

10.4.2. Генератор з системою фапч к564гг1
Принцип фазової автоматичної підгонки частоти (ФАПЧ) керованих генераторів синусоїдальних або імпульсних сигналів спочатку знайшов широке використання в різних областях радіотехніки та радіолокації, а потім – у пристроях промислової автоматики, енергетичної електроніки, в вимірювальних приладах та інших напрямках електронної техніки.
Основою
будь-якої системи ФАПЧ є керований
напругою генератор за типом перетворювача
U → f
К1108ПП1 і фазовий
детектор
– пристрій, що перетворює різницю фаз
між сигналами двох рівних (кратних)
частот у напругу постійного струму,
середнє значення якої пропорційне
різниці фаз, тобто
![]() .
В якості фазових детекторів серед
розглянутих вище пристроїв можуть
використовуватись RS-
та JK-тригери,
ЛЕ ВИКЛ.
АБО.
.
В якості фазових детекторів серед
розглянутих вище пристроїв можуть
використовуватись RS-
та JK-тригери,
ЛЕ ВИКЛ.
АБО.
Функціональна схема, що пояснює роботу системи ФАПЧ, приведена на рис. 10.48.
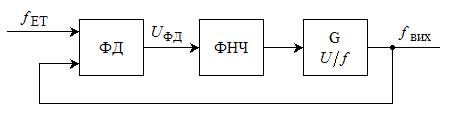
Рис. 10.48
Частоти
fЕТ
і fвих
однакові й відрізняються лише фазами.
Якщо сигнали обох частот представляють
собою меандр, а в якості фазового
детектора використовується, наприклад,
ЛЕ ВИКЛ.
АБО,
то, враховуючи лінійну залежність між
![]() і
і
![]() ,
при
,
при
![]() величина
величина
![]() .
Частота генератора, що відповідає цій
напрузі, називається центральною
частотою
.
Частота генератора, що відповідає цій
напрузі, називається центральною
частотою
![]() .
.
Особливість
системи ФАПЧ полягає в тому, що вона
може працювати лише в тому випадку, якщо
з самого початку
![]() .
При досить незначній різниці між
частотами сигнал
матиме вигляд широтно-модульованого
сигналу. Фільтр низьких частот ФНЧ
виділятиме модуляційну складову, що
повинна забезпечувати керування
генератором. Якщо таке керування має
місце, то вважається, що система ФАПЧ
“підхопила” зміни вхідного сигналу.
Такий процес називається “захопленням”
вхідного сигналу.
Різниця між частотами, при яких має
місце явище “захоплення”, досить
незначна, а відповідний частотний
діапазон в околиці
.
При досить незначній різниці між
частотами сигнал
матиме вигляд широтно-модульованого
сигналу. Фільтр низьких частот ФНЧ
виділятиме модуляційну складову, що
повинна забезпечувати керування
генератором. Якщо таке керування має
місце, то вважається, що система ФАПЧ
“підхопила” зміни вхідного сигналу.
Такий процес називається “захопленням”
вхідного сигналу.
Різниця між частотами, при яких має
місце явище “захоплення”, досить
незначна, а відповідний частотний
діапазон в околиці
![]() називається діапазоном захоплення
частоти
називається діапазоном захоплення
частоти
![]() .
Якщо система ФАПЧ працює, то зміна
частоти
.
Якщо система ФАПЧ працює, то зміна
частоти
![]() в деяких межах буде нею відслідковуватись.
Діапазон частот
,
в якому забезпечуватиметься робота
ФАПЧ, називається діапазоном
автопідгонки частоти
в деяких межах буде нею відслідковуватись.
Діапазон частот
,
в якому забезпечуватиметься робота
ФАПЧ, називається діапазоном
автопідгонки частоти
![]() .
Реально
.
Реально
![]() .
.
Система ФАПЧ може забезпечувати підгонку не тільки близьких частот, а й кратних, тобто в n разів більших fET . Для забезпечення стійкої роботи такої ФАПЧ у контурі зворотного зв’язку (рис. 10.48) встановлюється пристрій ділення частоти fвих в n разів.
Важливу роль у структурі ФАПЧ відіграє ФНЧ. Здебільшого це пасивний або активний інтегратор, призначений для зниження пульсацій вихідної напруги ФД. Збільшення постійної часу фільтра підвищує перешкодостійкість, стабільність роботи системи, але в той же час погіршує динамічні властивості, оскільки знижує швидкість відслідковування частоти fET .
На рис. 10.49 приведена функціональна схема генератора К564ГГ1 (CD4046) із зовнішніми елементами, що призначені для забезпечення якісного його функціонування.
Генератор включає в себе безпосередньо керований генератор G, два фазових детектора ФД1 і ФД2 та два підсилювача П1 і П2. Перший підсилювач одночасно здійснює формування прямокутних сигналів для забезпечення якісної роботи ФД1. Підсилювач П2 працює як повторювач. Він має високий вхідний і низький вихідний опори. Завдяки цьому фільтр R3 C2 працює в режимі холостого ходу без впливу зовнішнього навантаження Rн .
