

3. Методика выполнения разделов курсовой работы
Основные вопросы, касающиеся курсовой работы, прорабатывают в процессе изучения специальных дисциплин, при выполнении лабораторных работ. Но вместе с тем имеется необходимость изложить ряд общих методических положений и требований, которые обеспечат эффективную работу студента над курсовой работой.
3.1. Вводная часть
Во вводной части (введении) курсовой работы рассматривают важность выбранной темы. Необходимо отметить дальнейшее повышение технологического уровня машиностроения, а также повышение качества выпускаемой продукции, которое зависит от квалификации рабочего и от применяемого оборудования.
3.2. Общая часть
Описание металлорежущего станка.
При описании металлорежущего станка согласно заданию на курсовую работу необходимо указать назначение, условия работы, краткую характеристику и эксплуатационные данные, а также необходимо более подробно остановиться на его конструктивных особенностях.
4. Последовательность разработки привода главногодвижения
Привод главного движения металлорежущих станков предлагается разрабатывать в следующей последовательности:
1. выбор исходных данных при разработке привода;
2. обоснование конструкции и компоновки проектируемого узла;
3. определение диапазона регулирования ряда частот вращения шпинделя;
4. определение передаточных отношений передач и чисел зубьев колес;
5. выбор двигателя;
6. определение крутящих моментов на валах;
7. подбор электромагнитных муфт;
8. обоснование применения подшипников конкретного типа;
9. обоснование применения способов смазывания.
В качестве исходных данных при разработке привода главного движения металлорежущего станка необходимо иметь:
- рисунок общего вида металлорежущего станка,
кинематическую схему металлорежущего станка.
5. Кинематический расчет узла
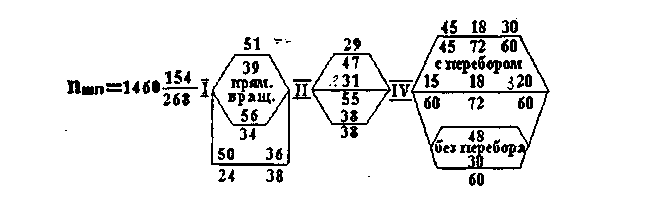
Кинематическая схема станка состоит из цепей передачи главного движения от двигателя к шпинделю и цепей движения подачи от шпинделя к суппорту (на примере токарно-винторезного станка 16К20). Практически на станке могут использоваться только 22 частоты правого и 11 частот левого вращения. Структурная формула привода главного движения станка 16К20 имеет следующий вид:
Частота вращения шпинделя рассчитана по формуле:
![]() , (1)
, (1)
где n — частота вращения шпинделя, об/мин;
v — скорость резания, м/мин;
d — диаметр обрабатываемой детали ,мм.
Изменение частоты вращения шпинделя производится ступенчато в соответствии с геометрическим рядом со знаменателем φ, т.е.
n2 = n1∙φ,; n3 = n2∙φ =п1∙φ 2; n4 = nэ∙φ = n1∙φ 2.
В практике станкостроения φ =1,26; 1,41; 1,58.
Частоту вращения шпинделя для каждой ступени рассчитывают по уравнению кинематического баланса цепи между электродвигателем шпинделем. Минимальная частота вращения (при работе с перебором) будет:
nmin
=
![]() =
12,5
об/мин
=
12,5
об/мин
максимальная частота вращения будет:
nmax
=
![]() =
1600 об/мин
=
1600 об/мин
5.1. Построение графика частот вращения шпинделя
График частот вращения шпинделя строим исходя из кинематической схемы, структурной сетки и уравнения кинематического баланса цепи главного движения, записанного в эмпирическом виде.
Горизонтальными линиями на графике условно изображают вал привода, в том числе и вал электродвигателя. Точки пересечения вертикальных линий с горизонтальными соответствуют частотам вращения в лов, представленным в логарифмическом масштабе. Передачи и их передаточные отношения обозначают линиями (лучами), соединяющими соо ветствующие точки на горизонтальных линиях.
Поскольку частоты вращения даны в логарифмическом масштабе передаточное отношение передачи (отношение частоты вращения ведомого вала к частоте вращения ведущего) i = φк, где к — число интервале между вертикальными линиями, пересекаемые лучом.
Луч с наклоном вправо изображает повышающую передачу (к>0), наклоном влево — понижающую (К<0), вертикальный — передачу с i=1. Параллельные лучи изображают одну и ту же передачу.
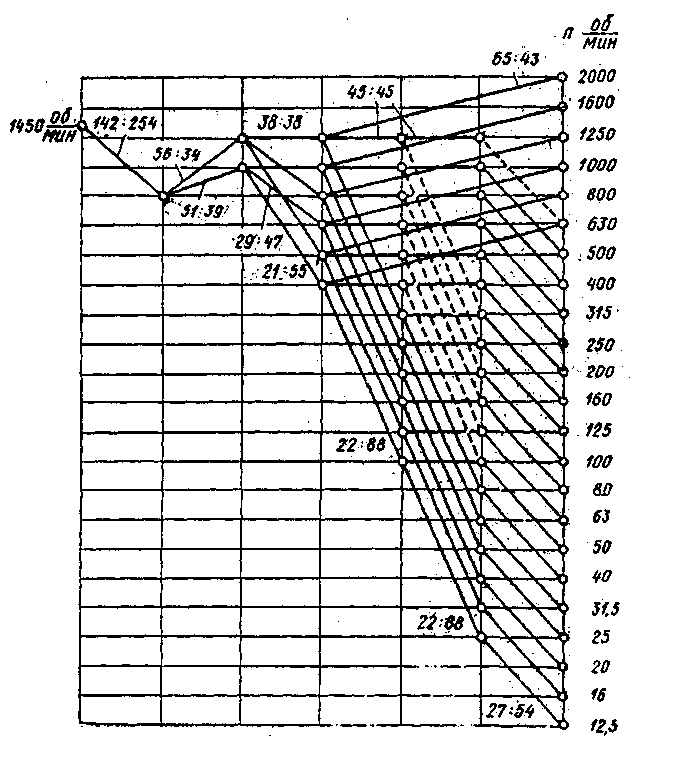
Рис. 3 График частот вращения шпинделя токарно-винторезного станка 1К62