

1.6 Синхронизация оборудования ахе10

Рисунок 1.11 – Синхронизация оборудования АХЕ10
1.6.1 В подсистему GSS включаются устройства системы синхронизации, которая распределяет тактовые импульсы и сигналы синхронизации. Основным компонентом данной системы являются модули тактовых генераторов CLM. В станциях АХЕ10 используются три тактовых генератора. В модуле синхронизации АХЕ810 внутри каждого CLM два генератора, поэтому в ее систему синхронизации входят два CLM. Один из генераторов работает как основной, второй – резервный. Если станция работает в качестве основного узла системы сетевой синхронизации, задействуются генераторы RCM и CCM. Для обеспечения сетевой синхронизации имеются интерфейсы для выделения входящих эталонных сигналов (ICM).
1.6.2 АХЕ поддерживает следующие режимы синхронизации:
плезиохронный, от собственного эталонного генератора ССМ в случае потери тактовых сигналов от внешних источников синхронизации;
принудительная синхронизация от эталонных сигналов, выделяемых из входящих трактов ИКМ, или от других внешних источников (например, от мультиплексора SDH). Выделение сигналов обеспечивает модуль ICM, который конвертирует внешние сигналы в формат 8 кГц и распределяет их по CLM;
принудительная синхронизация от автономных высокоточных синхрогенераторов СВС фирмы Ericsson или от GPS (системы глобального позиционирования). СВС – сетевой блок синхронизации, не относящийся к АХЕ. СВС представляет собой полностью резервируемую автономную аппаратуру синхронизации, оснащенную приемником системы GPS и встроенными рубидиевыми генераторами.
1.7 Электронная управляющая система
1.7.1 APZ имеет иерархическую структуру. Высший уровень управления – блоки центрального управления, которые образуют подсистему центрального процессора CPS. CPS состоит из сдвоенного процессора СР-А и СР-В. Стороны А и В работают синхронно, принимают и выдают команды в RP. RP принимает команды, проверяет на четность, но выполняет команду ведущей стороны (ведущего процессора).
Рисунок 1.12 – Структура ЭУС
Таблица 1.2 – Характеристика APZ
Тип APZ |
Абонентская емкость |
Производительность (ВНСА) |
APZ 210 |
до 36 000 |
144 000 выз/ЧНН |
APZ 211 |
до 40 000 |
150 000 выз/ЧНН |
APZ 212 |
до 200 000 |
800 000 выз/ЧНН |
APZ 213 |
до 2 000 |
11 000 выз/ЧНН |
Рисунок 1.13 – Состав APZ 211
К/от RP
К/от RP
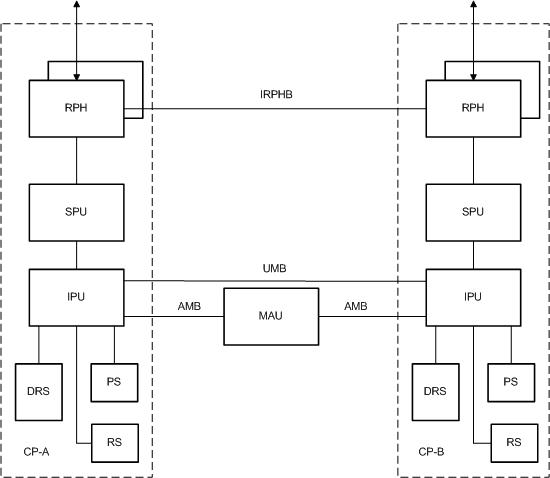
Irphв – внутренняя шина контроллера регионального процессора
RPH – контроллер регионального процессора
SPU – процессор сигнализации
IPU – процессор инструкций
DRS – память данных
PS – память программ
RS – память ссылок
UMB – шина коррекции данных
MAU – узел автоматического технического обслуживания
AMВ – шина автоматического технического обслуживания
Рисунок 1.14 – Состав APZ 212 20
Высокая производительность APZ 212 20 обеспечивается за счет использования в узле центрального процессора двух разделенных процессоров: SPU (процессор сигнализации) и IPU (процессор инструкций). IPU управляет работой программ. SPU обеспечивает обработку сигнализации о событиях, обеспечивает подготовку и выполнение команд для исполнительной части коммутационной станции.
Таблица 1.3 – Сравнение управляющих систем APZ 212
Параметр |
Тип APZ |
