

 1 Кинематический
анализ механизма
1 Кинематический
анализ механизма
1.1 Структурный анализ
1.1.1.Вычерчиваем структурную схему механизма поперечно-строгального станка
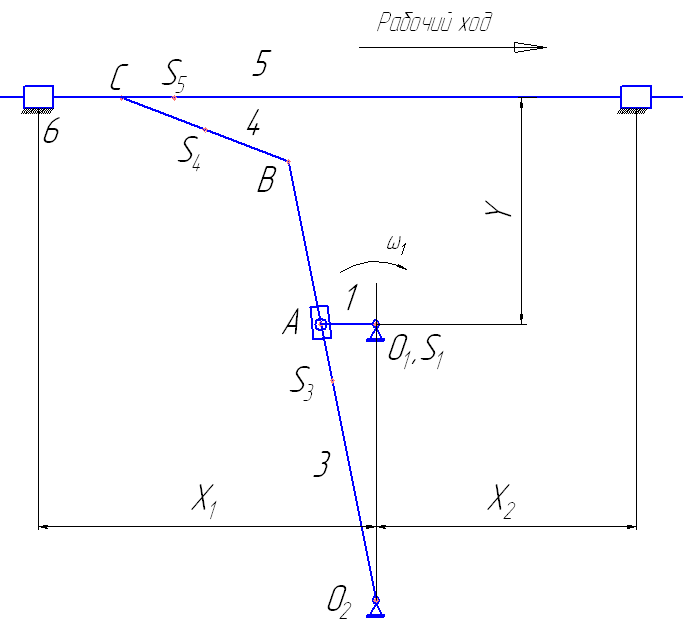
Рисунок 2-Схема механизма поперечно строгального станка
Определим степень подвижности механизма по формуле Чебышева:
W=3n-2P![]() -P
-P![]() ,
(1.1)
,
(1.1)
где n – число подвижных звеньев;
P - число кинематических пар пятого класса;
P - число кинематических пар четвертого класса.
n=5(1,2,3,4,5);
P
=7
; P![]() =0.
=0.
Подставив эти данные в формулу (1.1), получим:
W=3![]() 5-2
7-0=1.
5-2
7-0=1.
При W=1 в схеме механизма одно ведущее звено. Это звено O1A.
Определяем класс механизма. Для этого разобьем механизм на группы Ассура и его класс определим по классификации Ассура-Артоболевского (см.таблицу 1).
Запишем формулу строения механизма:
I(1,6)23(2,3) 22(4,5).
Следовательно,
механизм поперечно – строгального
станка – механизм второго класса, так как наивысший класс присоединенных
групп Ассура – второй.
как наивысший класс присоединенных
групп Ассура – второй.
1.1.2 Построение планов положений исследуемого механизма
Выбираем масштаб длин:
![]() =
=![]() ,
(1.2)
,
(1.2)
=![]() =0,003
=0,003![]() ,
,
где
![]() -
истинная длина кривошипа;
-
истинная длина кривошипа;
O1A– выбранный чертежный размер.
Рассчитаем чертежные размеры звеньев и сведем их в таблицу 1.1.
Таблица 1.1 - Чертежные размеры звеньев
O1A |
O1O2 |
O2B |
BC |
X1 |
X2 |
Y |
40 |
150 |
276 |
97 |
183 |
141 |
123 |
1.2 Построение планов скоростей и ускорений механизма
Построение начинаем от ведущего звена O1A в следующей последовательности:
1. Находим скорость точки A:
![]() =
=![]() ,
(1.3)
,
(1.3)
=7,2 0,12=0,864 м/сек
где
![]() - угловая скорость кривошипа, которую
определяем, используя исходные данные
задания.
- угловая скорость кривошипа, которую
определяем, используя исходные данные
задания.
![]() ;
(1.4)
;
(1.4)
 .
(1.5)
.
(1.5)
Значение угловой
скорости кривошипа будет равно
=const,
тогда
![]() определяем по формуле (1.3)
определяем по формуле (1.3)
2. Из полюса плана скоростей Р откладываем отрезок Рa произвольной длины, изображающий вектор скорости a.
