

А.Р. Герке, А.В. Лира, М.Ю. Перухин
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ И ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
Методическое пособие
Федеральное агентство по образованию Государственное образовательное учреждение
высшего профессионального образования
«Казанский государственный технологический университет»
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ И ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
Методическое пособие
Лабораторная работа № 8
Автоматические регуляторы и типовые законы регулирования
Цель работы:
1) Ознакомиться с основными элементами автоматической системы регулирования.
2) Ознакомиться с типовыми законами регуляторов.
3) Изучить микропроцессорные измерительно-регулирующие устройства (на примере микропроцессорного измерителя-регулятора типа ТРМ 10).
Теоретическая часть
Автоматический регулятор – это устройство, которое, сравнивая текущее значение регулируемой величины с заданным, воздействует на технологический процесс таким образом, что текущее значение регулируемой величины автоматически поддерживается равным заданному.
Система автоматического регулирования (САР) – совокупность объекта регулирования и авторегулятора, взаимодействующих между собой.
На рис.1 представлена структурная схема замкнутой САР.
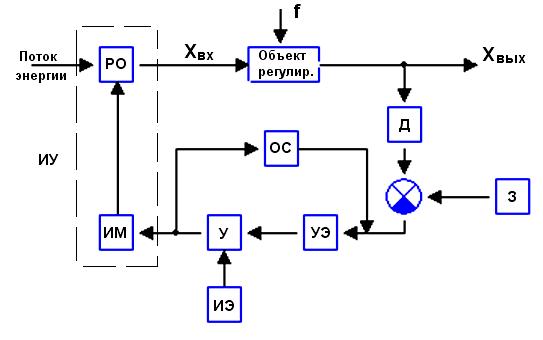
Рис. 1. Функциональная схема САР. Обозначение элементов схемы: Д- датчик; ЭС- элемент сравнения; З- задатчик; УЭ- управляющий элемент; У- усилитель; ИУ- исполнительное устройство; ОС- обратная связь; ИЭ- источник энергии; f- возмущение (внешний фактор).
Задачей автоматического регулирования является поддержание заданных параметров, определяющих условия протекания технологического процесса без участия человека. Факторы, влияющие на состояние процесса в объекте, называются воздействиями.
На рис.2 приведена упрощенная структурная схема САР.
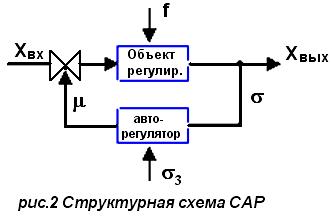
Рис. 2. Структурная схема САР.
На объект регулирования действует возмущающее воздействие f, в результате чего возникает разность между текущим и заданным з значениями регулируемой величины - сигнал рассогласования:
=( - з).
По величине сигнала рассогласования регулятор вырабатывает регулирующее воздействие . При необходимости изменить параметр регулирования Хвых изменяют величину задающего воздействия з.
Одной из основных характеристик регулятора является закон регулирования.
Закон регулирования – функциональная связь между входным и выходным значениями регулятора. Под входной величиной регулятора понимается сигнал рассогласования , а под выходной величиной - его регулирующее воздействие , которое вызывает перемещение регулирующего органа. При этом целенаправленно изменяются материальные, энергетические потоки вводимые в объект регулирования или выводимые из него, вследствие чего регулируемая величина возвращается к заданному значению. Следовательно, закон регулирования выражается зависимостью: = ƒ(). По виду этой зависимости в теории автоматического регулирования различают пять видов законов регулирования и соответственно пять видов регуляторов с непрерывным законом регулирования: П – пропорциональный, И – интегральный, ПИ – пропорционально-интегральный, ПД – пропорционально-дифференциальный, ПИД – пропорционально-интегрально-дифференциальный.
Пропорциональный закон регулирования (П-регулятор)
П-регулятор – регулятор, у которого выходная величина изменяется пропорционально входной.
Ниже приведена структурная схема САР с использованием П-регулятора и переходная характеристика (рис. 3-4).

