

Лабораторная работа № 6
3. Механические бункерные загрузочные устройства для подачи укупорочных элементов в автоматические роторные и конвейерные линии:
3.2. Расчет основных параметров
1. Цель и задачи работы:
- ознакомление с основами расчета бункерных загрузочных устройств для подачи укупорочных элементов в автоматические роторные и конвейерные линии;
- выполнить расчет бункерного загрузочного устройства для подачи укупорочных элементов в автоматические роторные и конвейерные линии.
2. Общие положения (теоретические сведения).
Конструкция механического вертикального БЗУ показана в предыдущей лабораторной работе.
Производительность БЗУ определяется выражением
![]() , (1)
, (1)
где
![]() – окружная скорость захватывающих
органов БЗУ, м/с; t
– шаг захватывающих органов, м;
– окружная скорость захватывающих
органов БЗУ, м/с; t
– шаг захватывающих органов, м;
![]() – коэффициент
выдачи БЗУ.
– коэффициент
выдачи БЗУ.
На основе расчетной схемы (рис. 1) шаг захватывающих органов определим по выражению
![]() ,
(2)
,
(2)
где
![]() – зазор по шагу, м;
– зазор по шагу, м;
![]() – толщина перегородки между захватывающими
гнездами, выбираемая конструктивно, м.
– толщина перегородки между захватывающими
гнездами, выбираемая конструктивно, м.
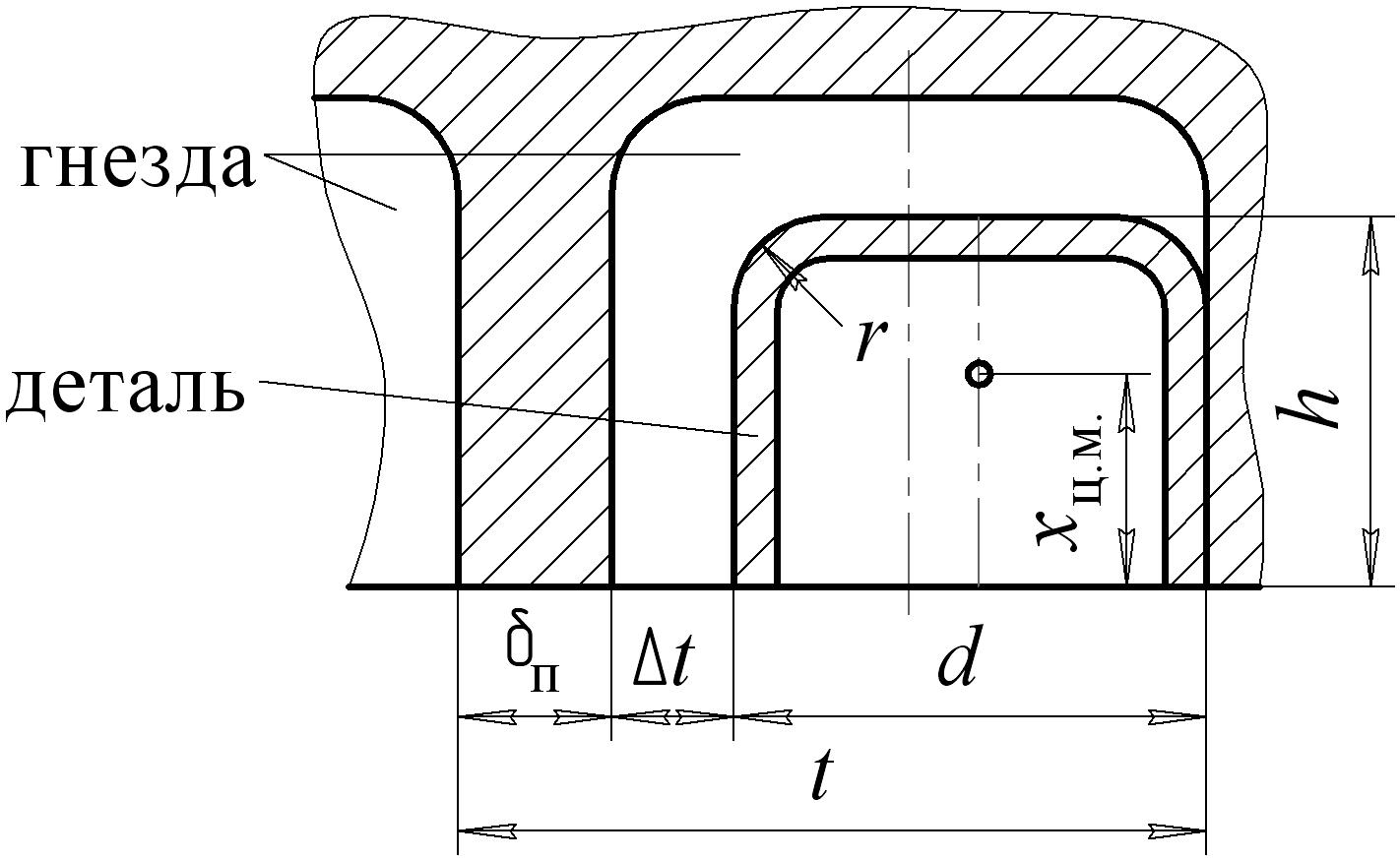
Рис. 1. Схема расположения детали в захватывающем гнезде диска
бункерного загрузочного устройства
Зазор по шагу
![]() обеспечивает захват детали движущимся
гнездом. Так как в вертикальном БЗУ
захват и ориентирование деталей
совмещены, то есть захватывающий орган
БЗУ является также и ориентирующим, то
величина
ограничена возможным западением в
гнездо детали в не требуемом положении.
