

Методические указания по выполнению курсовой работы
1 .Размещение двигателей на плане участка цеха
Предприятие подключено к высоковольтной сети напряжением 10кВ. Понижение напряжения осуществляется с помощью трансформаторной подстанции (ТП). На пищевых предприятиях, имеющих взрывоопасные зоны (элеваторы, мукомольные цеха и др.) ТП должны располагаться в отдельных помещениях, которые могут быть встроенными или пристроенными к основным.
В цеховых электрических сетях используются напряжения 660В, 380В, 220В. В данном случае напряжении для питания электродвигателей выбрано, равным 380В. Напряжение 220В используется для питания осветительных приборов. Многие пищевые предприятия относятся к 1-й категории, перерыв в электроснабжении и которых приводит к длительному нарушению технологических процессов. На этих предприятиях применяют двухкамерную подстанцию, обеспечивающую автоматическое включение резервного трансформатора. Электроэнергия подводится к потребителям с помощью экранированных кабелей. Механическая защита обеспечивается помещением кабелей в пластмассовые короба или трубы. Возможны различные варианты подведения электрической энергии от трансформаторной подстанции к электродвигателям. Чаще всего подведение электроэнергии к системе управления электродвигателями производится через РП, (в которых размещены выключатели и предохранители) с помощью трехфазных кабелей с внешней свинцовой оболочкой. Последнее время стало широко использоваться подведение энергии от РП к двигателям с помощью трехфазных медных шин, запрессованных в неорганический жесткий электроизоляционный материал.
Шины выпускаются на напряжения 380В.....10кВ и имеют через необходимые интервалы специальные выводы. К выводам 380В помощью небольших отрезков кабелей подключаются выпрямители и инверторы, расположенные на пульте управления пищевой машины. Управление двигателем данной пищевой машины производится от микроконтроллера, который также расположен на пульте пищевой машины. Такой метод питания пищевых машин оказывается более экономичным по сравнению с обычным.
Студент при выполнении курсовой работы должен отобразить на рисунке 2 схему подведения электрической энергии к каждому электродвигателю для своего варианта задания. Рекомендуется при разработке схемы размещении пищевых машин и схемы подведении к ним напряжения питания использовать опыт решения этой проблемы на предприятии, на котором работает студент.
2.Управление двигателями с помощью программируемых микроконтроллеров фирмы Schnеider Еlесtric
Управление электродвигателями в рассматриваем случае осуществляется микроконтроллерами, пульты управления которых расположены на передних панелях РП1 и РП2 или на передней панели пищевой машины. Микроконтроллер управляет, одним или несколькими электродвигателями. Управление скоростью вращения ротора асинхронных электродвигателей типа А4 производится путем изменения частоты напряжения, питающего обмотки статоров электродвигателей.
На рисунке 3 приведена для примера упрощенная схема построения канала преобразователя, формирующего статорные напряжения электродвигателя, изменяемой по команде от микропроцессора частоты..
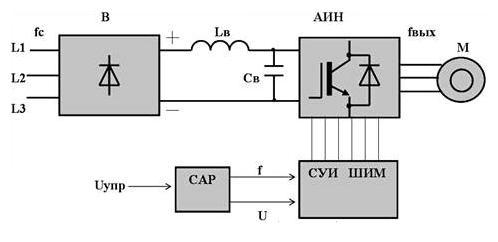
Рис 3 Упрощенная схема построения одного из каналов формирования синусоидальных напряжений изменяющейся частоты для питания обмоток статора электродвигателя.
На рисунке буквой «В» условно обозначен сетевой бестрансформаторный выпрямитель с фильтром нижних частот (LB -CB). Буками «АИН» обозначен инвертор, формирующий синусоидальные напряжения переменной частоты, подводимые к обмоткам статора электродвигателя; На рисунке также приведены квадратики, обозначающие шесть цифро-аналоговых преобразователей (САР), размещенные в микроконтроллере и управляющих каскадами инвертора.