Рис.3. Структурная схема
![]() (1)
(1)
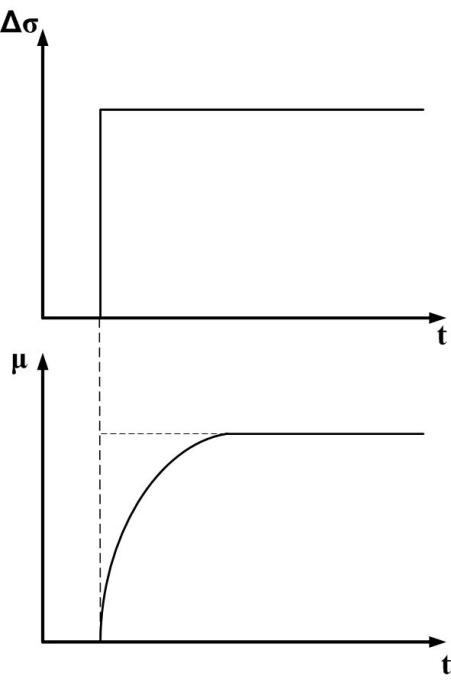
Рис. 4. Переходная характеристика
идеального П-регулятора
Достоинства: хорошо работает в неустановившихся режимах, простота конструкции и низкая стоимость
Недостатки: наличие остаточного отклонения регулируемого параметра, т.е. текущее значение регулируемой величины немного не достигает заданного значения.
Интегральный закон регулирования (И-регулятор)
И-регулятор – регулятор, у которого изменение регулирующего воздействия пропорционально интегралу входной величины .
Ниже приведены структурная схема САР (рис. 5) с использованием И-регулятора и переходная характеристика для идеального (рис. 6) и реального (рис.7) интегрального регулятора.
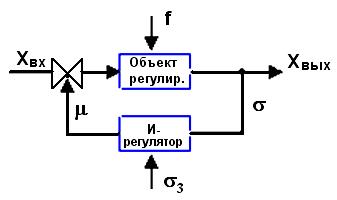
Рис. 5. Структурная схема.
![]() (2)
(2)
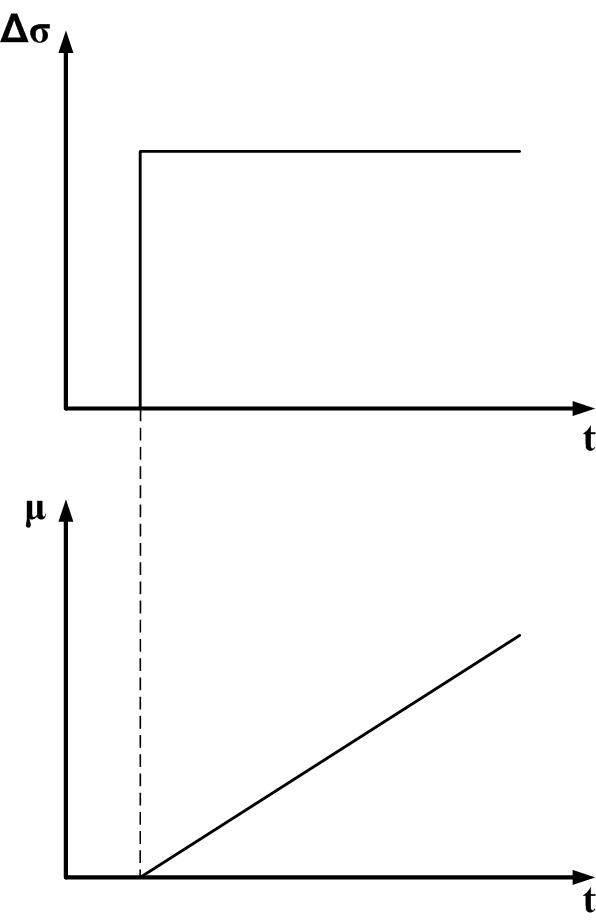
Рис. 6. Переходная характеристика
идеального И-регулятора.