Поэтому рекомендуют принимать
обеспечивает захват детали движущимся
гнездом. Так как в вертикальном БЗУ
захват и ориентирование деталей
совмещены, то есть захватывающий орган
БЗУ является также и ориентирующим, то
величина
ограничена возможным западением в
гнездо детали в не требуемом положении.
Поэтому рекомендуют принимать
![]() .
(3)
.
(3)
Основываясь на работах В.Ф. Прейса, аналитическую зависимость коэффициента выдачи от окружной скорости захватывающих органов БЗУ будем искать в виде
![]() ,
(4)
,
(4)
где
![]() – наибольшая величина коэффициента
выдачи, соответствующая окружным
скоростям гнезда близким к нулю;
– наибольшая величина коэффициента
выдачи, соответствующая окружным
скоростям гнезда близким к нулю;
![]() – некоторый коэффициент.
– некоторый коэффициент.
Коэффициент определим на основе подхода, предложенного М.В. Медвидем, как произведение двух условных вероятностей
![]() , (5)
, (5)
где
![]() – вероятность нахождения детали на
пути захватывающего органа в требуемом
ориентированном положении;
– вероятность нахождения детали на
пути захватывающего органа в требуемом
ориентированном положении;
![]() – вероятность того, что захвату деталей
гнездом не помешает взаимосцепляемость
деталей.
– вероятность того, что захвату деталей
гнездом не помешает взаимосцепляемость
деталей.
Вероятность
,
входящая в выражение (5), зависит от
вероятностей
![]() ,
того, что деталь ляжет на дно бункера
поверхностью, при нахождении на которой
возможен переход в требуемое ориентированное
положение,
,
того, что деталь ляжет на дно бункера
поверхностью, при нахождении на которой
возможен переход в требуемое ориентированное
положение,
![]() поворота требуемой поверхностью детали
к захватывающему органу и
поворота требуемой поверхностью детали
к захватывающему органу и
![]() отсутствия помех в осуществлении
перехода. Поэтому для нахождения
зависимости, описывающей вероятность
,
были рассмотрены положения, которые
может занимать деталь, засыпанная в
бункер БЗУ.
отсутствия помех в осуществлении
перехода. Поэтому для нахождения
зависимости, описывающей вероятность
,
были рассмотрены положения, которые
может занимать деталь, засыпанная в
бункер БЗУ.
Засыпаемые в бункер детали в форме колпачка могут лечь на дно бункера БЗУ одной из своих поверхностей (рис. 2): закрытым торцом (положение I), открытым торцом (положение II), цилиндрической боковой поверхностью (положения III-VI).
