

Работа № 5. Оптимизация двигателя.
Задание
1. Ознакомиться с математической моделью запуска двигателя и составить алгоритм расчета.
2. Рассчитать установившуюся частоту вращения электродвигателя.
3. Рассчитать зависимость времени запуска двигателя от его геометрических параметров: диаметра и длины ротора.
4. Одним из методов одномерной оптимизации определить величину диаметра ротора, обеспечивающего минимальное время разбега двигателя. Проанализировать полученные результаты.
Методические указания
1. В данной работе решается одна из практических оптимизационных задач, возникающих при проектировании технических объектов. Ставится задача оптимизировать электродвигатель по его геометрическим размерам (длине и диаметру), обеспечивающим наилучшие динамические качества электродвигателя.
В качестве критерия, характеризующего динамическое качество, может быть принято время запуска двигателя (разгона до установившейся скорости).
Выберем в качестве параметров оптимизации общепринятые в электромеханике величины – основные размеры машины: диаметр ротора D, конструктивный коэффициент λ, равный отношению длины l к диаметру D:
λ = l/D.
Для построения целевой функции необходимо получить зависимость времени запуска двигателя от параметров оптимизации – диаметра и длины двигателя.
Воспользуемся общепринятым допущением, справедливым в большинстве практических случаев: электромагнитные процессы в электрических машинах протекают на порядок, а то и два быстрее электромеханических, поэтому при выборе основных размеров машины в первом приближении электромагнитными процессами можно пренебречь и рассматривать разбег двигателя с учетом только электромеханических процессов. При этом будет справедливо уравнение [6].
![]() ,
(6.1)
,
(6.1)
где МЭ – электромагнитный момент двигателя; МС – момент сопротивления; Jdw/dt – динамический момент; J – момент инерции всего механизма; w – угловая скорость вращения двигателя.
Решая уравнение (6.1) относительно времени t, получаем:
![]() ,
(6.2)
,
(6.2)
где ωp – установившаяся угловая частота вращения, до которой разгоняется двигатель.
Момент инерции всего механизма будет складываться из момента инерции рабочего органа Jp и момента инерции двигателя. Считаем, что момент инерции Jp приведен к валу двигателя, можно записать:
J = Jp + Jg (6.3)
Момент инерции двигателя зависит от его основных размеров:
Jg = σrλD5, (6.4)
где σr – коэффициент использования геометрии ротора, λ – конструктивный коэффициент, l, D – длина и диаметр ротора.
Введем
относительную скорость вращения и
определим ее:
![]() .
.
Для машин постоянного тока электромагнитный момент двигателя можно записать в виде:
![]() ,
(6.5)
,
(6.5)
где МН – номинальный электромагнитный момент двигателя; mn – кратность пускового момента; w0 – угловая частота вращения при холостом ходе.
Номинальный электромагнитный момент двигателя может быть выражен через его основные размеры:
МН = σλD3, (6.6)
где σ - коэффициент использования машины.
Момент нагрузки, в свою очередь, будет складываться из полезной нагрузки и потерь в машине. В машине будут иметь место потери в подшипниках, в стали, на трение о воздух.
Таким образом, момент сопротивления
МС = МП + МС + МР , (6.7)
где МП – момент трения в подшипниках; МС – момент трения ротора о воздух; Мр – полезный момент.
Перечисленные моменты зависят от частоты вращения и размеров машины, а также от характера нагрузки. Поэтому можно записать:
МС = А +ВλD3۰w+ CλD5 ۰ w2 + … , (6.8)
где А, В и С – коэффициенты, зависящие от конструктивной схемы машины.
Подставляя в уравнение (6.2) выражения (6.4), (6.5), (6.6) и (6.8), получаем
 (6.9)
(6.9)
Для вычисления правой части уравнения (6.9) необходимо определить интеграл. Для этого воспользуемся встроенной процедурой численного интегрирования в Mathcad. Для построения графиков также используем встроенную машинную графику Mathcad.
2. Для вычисления целевой функции tp(D,λ), которая представляет собой определенный интеграл необходимо определить пределы интегрирования. Верхним пределом является установившаяся частота вращения wР . Найдем ее из условия равенства нулю углового ускорения: dw/dt = 0, что означает установившуюся скорость w = const . Тогда приравняв: Мэ. = МН.
получим уравнение для определения w0 :
σλD mn(1 – w)3= А +ВλD3 w + CλD5w2 (6.10)
Задаваясь величиной момента нагрузки и решая уравнение относительно w0, найдем установившуюся частоту. Для этого используется программа «Расчет установившейся частоты», текст которой и пример расчета приведены на рис. 30.
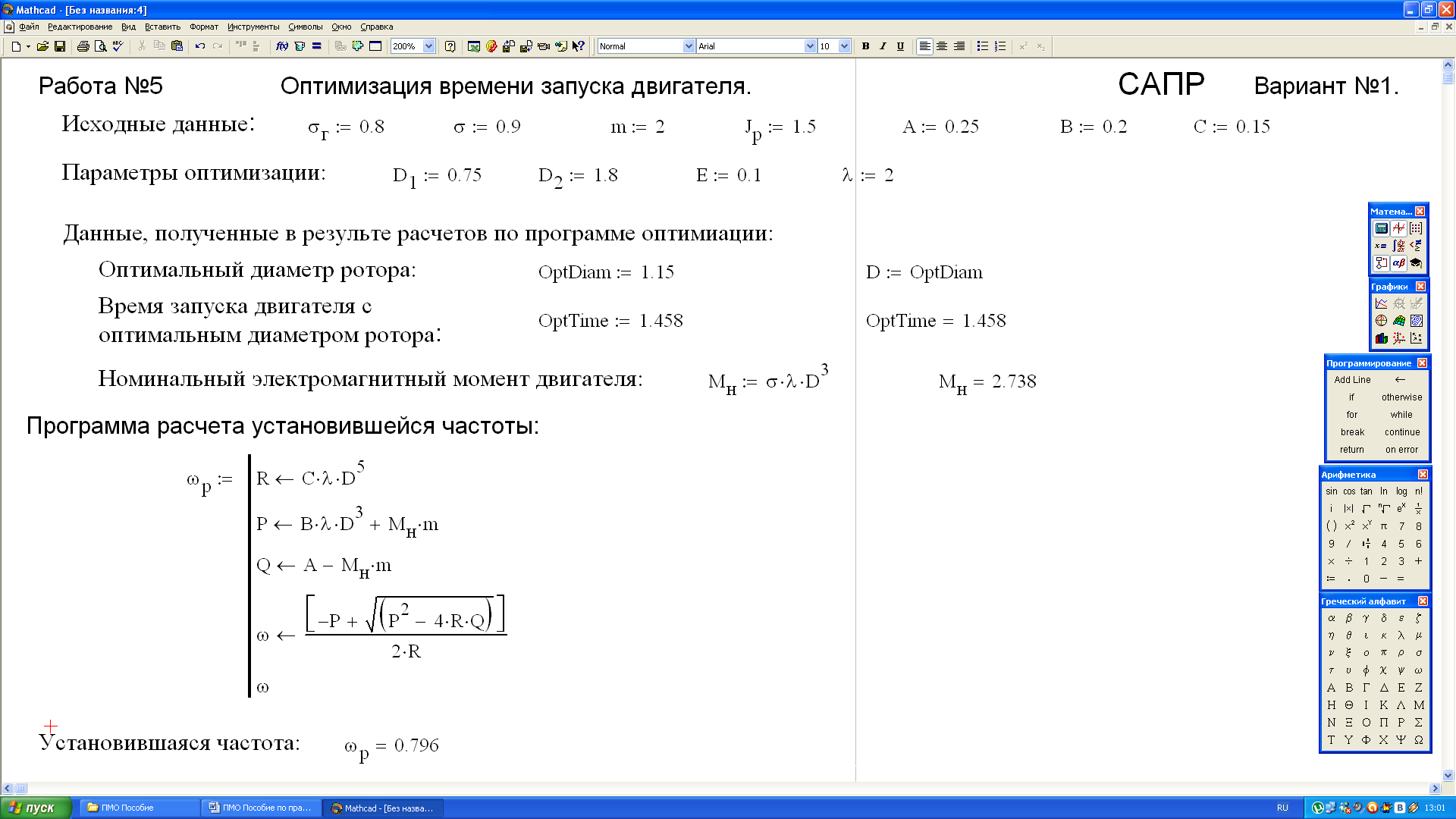
Рис. 30. Программа расчета установившейся частоты.
Параметры, их идентификаторы и числовые значения по вариантам приведены в табл. 5.
Таблица 5.