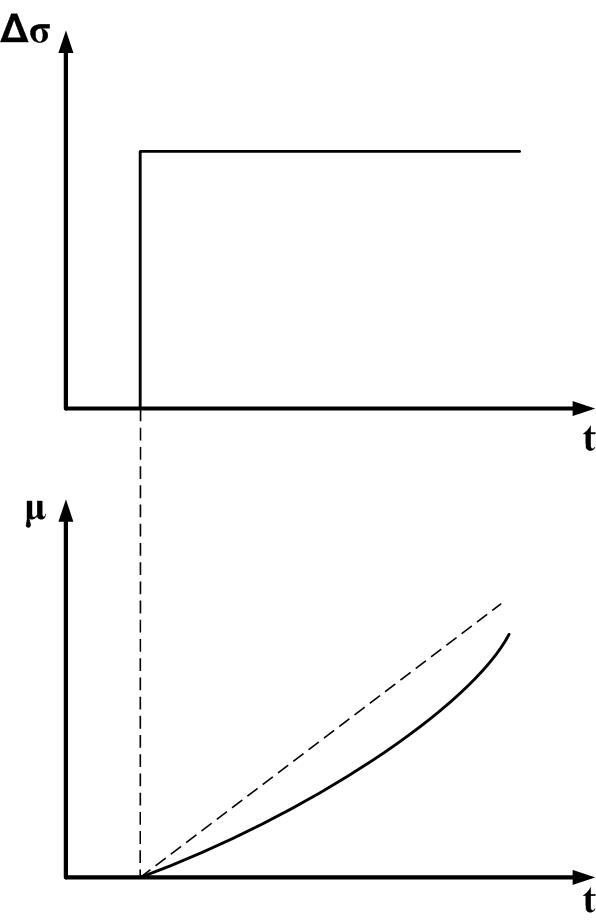
Рис. 7. Переходная характеристика
реального И-регулятора.
Достоинства: высокая точность, отсутствие остаточного отклонения регулируемого параметра.
Недостатки: плохо работает в неустановившихся режимах, низкая скорость регулирования
Пропорционально-интегральный закон регулирования (ПИ-регулятор)
ПИ-регулятор- регулятор представляет совокупность П- и И-регуляторов.
Ниже приведены структурная схема САР (рис. 8) с использованием ПИ-регулятора и переходная характеристика для идеального (рис. 9) и реального (рис.10) пропорционально-интегрального регулятора.
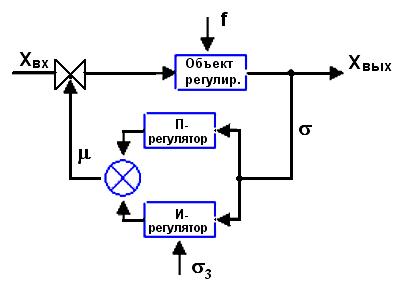
Рис. 8. Структурная схема.
![]() (3)
(3)
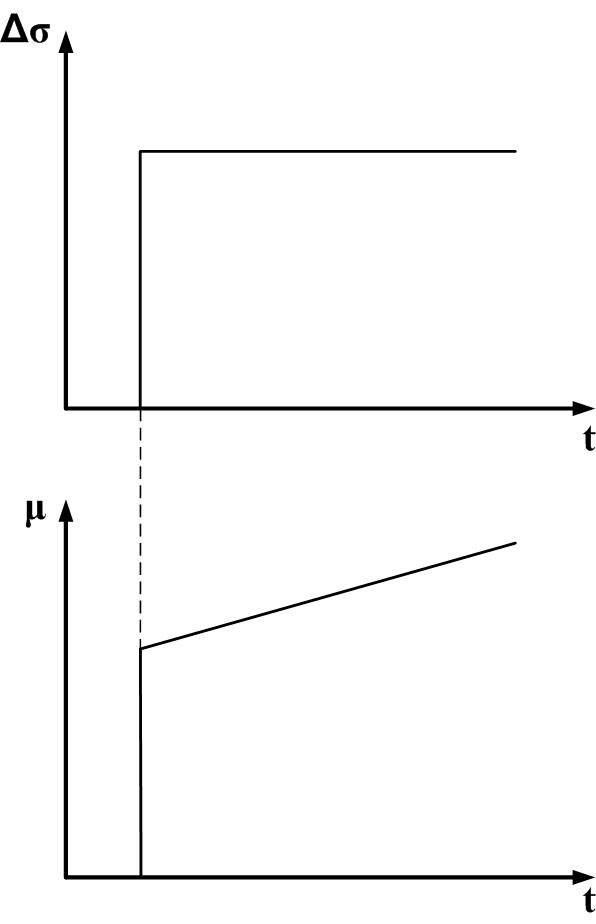
Рис. 9. Переходная характеристика
идеального ПИ-регулятора
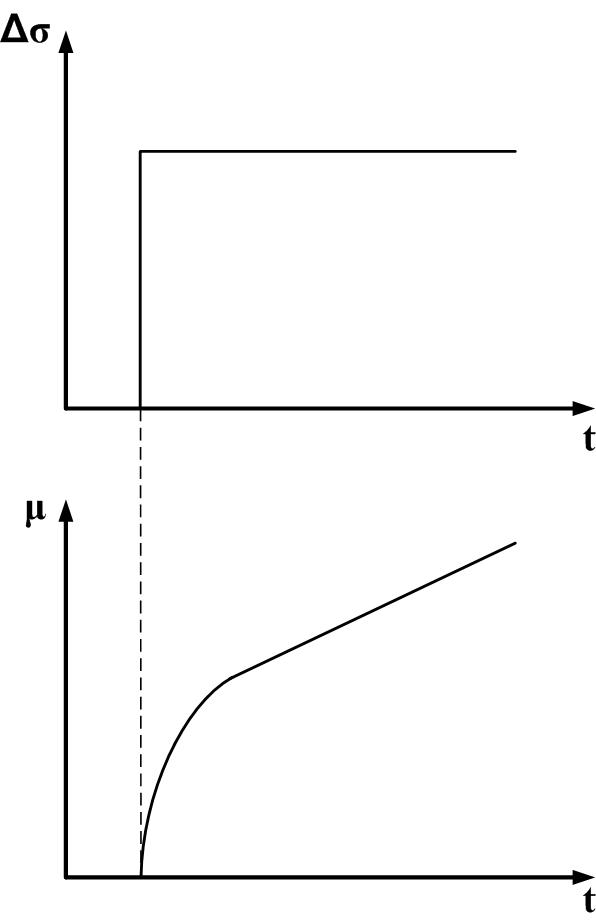
Рис. 10. Переходная характеристика
реального ПИ-регулятора.