Формирование строго синусоидальных напряжений, частота которых изменяется по команде от микроконтроллера, представляет довольно сложную задачу.
Относительно просто она решается в случае управления маломощными электродвигателями, мощность которых не превышает 30 кВА. В этом случае синусоидальные сигналы требующейся в данный момент частоты, сдвинутые между собой по фазе на 120 градусов могут формироваться в цифровом виде непосредственно в микроконтроллере, преобразоваться в ЦАП в аналоговую форму и затем усиливаться мощными МДП-транзисторами.
Мощные МДП-транзисторы в настоящее время выпускаются на максимальные напряжения 600В и максимальные токи 50А. Семейство выходных статических вольтамперных характеристик МДП-транзистора приведено для примера на рис 4.
Рис.4. Семейство статических вольтамперных характеристик МДП-транзистора.
На характеристиках построены зависимости тока стока Ic.(ось ординат) от напряжения сток- исток (Uси) (ось абсцисс)для различных постоянных значений напряжения затвор-исток (Uзи ),
По оси абсцисс отложено напряжение сток-исток (Ucи ) в Вольтах, а по оси ординат отложен ток стока (Ic) в Амперах.
На этом же рисунке приведены построения показывающие механизм усиления входного управляющего синусоидального сигнала. Рабочая точка (T) выбирается на среднем участке характеристики Uзиз= Uзио, таким образом, чтобы минимизировать нелинейные искажения синусоидального сигнала. На рисунке изображены также входной и выходной синусоидальные сигналы.
Недостатком такого построения инверторного усилителя является необходимость подачи начального смещения по постоянному току на базу трнзистора.
Аналогичный инвертор может быть выполнен также на комплементарном транзисторе (КМДП).
Комплементарный КМДП-транзистор (см. рис. 5) состоят из двух транзисторов (Т1 и Т2) с «п» и «р» проводящими каналами. Затворы и стоки транзисторов объединены при их изготовлении. К истокам транзисторов подключаются клеммы положительного и отрицательного напряжений от источника питания (Еп). На исток транзистора Т2 подается положительное напряжение источника постоянного напряжения питания. Другой вывод источника питания подсоединен к истоку транзистораТ1. Входные напряжения подаются на затворы транзисторов Т1 и Т2.Выходное напряжение снимаются с общей точки соединения стоков.
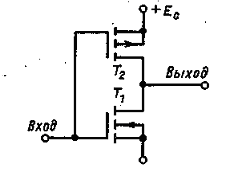
Рис 5. Схема включения комплементарного КМДП-транзистора
В отсутствии входных сигналов на затворах оба транзистора закрыты и через них течет очень маленький ток утечки, равный нескольким наноамперам. Так как сопротивления транзисторов Т1 и Т2 для постоянного тока практически равны между собой, и среднее напряжение источника питания делится пополам и выходное напряжение оказывается, равным Еп/2. При подаче на затворы КМДП-транзистора, положительного сигнала, например положительного импульса открывается транзистор Т1 с «n»-проводящим каналом, но остается зарытым транзистор Т2. Соответственно величина импульсного напряжения на выходе схемы становится равным –Еп/2. При подаче на затворы КМДП-транзистора, отрицательного сигнала открывается транзистор Т2 с «р»-проводящим каналом, но остается зарытым транзистор Т1. Соответственно напряжение на выходе схемы на время длительности импульса становится близким к величине Еп, а амплитуда импульса, равной Еп/2.Величина управляющего напряжения, подаваемого на на затворы транзисторов в 10...20 раз меньше управляемого напряжения, подаваемого на истоки транзисторов. В результате управляемые сигналы на выходе схемы, повторяющие по форме управляющие сигналы, оказываются увеличенными в 10..20 раз по напряжению. Таким образом, КМДП-транзистор в определенных пределах позволяет усиливать без искажений двуполярные сигналы. Это позволяет использовать КМДП-транзистор для формирования с относительно малыми искажениями синусоидальные сигналы необходимой мощности для подачи на статорные обмотки электродвигателей.
