

16. Классификация промышленных роботов.
По характеру выполняемых операций ПР подразделяют на:
· производственные, непосредственно участвующие в производственном процессе и выполняющие основные операции типа сварки, гибки, окраски, сборки и т.д.;
· подъёмно-транспортные (вспомогательные) ПР, используемые для установки-снятия деталей и инструмента, обслуживания транспортеров и
складов и т.д.;
· универсальные роботы, выполняющие как основные, так и вспомогательные операции.
По виду производства различают ПР, используемые в литейном, кузнечно-прессовом, сварочном производствах, при механической обработке, термообработке, нанесении покрытий, сборке, автоматическом контроле, транспортно-складских работах и т.д.
По степени специализации ПР делят на:
· специальные
· специализированные
· универсальные
По грузоподъемности различают ПР:
· сверхлёгкие (номинальная грузоподъемность до 1 кг);
· лёгкие (номинальная грузоподъемность свыше 1 до 10 кг);
· средние (свыше 10 до 200 кг);
· тяжёлые (свыше 200 до 1000 кг);
· сверхтяжёлые (номинальная грузоподъемность свыше 1000 кг).
По числу степеней подвижности выпускают роботы с двумя, тремя, четырьмя и более четырех степенями подвижности.
По возможности передвижения ПР подразделяют на:
· стационарные
· подвижные
По способу установки на рабочем месте различают ПР:
· Напольные
· Подвесные
· Встроенные
По виду управления ПР подразделяют на:
· роботы с программным управлением (цикловым, числовым, позицион-
ным, контурным);
· роботы с адаптированным управлением (позиционным, контурным).
По служебному назначению можно выделить:
· исполнительные ПР
· обслуживающие ПР
· транспортные ПР
17. Принципиальное устройство промышленного робота.
Исполнительное устройство ПР выполняет все его двигательные функции. В исполнительное устройство входит манипулятор и в общем случае устройство передвижения ПР. Манипулятор состоит из несущих конструкций, приводов, исполнительных и передаточных механизмов. Каждая степень подвижности манипулятора имеет свой двигатель (пневматический, электрический, гидравлический).
Исполнительный механизм ПР (механическая рука) осуществляет ориентирующие и транспортирующие движения. Чаще всего он имеет шарнирное исполнение. Рабочим органом ПР является захватное устройство (сварочные клещи, окрасочный пистолет, сварочный инструмент и т.д.) – захватывает и удерживает объекты, перемещаемые манипулятором. Современные ПР комплектуют набором типовых захватных устройств.
Устройство управления ПР служит для формирования и выдачи управляющих воздействий исполнительному устройству в соответствии с управляющей программой. В устройство управления, как правило, входят: пульт управления; запоминающее устройство, в котором хранятся программы и другая информация; вычислительное устройство и блок управления приводами манипулятора и устройства передвижения.
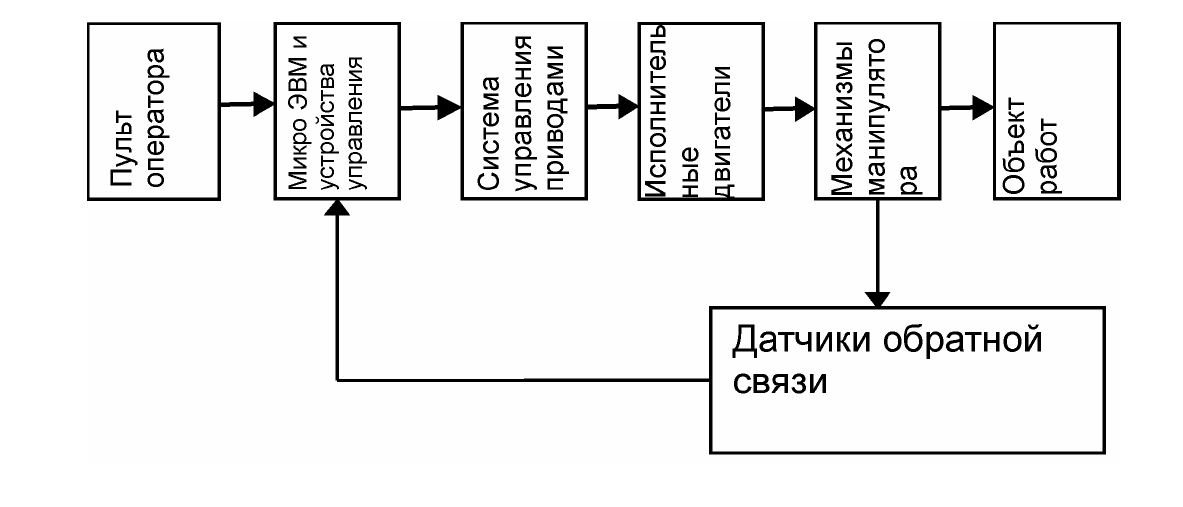
Информационная система обеспечивает сбор и передачу в устройство, управления данных о состоянии окружающей среды и функционировании механизмов ПР. В эту систему входит комплект датчиков обратной связи различного назначения, устройство обратной связи, устройство сравнения сигналов.