Достоинства: хорошо работает в неустановившимся режиме, имеет высокую точность без остаточного отклонения, качество выше чем у П и И регуляторов.
Недостатки: процесс регулирования осуществляется дольше, чем у П - регулятора.
Пропорционально-дифференциальный закон регулирования (ПД-регулятор)
ПД – регулятор – регулятор, у которого изменение регулирующего воздействия пропорционально отклонению регулируемой величины и скорости этого отклонения.
Регулирующий орган перемещается с некоторым опережением (предварением) пропорциональным скорости изменения регулируемой величины, поэтому действие предварения представляет временное увеличение коэффициента усиления регулятора.
Ниже приведены структурная схема САР (рис. 11) с использованием ПИ-регулятора и переходная характеристика для идеального (рис. 12) и реального (рис.13) пропорционально-дифференциального регулятора.
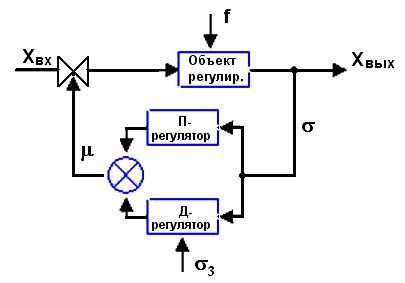
Рис. 11. Структурная схема.