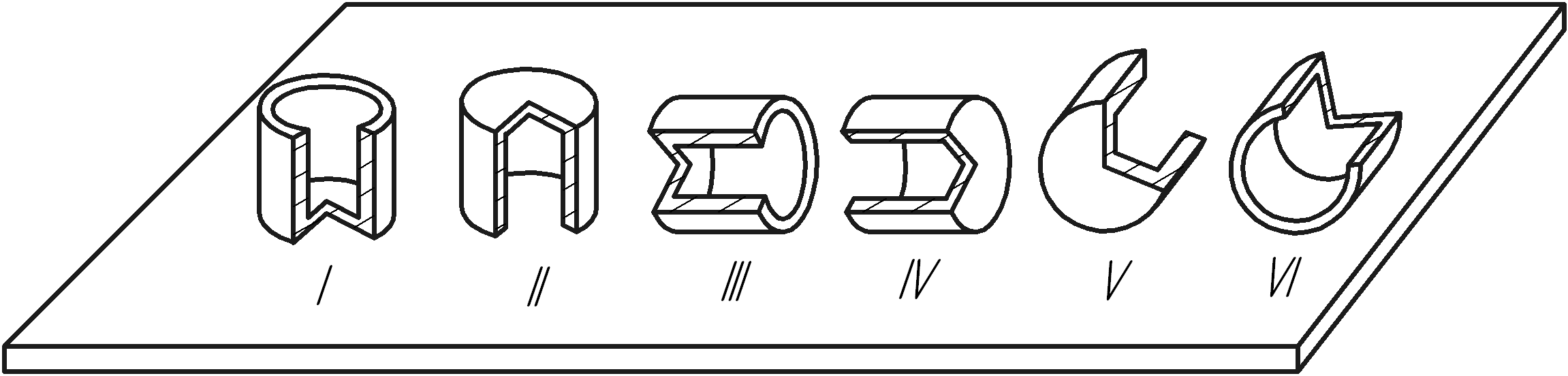
Рис. 2. Положения детали в форме колпачка на дне бункера
вертикального бункерного загрузочного устройства
Обозначим вероятности
того, что деталь ляжет на дно бункера
закрытым торцом, открытым торцом или
цилиндрической боковой поверхностью
соответственно
![]() .
Так как деталь, брошенная на дно бункера,
ляжет на него обязательно какой-либо
из 3-х ограничивающих ее поверхностей,
то
.
Так как деталь, брошенная на дно бункера,
ляжет на него обязательно какой-либо
из 3-х ограничивающих ее поверхностей,
то
![]() . (6)
. (6)
Переход детали в требуемое ориентированное положение III, в котором деталь подходит к диску с захватывающими органами открытым торцом вперед (см. рис.1), возможен из всех положений, кроме положения II (см. рис.2).
Тогда
![]() или с учетом выражения (6)
или с учетом выражения (6)
![]() . (7)
. (7)
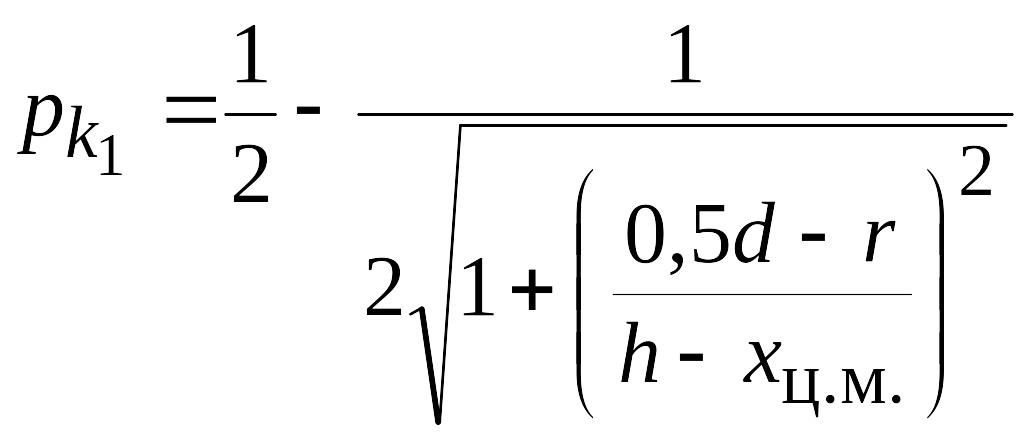
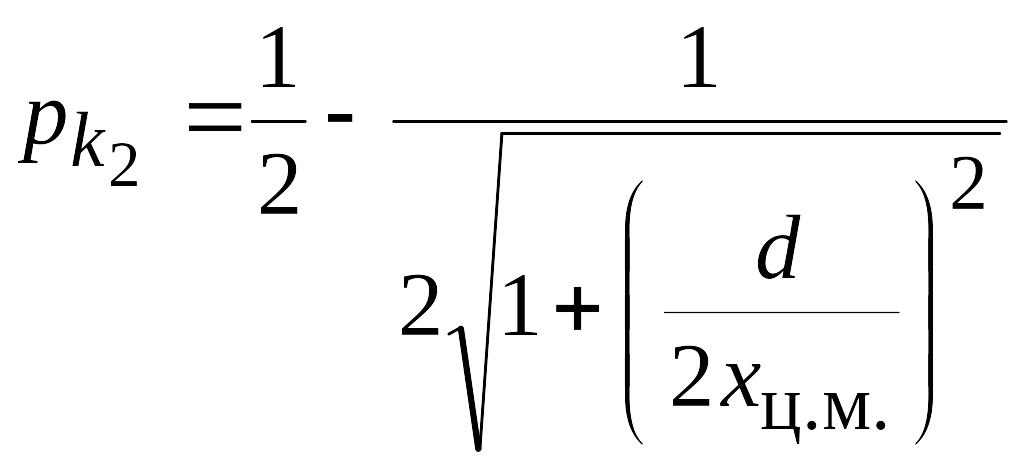
Выражения для
определения вероятностей
![]() ,
,
![]() получены
на основе методики М.В. Медвидя
получены
на основе методики М.В. Медвидя
 ,
,
 ,
(8)
,
(8)
где
![]() – расстояние от плоскости открытого
торца до центра масс детали.