Для определения области допустимых значений параметров оптимизации и обоснования унимодальности целевой функции tp(D,λ) проведем предварительный анализ. Выражение (6.9) показывает, что зависимость tp (D) от диаметра D при λ = const (см. рис. 31) является унимодальной функцией, и существует оптимальный диаметр двигателя D при конкретном значении λ, при котором обеспечивается наименьшее время разбега. Зависимость tp(λ) от конструктивного коэффициента λ при D = const отражена на графике рис. 32. Увеличение конструктивного коэффициента λ позволяет при уменьшить время разбега. Однако значительное увеличение конструктивного коэффициента нерационально, так как снижение времени разбега замедляется, а изготовление машины усложняется и ухудшаются условия охлаждения.

Рис. 31. График зависимости tp(D). Рис. 32. График зависимости tp(λ).
Программа расчета целевой функции приведена на рис. 33. Там же приведены графики зависимостей целевой функции от параметров оптимизации.

Рис. 33. Программа и пример расчета влияния параметров оптимизации на целевую функцию.
Анализ полученных зависимостей позволяет сделать вывод о «нечувствительности» целевой функции в заданном диапазоне к параметру λ и свести двумерную задачу оптимизации к одномерной, а следовательно применить численные методы одномерной оптимизации.
4. В п. 3 была обоснована правомерность применения численных методов одномерной оптимизации к задаче оптимизации двигателя. Было показано, что целевая функция «нечувствительна» к параметру λ в заданном диапазоне и унимодальна относительно другого параметра оптимизации – D. Таким образом, для оптимизации двигателя можно воспользоваться одним из одномерных методов и программой приведенных в работах № 1–3 равномерного поиска, деления отрезка пополам и «золотого сечения». Значения параметров по вариантам даны в табл. 5.
Программа оптимизации двигателя методом равномерного поиска приведена на рис. 34.

Рис. 34. Программа оптимизации двигателя методом равномерного поиска.
Там же дан расчет оптимальных параметров минимального времени разгона двигателя для отладочного примера.