![]() (4)
(4)
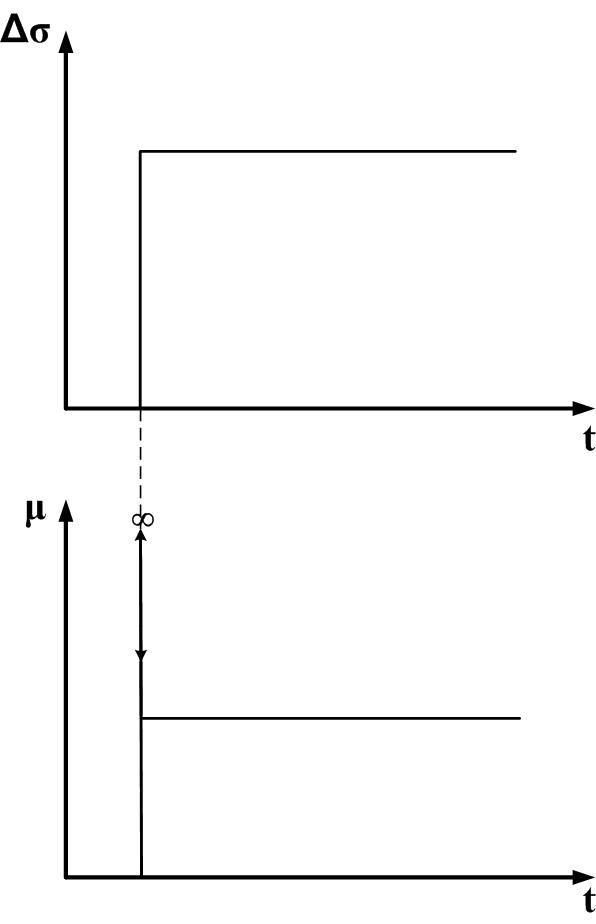
Рис. 12. Переходная характеристика
идеального ПД-регулятора
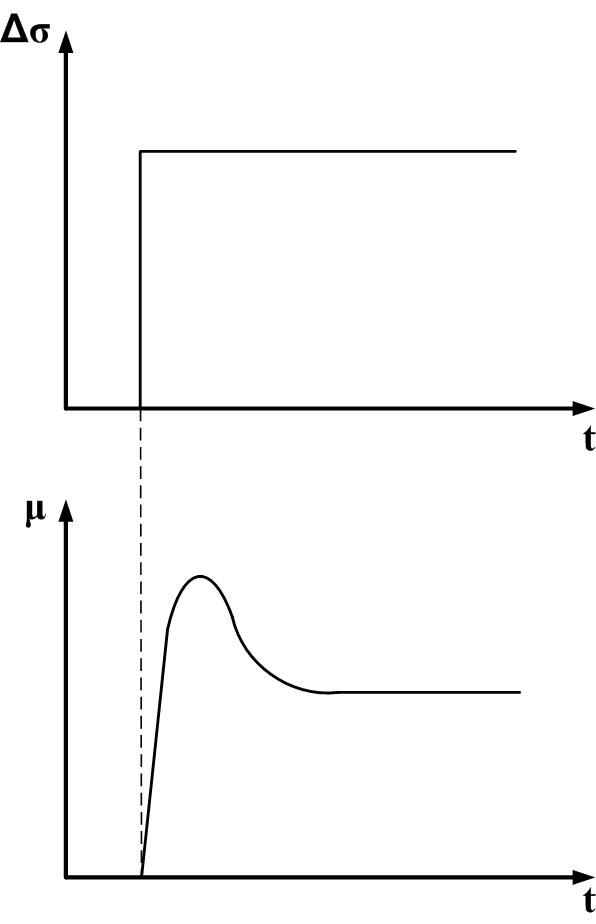
Рис. 13. Переходная характеристика
реального ПД-регулятора.
Достоинства: сокращенное время регулирования.
Недостатки: вероятность появления ошибки регулирования, если временные свойства объекта не постоянны.
Пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор)
ПИД – регулятор – регулятор, у которого регулирующее воздействие пропорционально отклонению регулируемого параметра, интегралу и скорости этого отклонения.
Ниже приведены структурная схема САР (рис. 14) с использованием ПИД-регулятора и переходная характеристика для идеального (рис. 15) и реального (рис.16) пропорционально-интегрально-дифференциального регулятора.

