

Показатели качества регулирования
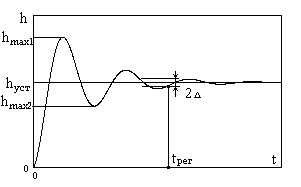
Чаще всего входящие воздействие изменяется ступенчато и реакция системы на это воздействие при нулевых н.у. является переходным процессом. Если н.у. нулевые только для производных и ступенчатое воздействие не единичное, график реакции системы или объекта называют кривой разгона.
1 – аппериодические процессы.
2 – затухающие колебательные процессы.
В качестве показателей качества регулирования из переходного процесса рассчитывают следующие показатели
1.Время регулирования - время, по истечении которого кривая переходного
процесса заходит
в
![]() - окрестность установившегося значения
и больше не выходит за пределы
окрестности).
- окрестность установившегося значения
и больше не выходит за пределы
окрестности).
-обычно равно 3,5,10% от установившегося значения ( hуст – предельное значение к которому стремится переходной процесс при t стремящемся к бесконечности):
![]() .
.
2.Установившаяся ошибка: еуст=hз-hуст .
Чем меньше ошибка, тем точнее отрабатывается задание в установившемся режиме.
3. Перерегулирование
![]() .
.
Для систем, величина перерегулирования допустима 20-35%, может быть 0%.
4. Период колебаний, т.е. расстояние между соседними максимумами или минимумами.
Декремент затухания
![]()
Помимо прямых показателей качества используются достаточно часто интегральные показатели:
![]()
e(t)=hзад-h(t).
Линейный интегральный показатель: i =1, квадратичный интегральный показатель ошибки: i=2, и т.д. Чаще всего применяют квадратичный показатель т.к. если переходные процессы колебательные, то ошибка меняет знак и интеграл от знакопеременного процесса может оказаться малым, хотя амплитуда колебаний достаточно большая.
Помимо этих показателей, для того чтобы выделить влияние отдельных участков переходного процесса используют интегральные показатели с весовыми функциями
![]() ,
,
где f(t) – весовая функция времени. В простейшем случае f(t)=t, что ослабляется влияние начального участка, но усиливается влияние конечного участка интегрирования.
Синтез замкнутых систем управления по ошибке при заданной структуре системы.
Предполагается
что передаточные функции всех элементов
системы, в том числе формирователя
управляющего воздействия известны, но
для формирователя известна общая формула
передаточной функции, а конкретнее
значения коэффициента подлежат
определению в зависимости от поставленных
требований к системе. В качестве
формирователя управляющего воздействия
достаточно часто используется ПИД –
регулятор с передаточной функцией
![]() ,
,
![]() ,
,![]() ,
,![]() - коэффициенты
передачи пропорциональной, интегрирующей
и дифференцирующей составляющей
регулятора.
- коэффициенты
передачи пропорциональной, интегрирующей
и дифференцирующей составляющей
регулятора.