В тех случаях, когда мощность электродвигателей больше 30 кВА приходится инвертор выполнять на более мощных транзисторах типа IGBT. Схема трехфазного сетевого выпрямителя и инвертора, выполненных соответственно на шести полупроводниковых диодах и транзисторах типа IGBT приведена на рис.6.
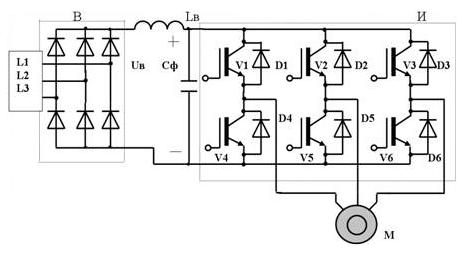
Рис. 6. Схемы сетевого трехфазного мостового выпрямителя (В), фильтра нижних частот и инвертора, выполненного на шести транзисторах типа IGBT.
На рисунке изображена упрощенная схема для случая, когда линейное напряжение трехфазной электрической сети 380 В (вводы L1, L2, L3) подается на трехфазный бестрансформаторный мостовой неуправляемый выпрямитель, выполненный на сборке, состоящей из шести полупроводниковых диодов. Выпрямленное напряжение, величиной около 530 вольт подается через фильтр нижних частот (L-C) на коллекторы и эмиттеры транзисторов инвертора. Синусоидальные напряжения, заданной микроконтроллером частоты, подаются с общих точек стоков транзисторов IGBT
на обмотки статоров, управляемого электродвигателя (М). Для этого от цифро-аналоговых преобразователей, установленных на выходе микроконтроллера, на затворы транзисторов через ЦАП подаются управляющие аналоговые сигналы. На выходе выпрямителя включен фильтр нижних частот, состоящий из индуктивности Lв и емкости Сф, Фильтр не пропускает переменную составляющую напряжения (пульсации выпрямленного напряжения) с выхода выпрямителя на инвертор.
Транзисторы, типа IGBT,представляют собой комбинацию из входного МДП-транзистора, обеспечивающего высокое входное сопротивление, и мощного выходного биполярного транзистора. Транзисторы типа IGBT выпускаются как одиночными, так и в виде IGBT-модулей. Модули- IGBT могут состоять из нескольких пар транзисторов и полупроводниковых диодов. Диоды включенные между эмиттером и коллектором биполярных транзисторов, предохраняют коллекторные переходы от воздействия положительных импульсов, а также обеспечивает температурную компенсацию схемы.
IGBT-модули выпускаются на очень большие токи и напряжения (1800А и 6000 В) и работают в диапазоне частот от нуля до 50кГц, Это позволяет строить на них инверторы для электродвигателей, мощность которых достигает 10 МВт. В
Дискретные IGBT –транзисторы дешевле, но при их использовании не удается реализовать полностью ту мощность, на которую они рассчитаны. Дело в том, что при распайке транзисторов на печатной плате ток, который можно длительно пропускать через паяное соединение, ограничен величиной 100А.
В тех случаях, когда управляемый электродвигатель, оказывается более мощным используются инверторы, выполненные на биполярных транзисторах или тиристорах. Упрощенная схема инвертора, выполненного на мощных биполярных транзисторах, приведена для примера на рис.7.
Рис 7 Упрощенная схема инвертора на мощных биполярных транзисторах.
Рассмотренные выше системы, управляющие по команде от микроконтроллера скоростью вращения ротора электродвигателя, позволяют осуществлять плавный пуск, реверсирование направления вращения ротора, а также оптимизировать режим работы электродвигателя при изменениях тормозящего момента на валу двигателя. Для контроля установившейся скорости вращения ротора электродвигателя на его валу устанавливается тахометр или оптический измеритель скорости вращения ротора. Кроме того. устанавливается датчик Холла, позволяющий измерять мощность на валу двигателя и датчики температуры обмоток статора. Все эти параметры преобразуются с помощью АЦП в цифровой код и вводятся в микроконтроллер, которым они используются для оптимизации режима работы электродвигателя.