см. рис.
1)
Вектор
ω направлен вдоль оси вращения по
правилу правого винта, т. е. так же, как
и вектор dφ (рис. 2). Размерность
угловой скорости dim ω = Т-1, а ее
единица — радиан в секунду (рад/с).
Линейная скорость точки (см. рис.
1)
![]()
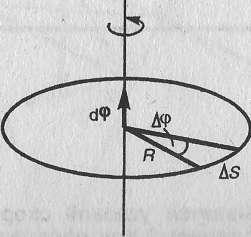
Рис.1
т.е
v=ωR
В векторном виде формулу для
линейной скорости можно написать как
векторное произведение:
![]() При
этом модуль векторного произведения,
по определению, равен ωRsin(ω, R),
а направление совпадает с направлением
поступательного движения правого винта
его вращения отω к R.
При
этом модуль векторного произведения,
по определению, равен ωRsin(ω, R),
а направление совпадает с направлением
поступательного движения правого винта
его вращения отω к R.
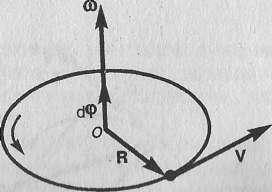
Рис.2
Если ω=const, то вращение равномерное и его можно характеризовать периодом вращения Т - временем, за которое точка совершает один полный оборот, т. е. поворачивается на угол 2π. Так как промежутку времени Δt=Т соответствует Δφ=2π, то ω=2π/T, откуда
Т = 2π/ω.
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:
n= 1/T = ω/(2π),
откуда
ω = 2πn.
Угловым ускорением называется
векторная величина, равная первой
производной yгловой скорости по времени:
![]()

Рис.3
При вращении тела вокруг неподвижной оси вектор углового ускорения ε направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор εсонаправлен вектору ω (рис. 3), при замедленном - противонаправлен ему (рис. 4).

Рис.4
Тангенциальная составляющая
ускорения aτ=dv/dt , v = ωR и
![]() Нормальная
составляющая ускорения
Нормальная
составляющая ускорения
![]() Значит,
связь между линейными (длина пути s,
пройденного точкой по дуге окружности
радиуса R, линейная скорость v, тангенциальное
ускорение аτ, нормальное ускорение
аn) и угловыми величинами (угол
поворота φ, угловая скорость ω, угловое
ускорение ε) выражается следующими
формулами:
Значит,
связь между линейными (длина пути s,
пройденного точкой по дуге окружности
радиуса R, линейная скорость v, тангенциальное
ускорение аτ, нормальное ускорение
аn) и угловыми величинами (угол
поворота φ, угловая скорость ω, угловое
ускорение ε) выражается следующими
формулами:
s = Rφ, v = Rω, аτ = R?, an = ω2R.
В случае равнопеременного движения точки по окружности (ω=const)
ω = ω0 ± ?t, φ = ω0t ± ?t2/2,
где ω0 — начальная угловая скорость.
6.
Угловая скорость – векторная
величина, определяемая первой производной
угла поворота тела по времени. Выражается
формулой ![]() =
= ![]() .
.
Угловое ускорение – векторная величина,
определяемая первой производной угловой
скорости по времени. Выражается формулой
 .
.
Связь между угловыми величинами ( угловой скоростью и угловым ускорением) с линейными (линейной скоростью, тангенциального и линейного ускорения) выражается следующими формулами :
![]() - где:
- где: ![]() – линейная скорость точки.
– линейная скорость точки.
![]() - где:
- где: ![]() - тангенциальное ускорение,
- тангенциальное ускорение, ![]() -
угловое ускорение.
-
угловое ускорение.
![]() - где:
- где: ![]() – нормальное ускорение.
– нормальное ускорение.
7. Равноускоренное прямолинейное движение.
В общем случае равноускоренным
движением называют
такое движение, при котором вектор
ускорения ![]() остается
неизменным по модулю и направлению.
Примером такого движения является
движение камня, брошенного под некоторым
углом к горизонту (без учета сопротивления
воздуха). В любой точке траектории
ускорение камня равно ускорению
свободного падения
остается
неизменным по модулю и направлению.
Примером такого движения является
движение камня, брошенного под некоторым
углом к горизонту (без учета сопротивления
воздуха). В любой точке траектории
ускорение камня равно ускорению
свободного падения![]() .
.
Определяется по формулам:
![]()
![]() .
.


![]()
8 . Движение тела по окружности
является частным случаем криволинейного
движения. Наряду с вектором перемещения
![]() удобно
рассматривать угловое перемещение
Δφ (или угол поворота), измеряемое
в радианах
удобно
рассматривать угловое перемещение
Δφ (или угол поворота), измеряемое
в радианах
Угловая скорость измеряется в рад/с.
Связь между модулем линейной скорости υ и угловой скоростью ω:
υ = ωR. |
При
равномерном движении тела по окружности
величины υ и ω остаются неизменными. В
этом случае при движении изменяется
только направление вектора
![]()
Равномерное движение тела по окружности является движением с ускорением. Ускорение
|
направлено по радиусу к центру окружности. Его называют нормальным, или центростремительным ускорением. Модуль центростремительного ускорения связан с линейной υ и угловой ω скоростями .
9. Основные Законы и принцип механики Ньютона
1 закон Ньютона
Если ускорение тела равно 0,то существуют такие системы координат в которых это тело будет иметь простейшее уравнение движения, то есть двигаться прямолинейно и равномерно, либо покоится.
2 Закон Ньютона(самый основной)
Зависимость вектора ускорения от вектора силы согласно Ньютону, вектор ускорения прямопропорционален вектору силы и обратно пропорционален массе тела.
3 Закон Ньютона
Описывает взаимодействие между телами и утверждает что сила которая действует на 1-ое тело со стороны 2-ого по величине равен вектору силы действующей со стороны 1-ого тела.
Основной принцип: Масса тела не зависит от скорости тела, не зависит от его положения в пространстве, а также от взаимодействия с другими телами. (масса яв-ся характеристикой).