Рис. 14. Структурная схема.
![]() (5)
(5)
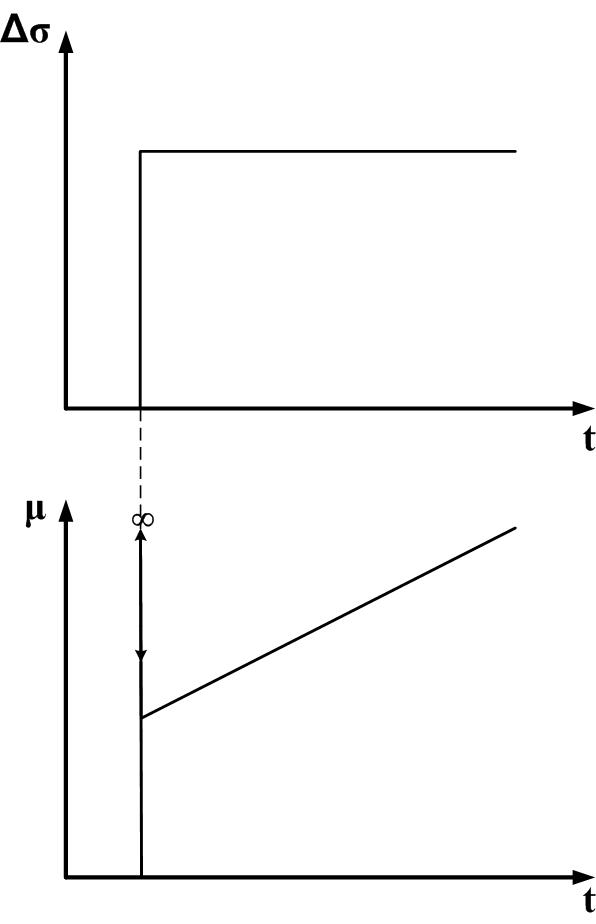
Рис. 15. Переходная характеристика
идеального ПИД-регулятора
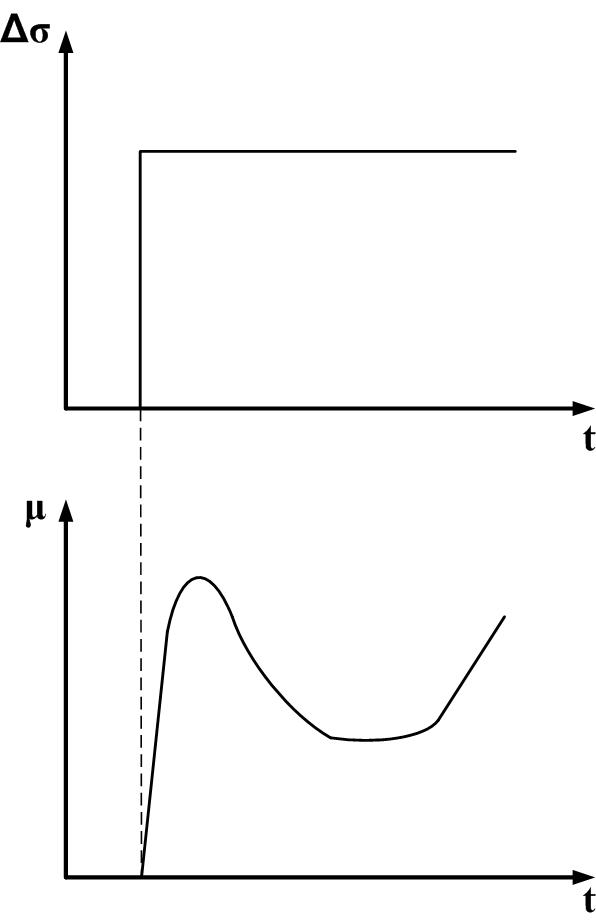
Рис. 16. Переходная характеристика
реального ПИД-регулятора.
Достоинства: сочетает достоинства П-, И-, ПД-, ПИ- регуляторов.
Недостатки: высокая стоимость.