– расстояние от плоскости открытого
торца до центра масс детали.
Вероятность
![]() поворота детали к захватывающему органу
требуемой стороной:
поворота детали к захватывающему органу
требуемой стороной:
 ,
(9)
,
(9)
где
![]() – коэффициент трения деталей о дно
бункера БЗУ;
– коэффициент трения деталей о дно
бункера БЗУ;
![]() – угол наклона дна бункера вертикального
БЗУ к горизонту, град.
– угол наклона дна бункера вертикального
БЗУ к горизонту, град.
Значение угла должно удовлетворять условию
![]() .
(10)
.
(10)
Вероятности
![]() и
определили по выражениям [4]:
и
определили по выражениям [4]:
![]() , (11)
, (11)
 . (12)
. (12)
Выражение для
коэффициента
можно определить из выражений (1), (4),
полагая, что при некоторых значениях
окружной скорости
![]() захватывающих органов производительность
БЗУ будет равна нулю, тогда
захватывающих органов производительность
БЗУ будет равна нулю, тогда
![]() . (13)
. (13)
Известно, что
производительность БЗУ равна нулю в
том случае, если захватывающими органами
БЗУ не будет захвачена хотя бы одна
детали. Другими словами, если деталь в
процессе вращения гнезда с постоянной
окружной скоростью
не сможет запасть на глубину
![]() ,
необходимую для захвата. Найдем предельную
окружную скорость захватывающих органов,
при которой начинается выбрасывание
детали. Вероятность захвата детали
равна нулю, когда величина кинетической
энергии, сообщенной детали движущимся
гнездом, достаточна для выброса детали
из гнезда на высоту y
(рис. 3). Тогда
,
необходимую для захвата. Найдем предельную
окружную скорость захватывающих органов,
при которой начинается выбрасывание
детали. Вероятность захвата детали
равна нулю, когда величина кинетической
энергии, сообщенной детали движущимся
гнездом, достаточна для выброса детали
из гнезда на высоту y
(рис. 3). Тогда
 или
или
 , (14)
, (14)
где m – масса детали, кг; g – ускорение свободного падения, м/с2; y – глубина, при западании на которую в гнездо возможен выброс детали, м.
Рис. 3. Расчетная схема к определению предельной окружной скорости
захватывающих органов
Пользуясь расчетной схемой, можно записать:
![]() ; (15)
; (15)
 , (16)
, (16)
где x
– путь, проходимый диском при западении
детали в гнездо на глубину y,
м;
![]() – время движения диска и детали, с;
– время движения диска и детали, с;
![]() – некоторый угол (см. рис. 3), град.
– некоторый угол (см. рис. 3), град.
Решая совместно уравнения (14) – (16), после преобразований получим выражение для предельной окружной скорости захватывающих органов БЗУ, при которой деталь начинает выбрасываться из гнезда:
 . (17)
. (17)
Подставляя полученные выражения (4), (17) в формулу (1), получим аналитическую модель производительности вертикального БЗУ для заданных параметров детали
 , (18)
, (18)
где ηmax определяется выражениями (5), (7)-(9), (11), (12).
Дифференцируя выражение (18) и приравнивая его нулю можно получить формулу для определения значения окружной скорости захватывающих органов, при которой производительность БЗУ достигает максимального значения
![]() . (19)
. (19)
В соответствии с рекомендациями рабочую скорость захватывающих органов БЗУ следует принимать на 10-20 % ниже максимальной. Тогда с учетом выражения (19) получим
![]() . (20)
. (20)
Пример.
Рассмотрим построение аналитической
модели производительности вертикального
БЗУ для деталей в форме колпачка с
параметрами
![]() м,
м,
![]() м,
м,
![]() м
;
м
;
![]() м,
=0,3.
м,
=0,3.
В соответствии с
исходными данными и рекомендациями
(10) принимаем угол наклона дна бункера
БЗУ
![]() .
.