|||
APZ 212 20 |
APZ 212 30 |
APZ 212 33 |
APZ212 40* |
|
Увеличение производительности |
1 |
3…3,5 |
>5…6 |
10 |
Макс. память данных (DS) |
1,5 GW16 |
4 GW16 |
4 GW16 |
7,5 GW16 |
Макс. память программ (PS) |
64 MW16 |
96 MW16 |
96 MW16 |
96 MW16 |
Макс. память ссылок (RS) |
2 MW16 |
32 MW16 |
32 MW16 |
32 MW16 |
Кол. RP |
1024 |
1024 |
1024 |
1024 |
Кол. стативов процессора |
2 |
1 |
1 |
1 |
Кол. типов плат |
15 |
13 |
13 |
8 |
Кол. плат |
103 |
65 |
65 |
18 |
GW16 – Гигаслов 16-тиразрядных (230 слов)
MW16 – Мегаслов 16-тиразрядных (220 слов)
1.7.2 Подсистема RPS позволяет разгрузить центральный процессор от решения простых задач, потребность в которых определяется работой системы в реальном масштабе времени.
RP выполняют следующие функции:
обработка результатов сканирования, тестирования и операции с блоками аппаратного обеспечения;
обмен сигналами с СР;
выполнение задач, поставленных СР;
контроль и управление работой собственных аппаратно-программных средств.
выполнение задач обработки протоколов.
Число RP определяется размерами станции и типом управляющей системы.
RP подключаются к СР через дублированную шину RPB (рисунок 1.15). Каждая шина в APZ 211 может обслуживать до 128 RP, в APZ 212 – до 32 RP. Общее количество RP в составе APZ211 до 512, в APZ212 – до 1024.
Региональные процессоры RP непосредственно имеют связь с АРТ. Оборудование, которым управляют RP, называется ЕМ – модули расширения. Фактически ЕМ – часть аппаратно-программных средств RP, т.е. RP, как бы, представляют собой децентрализованное управляющее устройство. Два RP (пара RP) обслуживают до 16 ЕМ. В состав каждой платы оборудования АРТ входит процессор DP.
.
CPA, CPB – центральные процессоры (сторона А и сторона В)
RPB – шины RP
RP – региональный процессор
EMB – шина EM
EM – модуль расширения
D
RP31
(APZ212)
RP127
(APZ211)
Рисунок 1.15 – Иерархия процессоров
В подсистему RPS входят несколько типов региональных процессоров (рисунок 1.16):
RР – стандартный региональный процессор;
RPD – цифровой региональный процессор расширенного модуля, имеет производительность выше, чем стандартный RР. Используется для обработки больших комплексных программ, выполняя часть функций СР;
RPA – конвертор шины RР (интерфейс для процессора поддержки SP), входит в состав группы ввода/вывода;
STC – центральный сигнальный терминал для организации взаимодействия по протоколу ОКС№7 с удаленными блоками ступени АИ (RSS);
STR – удаленный сигнальный терминал в составе RSS;
SP – процессор поддержки (вспомогательный процессор), обеспечивает выполнение функций ввода/вывода.

EMRD – модуль расширения цифрового регионального процессора расширенного модуля
EMRP – модуль расширения стандартного регионального процессора
STR – удаленный сигнальный терминал
EM – модуль расширения
SP – процессор поддержки (вспомогательный процессор)
RPD – цифровой региональный процессор расширенного модуля
RР – стандартный региональный процессор
STC– центральный сигнальный терминал
RPBC – конвертор (обработчик) шины регионального процессора
RPA – конвертор шины RР (интерфейс для SP)
RPB – шины региональных процессоров
CP – центральный процессор
Рисунок 1.16 – Конфигурация подсистемы региональных процессоров