3. Определим масштаб плана скоростей:
![]() =
=![]() =
=![]() =
=![]() =0,0144
=0,0144![]() .
.
4. Для группы Ассура второго класса третьего вида (звенья 2-3) запишем два векторных уравнения для точки A3:
![]()
 =
=
![]() +
+
![]() (1.6)
(1.6)
в |
? |
|
? |
н |
? |
O1A в стор.1 |
AO2 |
=
![]() +
+
![]() (1.7)
(1.7)
в |
? |
0 |
? |
н |
? |
0 |
AO2 |
5. Для группы Ассура второго класса второго вида (звенья 4-5) запишем два векторных уравнения для точки С:
![]() =
=
![]() +
+
![]() (1.8)
(1.8)
в |
? |
из подобия |
? |
н |
? |
из подобия |
BC |
=
![]() +
+
![]() (1.9)
(1.9)
в |
? |
0 |
? |
н |
? |
0 |
XX |
 Уравнения
(1.6) и (1.7) решаем графически, т.е. строим
план скоростей в выбранном масштабе
.
Пересечение линий действия скоростей
Уравнения
(1.6) и (1.7) решаем графически, т.е. строим
план скоростей в выбранном масштабе
.
Пересечение линий действия скоростей
![]() и
и
![]() дает на плане точку a3.
дает на плане точку a3.
6. Скорость точки b, которая принадлежит третьему звену, определим, используя теорему подобия:
o2b
=![]() (1.10)
(1.10)
Данные для каждого положения механизма сводим в таблицу 1.2.
Таблица 1.2 – Значение длины отрезка o2b
Положение механизма |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
O2B, мм |
276 |
276 |
276 |
276 |
276 |
276 |
276 |
276 |
276 |
276 |
276 |
276 |
O2A3, мм |
153 |
167 |
176 |
180 |
176 |
167 |
153 |
137 |
125 |
120 |
125 |
137 |
o2a3, мм |
12 |
38 |
54 |
60 |
56 |
38 |
12 |
20 |
48 |
60 |
48 |
20 |
o2b, мм |
19 |
55 |
74 |
81 |
77 |
55 |
19 |
35 |
93 |
121 |
93 |
35 |
От полюса P необходимо отложить о2b, который лежит на продолжении o2a. Полученный отрезок Pb и будет графическим изображением скорости VB на плане скоростей. Далее, из точки b проводится линия действия скорости VCB, а из полюса Р линия действия скорости VCC6 . Пересечение линий действия этих скоростей дает на плане точку c. Отрезок Рc будет графическим изображением скорости VC. Так графически решаются уравнения (1.8) и (1.9).
7. Далее посередине отрезка Pb и cb отмечаем точки s3, s4 соответственно и соединяем их с полюсом p. Получаются вектора графически изображающие скорости точек s3 , s4 на плане скоростей.
Длины отрезков на плане скоростей сводим в таблицу 1.3.
Таблица 1.3 – Длины векторов плана скоростей
Положение механизма |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
||||
Pa |
60 |
60 |
60 |
60 |
60 |
60 |
60 |
60 |
60 |
60 |
60 |
60 |
||||
a3a |
59 |
47 |
25 |
0 |
25 |
47 |
59 |
57 |
36 |
0 |
36 |
57 |
||||
Pa3 |
12 |
38 |
54 |
60 |
56 |
38 |
12 |
20 |
48 |
60 |
48 |
20 |
||||
Pb |
19 |
55 |
74 |
81 |
77 |
55 |
19 |
35 |
93 |
121 |
93 |
35 |
||||
Pc |
17 |
56 |
84 |
96 |
88 |
63 |
21 |
34 |
96 |
121 |
88 |
29 |
||||
cb |
4 |
10 |
8 |
0 |
8 |
10 |
4 |
6 |
12 |
0 |
12 |
6 |
||||
|
18 |
58 |
85 |
0 |
87 |
62 |
20 |
33 |
94 |
0 |
90 |
30 |
||||
|
9 |
30 |
43 |
48 |
43 |
30 |
10 |
15 |
46 |
60 |
46 |
16 |
||||