Шаг захватывающих
органов определим по известному выражению
(4), приняв с учетом рекомендаций (3)
![]() и
и
![]() = 0,01 м. Тогда
= 0,01 м. Тогда
![]() м.
м.
По формулам (8),
(9), (11) вычисляем значения вероятностей
![]() ,
,
![]() ,
,
![]() ,
,
![]() и, подставляя полученные значения в
выражение (7), определяем вероятность
и, подставляя полученные значения в
выражение (7), определяем вероятность
![]() .
По выражению (12) определяем значение
вероятности
.
По выражению (12) определяем значение
вероятности
![]() .
По выражению (5) вычисляем значение
коэффициента
.
По выражению (5) вычисляем значение
коэффициента
![]() .
.
Подставляя исходные данные и полученное максимальное значение коэффициента выдачи в формулу (18), получим аналитическую модель производительности вертикального БЗУ в виде
![]() ,
,
на основе которой строим графики зависимостей коэффициента выдачи и производительности БЗУ от окружной скорости захватывающих органов (рис. 4).

Рис. 4. Графики фактической производительности вертикального
бункерного загрузочного устройства для стальных деталей с параметрами:
м, м, м
Значение максимальной
скорости определим по формуле (19)
![]() м/с.
Тогда максимальная производительность
из формулы (18) составит 175 шт./мин. Рабочая
скорость в соответствии с рекомендациями
(20) не должна превышать значений
м/с.
Тогда максимальная производительность
из формулы (18) составит 175 шт./мин. Рабочая
скорость в соответствии с рекомендациями
(20) не должна превышать значений
![]() м/с,
для которых проектное значение
производительности БЗУ составит 170
шт./мин (см. рис.5).
м/с,
для которых проектное значение
производительности БЗУ составит 170
шт./мин (см. рис.5).
3. Объекты исследования, оборудование, материалы и наглядные пособия.
Основы расчета БЗУ для автоматической подачи укупорочных элементов: кронен-пробок, полиэтиленовых и алюминиевых колпачков.
4. Задание на работу (рабочее задание).
Для проведения работы бригада студентов знакомится с методикой расчета БЗУ для автоматической подачи укупорочных элементов. После этого студентам предоставляются методические указания, и студенты выполняют расчет БЗУ для автоматической подачи укупорочных элементов.
№ вар. |
d, мм |
h, мм |
мм |
|
№ вар. |
d, мм |
h, мм |
, мм |
|
1 |
10 |
8 |
6 |
0,30 |
11 |
10 |
7 |
6 |
0,40 |
2 |
11 |
9 |
6 |
0,30 |
12 |
11 |
8 |
6 |
0,40 |
3 |
12 |
10 |
6 |
0,30 |
13 |
12 |
10 |
6 |
0,40 |
4 |
13 |
11 |
6 |
0,30 |
14 |
13 |
9 |
6 |
0,40 |
5 |
14 |
12 |
6 |
0,30 |
15 |
14 |
9 |
6 |
0,40 |
6 |
15 |
13 |
6 |
0,35 |
16 |
15 |
9 |
6 |
0,45 |
7 |
10 |
8 |
6 |
0,35 |
17 |
10 |
6 |
6 |
0,45 |
8 |
11 |
9 |
6 |
0,35 |
18 |
11 |
10 |
6 |
0,45 |
9 |
13 |
11 |
6 |
0,35 |
18 |
13 |
12 |
6 |
0,45 |
10 |
15 |
11 |
6 |
0,35 |
20 |
15 |
13 |
6 |
0,45 |
5. Ход работы (порядок выполнения работы).
Выполнение работы заключается в расчете основных параметров БЗУ для автоматической подачи укупорочных элементов.
Работу следует выполнять в следующей последовательности:
- ознакомится с методикой расчета БЗУ для автоматической подачи укупорочных элементов;
- выполнить расчет БЗУ для автоматической подачи укупорочных элементов.
6. Содержание отчета.
Отчет должен содержать:
- название работы;
- цель работы;
- расчет БЗУ для автоматической подачи укупорочных элементов;
- выводы по работе.
7. Список использованных источников.
1. Прейс В.В., Давыдова Е.В. Бункерные загрузочные устройства для подачи укупорочных элементов в роторные машины и линии // Известия ТулГУ / Серия. Механика деформируемого твердого тела и обработка металлов давлением. Тула: ТулГУ, Вып.1, 2003. С. 157-163.
2. Давыдова Е.В., Прейс В.В. Аналитическая модель производительности вертикального бункерного загрузочного устройства / Журнал «Сборка в машиностроении, приборостроении» М.: Машиностроение, 2010. №9. С. 27-31.