

2. Расчет параметров траектории
Перед определением
запасов топлива разберемся с оптимальной
последовательностью обхода поражаемых
целей. Примем, что запас рабочего тела
будет минимальным в случае минимума
суммы боковых отклонений от плоскости
стрельбы и отклонений по дальности
целей с учетом производных дальности
и боковых отклонений по скорости:
 .
Если пренебречь вкладом слагаемого
.
Если пренебречь вкладом слагаемого
 и
заметить, что при больших дальностях
стрельбы (
и
заметить, что при больших дальностях
стрельбы (![]() )
)
![]() ,
то предыдущее выражение значительно
упрощается:
,
то предыдущее выражение значительно
упрощается:
 .
Для ракет подводного старта существует
множество точек стрельбы, расположенных
на окружности радиуса
.
Для ракет подводного старта существует
множество точек стрельбы, расположенных
на окружности радиуса
![]() .
Центр этой окружности имеет координаты
39,96028 с.ш. и 75,735169 з.д. (рядом с городом
Филадельфия).
.
Центр этой окружности имеет координаты
39,96028 с.ш. и 75,735169 з.д. (рядом с городом
Филадельфия).
На рисунке 2
изображена схема базирования подводной
лодки. Точка
![]() – координата подводной лодки относительно
системы координат
– координата подводной лодки относительно
системы координат
![]() .
Точка
.
Точка
![]() – координата первой поражаемой цели
относительно системы координат
,
а также начало отсчета новой системы
координат
– координата первой поражаемой цели
относительно системы координат
,
а также начало отсчета новой системы
координат
![]() ,
в которой ось
,
в которой ось
![]() совпадает с плоскостью стрельбы. Система
координат
была
выбрана таким образом, чтобы ось
совпадает с плоскостью стрельбы. Система
координат
была
выбрана таким образом, чтобы ось
![]() была
направлена на северный полюс (другими
словами, чтобы ось совпадала с меридианом,
проходящим через начало координат) –
это позволит вычислить путевые углы1,
которые впоследствии пригодятся для
нахождения таких углов
была
направлена на северный полюс (другими
словами, чтобы ось совпадала с меридианом,
проходящим через начало координат) –
это позволит вычислить путевые углы1,
которые впоследствии пригодятся для
нахождения таких углов
![]() ,
при которых подводная лодка будет
находиться на суше и которые необходимо
будет исключить из рассмотрения.
,
при которых подводная лодка будет
находиться на суше и которые необходимо
будет исключить из рассмотрения.
Было решено написать программу, которая будет варьировать угол , и для каждого его конкретного значения определять оптимальную последовательность обхода целей. Для каждого определяются сразу две оптимальные последовательности обхода: первая на основе критерия , а вторая – . Боковые отклонения и отклонения по дальности вычисляются в системе координат , центр которой совпадает с координатой первой цели поражения. Координаты остальных целей пересчитываются относительно новой системы координат по зависимостям:
Код программы
приведен в Приложении 1. Таблица
результатов расчета программы приведена
в Приложении 2, где ячейки таблицы,
окрашенные в серый цвет, соответствуют
таким углам
,
при которых точка А
с координатами
![]() попадает на участок суши. Эти углы
были найдены через путевые углы, которые
в свою очередь были определены по
программе «Путевые
углы и расстояние между двумя точками
на ортодроме (дуге большого круга)»,
расположенной по адресу
http://www.planetcalc.ru/722/
. Найденные
углы
были нанесены на карту Земли (рисунок
3).
попадает на участок суши. Эти углы
были найдены через путевые углы, которые
в свою очередь были определены по
программе «Путевые
углы и расстояние между двумя точками
на ортодроме (дуге большого круга)»,
расположенной по адресу
http://www.planetcalc.ru/722/
. Найденные
углы
были нанесены на карту Земли (рисунок
3).
Рисунок 2 – Схема базирования подводной лодки

Рисунок 3 – Углы перехода Суша-Океан (Океан-Суша) в СК x0Oy0
Черная линия – окружность радиуса
На основе полученных
результатов построим график распределения
минимальных суммарных отклонений
в зависимости от угла α
(рисунок 4).
Минимальное суммарное отклонение
соответствует углам
![]() (лежит
на суше) и
(лежит
на суше) и
![]() и равно 244,67 км. Максимальное суммарное
отклонение соответствует углам
и равно 244,67 км. Максимальное суммарное
отклонение соответствует углам
![]() и
и
![]() и равно 369,83 км. Именно последний вариант
необходимо взять за расчетный, т.к. это
будет гарантировать поражение целей
при любом допустимом положении подводной
лодки на окружности радиуса
с центром в точке с координатами 39,96028
с.ш. и 75,735169 з.д. (рядом с городом Филадельфия)
(рисунок 4).
и равно 369,83 км. Именно последний вариант
необходимо взять за расчетный, т.к. это
будет гарантировать поражение целей
при любом допустимом положении подводной
лодки на окружности радиуса
с центром в точке с координатами 39,96028
с.ш. и 75,735169 з.д. (рядом с городом Филадельфия)
(рисунок 4).