Управляющее воздействие на выходе регулятора
Выбор составляющих регулятора определяется из следующих соображений:
- пропорциональная
часть формирует управляющие воздействие
пропорционально величине ошибки (![]() )
и она убирает
основную часть ошибки;
)
и она убирает
основную часть ошибки;
- интегральная составляющая необходима для сведения ошибки к 0 в установившемся режиме, т.к. какая бы не была мала ошибка, интеграл со временем может стать достаточно большим. Эта же составляющая накапливает некоторое постоянное (номинальное) значение в управлении, соответствующее номинальному значению задания;
- дифференциальная составляющая упреждает нарастание ошибки, поскольку она пропорциональна скорости и даже при малых значениях ошибки, когда первые две составляющие незначительны, скорость может быть большая, и если не упредить нарастание ошибки, то она также может возрасти до больших значений.
Задача синтеза
заключается в определении
,
,![]() .
Они могут подбираться
путем анализа частотных характеристик,
либо чаще всего рассчитываются из
условия достижения экстремума некоторых
показателей качества регулирования:
минимума времени переходного процесса
при ограничении на величину управляющего
воздействия, величину перерегулирования,
минимума интегральной квадратичной
ошибки при ограничениях на прямые
показатели и т.д.
.
Они могут подбираться
путем анализа частотных характеристик,
либо чаще всего рассчитываются из
условия достижения экстремума некоторых
показателей качества регулирования:
минимума времени переходного процесса
при ограничении на величину управляющего
воздействия, величину перерегулирования,
минимума интегральной квадратичной
ошибки при ограничениях на прямые
показатели и т.д.
Для того, чтобы решить задачу поиска коэффициентов, а именно определить minI(K)(вектор коэффициентов К) из области допустимых значений, обеспечиваемых минимум критерия J необходимо выразить этот критерий как функцию от , , а затем записать и решить относительно этих коэффициентов систему уравнений:
Если найденный вектор попадает в область допустимых значений и выполняются все ограничения – задача решена. Чаще задачу решают численным методом, поскольку выразить аналитически критерий через коэффициенты Ки , Кд и Кп достаточно сложно, точка экстремума может находиться вне области допустимых значений коэффициентов, экстремальные коэффициенты не обеспечивают выполнение ограничений.
Чтобы решить задачу численным методом необходимо записать систему уравнений для всех элементов системы уравнения, включая объект, датчик, исполнительный механизм, передатчик и регулятор, преобразовать в конечно- разностную форму дифференциальные уравнения, задать начальные значения коэффициентов, решить систему уравнений для интервала времени (0;t), в течение которого переходный процесс с погрешностью ∆ сходиться к установившемуся значению, и вычислить значение критерия I.
Например, для
средней квадратичной ошибки
![]()
Изменяя значения коэффициентов , , в соответствии с выбранным методом поиска экстремума, вычисляя новые значения критерия и сравнивая с предыдущими, находим набор коэффициентов, обеспечивающий экстремальное значение критерия и выполнение ограничений.
Алгоритм для метода покоординатного спуска
1.Задаем начальные значения Кп, Ки, Кд, начальный шаг изменения коэффициентов ∆К, допустимую погрешность поиска экстремума едоп, вычисляем I.
2. Изменяем Кп=Кп+∆К. Вычисляем критерий, сравниваем с предыдущим. Если критерий уменьшился – снова изменяем Кп, вычисляем I, сравниваем с предыдущим и так до тех пор пока не произошло увеличение критерия или значение коэффициента не вышло за допустимую область, тогда переходим к следующему пункту; если же на первом шаге критерий увеличился или значение коэффициента вышло за допустимую область, изменяем знак ∆К, вычисляем Кп=Кп+2∆К, находим значение критерия и сравниваем с предыдущим. Если критерий не изменился, или увеличился, или значение коэффициента вышло за допустимую область – переходим к п.3, если уменьшился, повторяем вычисления Кп=Кп+∆К и I до тех пор, пока не произойдет увеличение или значение коэффициента не выйдет за допустимую область, тогда переходим к следующему пункту.
3. Возвращаем предыдущее значение Кп, т.е. Кп=Кп-∆К, и предыдущее значение критерия (наименьшее из найденных)
4. Аналогично п.2, 3 изменяем Ки и Кд. Проще всего при программной реализации индексировать коэффициенты (К1, К2, К3) и изменять индекс в цикле.
5. Если при прохождении п.2, 3, 4 критерий улучшался, возвращаемся к п.2, если же улучшения не было, то уменьшаем шаг ∆К (обычно в 2 раза) и возвращаемся к п.2. Уменьшение шага производится до тех пор, пока он не станет меньше заданной погрешности оценки экстремума ∆К<едоп.
После расчёта коэффициентов необходимо построить переходный процесс, функцию ошибки и управления чтобы проверить выполнение ограничений.
Оценка показателей качества регулирования
Расчёт реакции системы на типовое воздействие в установившемся режиме
1.
![]() .
.
Необходимо найти
![]()
g(t)
e(t)
у(t)
Wп(p)





e(t)=g(t)-y(t)=g(t)-Wn(р)*e(t)![]()
![]()
![]()
![]() .
.
Так как изображение по Лапласу единичной ступенчатой функции равно
![]() ,
то
,
то
![]() .
.
Если
 ,
то
,
то
![]()
Как известно, по
правилу предельного перехода
 ,
тогда
,
тогда
![]()
Чем больше Кп, тем
меньше величина установившейся ошибки,
но она не будет равна 0 и она называется
статической. Для того чтобы установившаяся
ошибка была равна нулю, нужно чтобы в
числителе последнего выражения был
множитель s
или знаменатель передаточной функции
прямой цепи имел множителем s
в какой либо степени, не равной нулю:
![]() .
.
В этом случае установившаяся ошибка
 .
.
Такая система называется астатической с порядком астатизма ν. Для того, что бы система была астатической надо, чтобы прямая цепь содержала ν интегрирующих звеньев.
Коэффициент |
|
![]() называют коэффициентом
статической ошибки.
называют коэффициентом
статической ошибки.
2. Входное воздействие
линейно зависит от t:
![]()
![]()
Тогда:
![]()
Если
![]() ,
то ошибка стремится к бесконечности.
,
то ошибка стремится к бесконечности.
Если
![]() ,
то ошибка равна
,
то ошибка равна
![]() ,
а коэффициент
скоростной ошибки равен
,
а коэффициент
скоростной ошибки равен
![]() .
.
Если
![]() =2,
то
=2,
то
![]() =0.
=0.
Если записать Е(s)=Wge(s)*G(s) и разложить Wge(s) в ряд Тейлора по переменной s в окрестности 0
![]() ,
то
,
то
![]() ...
.
...
.
Для того, что бы уменьшить установившуюся ошибку – необходимо увеличить порядок астатизма системы, но стоит учитывать что это ведет к ухудшению устойчивости.