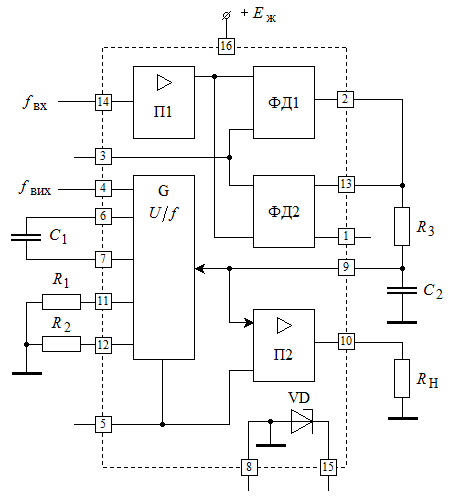
Рис. 10.49
Частота генератора G одночасно визначається зовнішніми елементами R1 , R2 і C1 та зовнішньою керуючою напругою, що подається на вхід 9 мікросхеми. Вхідний опір генератора має такий же порядок (≈ 1012 Ом), що і вхідний опір підсилювача П2. Це має суттєве значення для розрахунку та підбору параметрів елементів фільтра R3 C2 . Частота генерації коливань має лінійну залежність від напруги керування. При R2 = 0 ця залежність визначається рівнянням:
![]() ,
,
де
Kf
– крутизна перетворення [кГц/В], залежить
від параметрів R1
і C1 ;
![]() .
.
При R2 ≠ 0
![]() ,
,
де
![]() – частота генерації коливань при
– частота генерації коливань при
![]() .
.
У довідковій літературі [Зельд.] приводяться детальні діаграми, які дозволяють підібрати параметри R1 , R2 і C1 для вибраного діапазону частот генерації.
Генерація коливань може бути зупинена. Для цього використовується вивід 5, високий рівень сигналу на якому зупиняє роботу генератора і підсилювача П2.
Як вже було сказано вище, мікросхема має два фазових детектори ФД1 і ФД2. Перший з них виконаний на ЛЕ ВИКЛ. АБО, який забезпечує максимальний діапазон автопідгонки при вхідних сигналах, що представляють собою симетричні меандри. При різниці між фазами вхідних сигналів 90 вихідна частота fвих = f0 . Фазовий детектор ФД2 має порівняно складну схемотехніку, і його особливістю є те, що при його використанні скважність вхідних імпульсів не впливає на діапазон автопідгонки. При співпадінні частот і фаз вхідних сигналів вихід 13 перейде у Z-стан, а на виході 1 з’явиться сигнал високого рівня, який повідомляє про синхронність та синфазність двох сигналів – вхідного й сигналу керованого генератора. Ще однією особливістю детектора ФД2 є те, що при його використанні діапазони частот автопідгонки та захоплення однакові й не залежать від параметрів фільтра.
На рис. 10.50 приведена схема генератора прямокутних імпульсів на мікросхемі К564ГГ1, що забезпечує регулювання частоти генерації від нуля герц за допомогою резистора R1 .
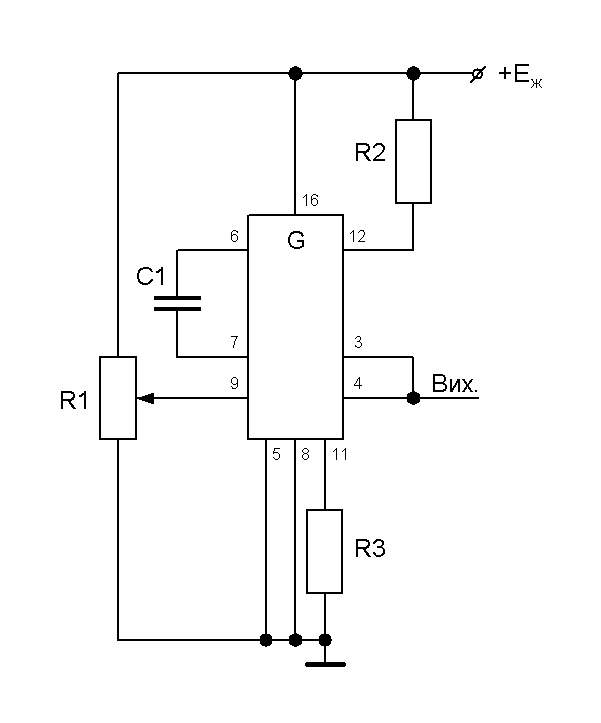
Рис. 10.50
Мікросхема забезпечує стабільну генерацію коливань у діапазоні частот від 0 Гц до 0,8 МГц (при напрузі джерела живлення 15 В) при використанні високоякісних компонентів. Діапазон вибору резисторів R1 , R2 знаходиться у межах від 10 кОм до 1 МОм, а конденсатора C1 – відповідно, від 100 пФ до 1 мкФ. Точні значення параметрів пасивних компонентів розраховуються за допомогою спеціальних номограм, після чого уточнюються при налагодженні.
Мікросхема К564ГГ1 може використовуватись для генерації синхронної сітки частот у складних цифрових та мікропроцесорних системах з різними частотами синхросигналів, у системах точного керованого електропривода та ряді інших пристроїв цифрової електроніки та автоматики.