Анализируя график (рисунок 4) и таблицу результатов (приложение 2) можно сделать два вывода:
при смене направления стрельбы на противоположное минимальное суммарное отклонение не меняется;
последовательность обхода целей можно поменять на противоположную (например 12345678 → 87654321), при этом минимальное суммарное отклонение останется прежним.
За расчетный
выберем вариант
,
которому соответствует последовательность
обхода целей 28476351 (целесообразно
заменить на противоположную 15367482).
 .
Все данные сведены в таблицу 3.
.
Все данные сведены в таблицу 3.
Последовательность обхода целей изображена на рисунке 5.
Для этого варианта проведем расчет запаса топлива, основываясь на приближенных аналитических зависимостях.
Таблица 3 – Расчетная
таблица суммарных отклонений
![]() и
и
![]()
Комбинация обхода целей |
|
|
||||||
1-2 |
2-3 |
3-4 |
4-5 |
5-6 |
6-7 |
7-8 |
||
15367482 |
|
|
|
|
|
|
|
|
 ,
км
,
км
Рисунок 4 – Распределение суммарных отклонений
в зависимости от угла α
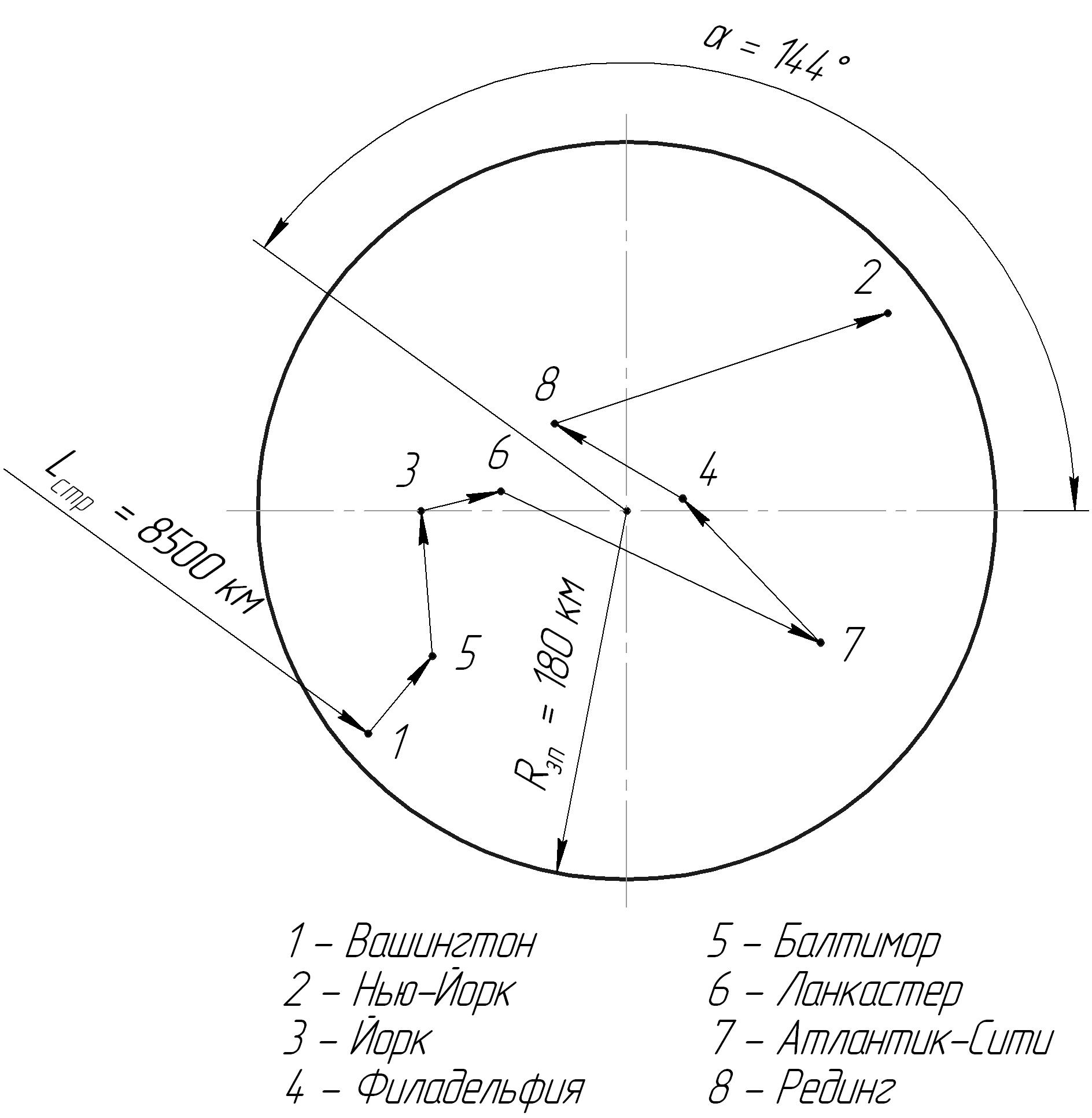
Рисунок 5 – Последовательность обхода целей при α = 144°