

Лабораторная работа №2. Моделирование динамических звеньев линейных сау.
Цель работы:
Целью работы является ознакомление с классификацией динамических звеньев систем автоматического управления, их математическим описанием и характеристиками и способами моделирования типовых звеньев на ЭВМ.
Краткие сведения из теории:
Для исследования САУ составляется математическое описание - математическая модель системы. Для этого система разбивается на звенья - части, которые обладают достаточно простым математическим описанием и динамическими характеристиками.
Динамическим звеном называется выделенная часть САУ любого физического и технического исполнения, описываемая определенными дифференциальными уравнениями.
Типовым называется звено, описываемое дифференциальным уравнением не выше второго порядка.
Исходные данные:
Моделировать усилительное (безинерционное) звено с коэффициентом К.
К
20
2
Моделировать апериодическое звено первого порядка с коэффициентом усиления К и постоянной времени Т:
К |
6 |
Т, с |
0.4 0.1 |
3…5 Моделировать колебательные звенья второго порядка : затухающее ( сходящееся), консервативное и неустойчивое ( расходящееся) с параметрами К, Т,
К |
5 |
Т, с |
0.2 |
Коэффициент демпфирования
Затухающее звено |
0.12 0.01 |
Консервативное звено |
=0 |
Неустойчивое звено |
0.015 |
6. Моделировать апериодическое звено второго порядка, с параметрами К, Т,
К |
3.5 |
Т |
0.2 |
|
1.008 1.08 |
7. Моделировать идеальное интегрирующее звено с коэффициентом усиления К ( принять Т=1):
Т, 1/с |
1.2 |
8. Моделировать инерционное (реальное) интегрирующее звено с коэффициентом усиления К и Т ( принять = 0)
К,1/с |
1.35 |
Т, с |
0.6 |
9. Моделировать изодромные интегрирующие звенья с параметрами К и (принять Т = 1)
К, 1/с
|
0.9 |
, с |
1.6 |
Задание к работе и порядок выполнения.
Проследить на дисплее ЭВМ переходные процессы для всех динамических звеньев при всех возможных видах воздействий;
Исследовать влияние параметров . и Т, , на характер переходных процессов 2-3 звеньев.
Выполнение работы.
4.1. Усилительное звено .
Усилительное (безинерционное звено ) звено описывается линейным алгебраическим уравнением
Где - коэффициент усиления ( передачи звена)
Структурная схема
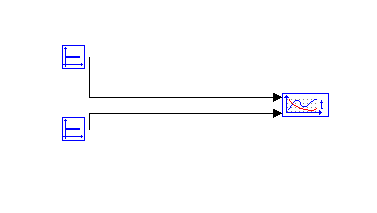
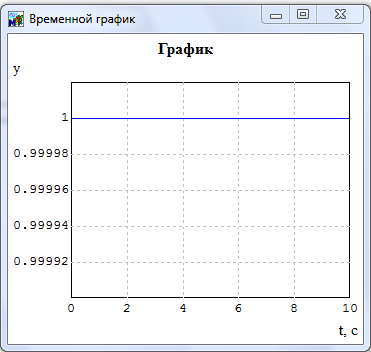
Вывод: необходимости в интегрировании нет.
4.2.Апериодическое звено I порядка.
Это звено описывается дифференциальным уравнением
(Tp+1)y(t)=kx(t)
Для решения на ЭВМ уравнение преобразуется к виду
Py=1/T(kx-y).
Структурная схема
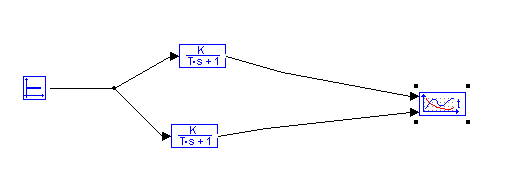
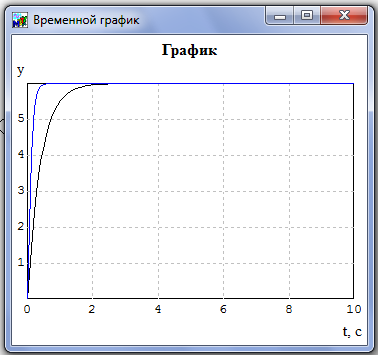
Вывод: скорость нарастания выходной величины пропорциональна времени взаимодействия. Текущая разница по скорости постоянна.
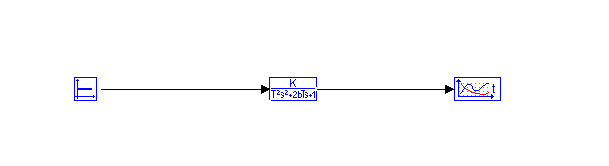
4.3…5 Позиционные звенья II порядка.
Четыре типовых звена описываются уравнениями:
(T2p2+2 Tp+1)y(t)=kx(t)
И отличаются друг от друга значением коэффициента демпфирования.
Уравнение приводится к виду:
P2y=1/T2(kx-2 Tpy-y)
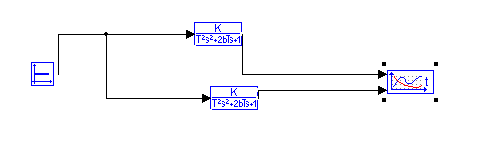
Структурная схема
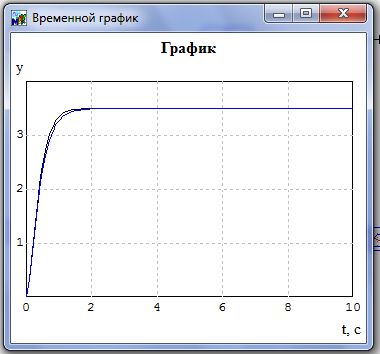
Колебательное звено второго порядка: затухающее (сходящееся)
Вывод: переходная функция показывает, что у колебательного звена процесс изменения выходной величины во времени, вызванной единичным ступенчатым воздействием, является I(t) колебательным затухающим.
Структурная схема
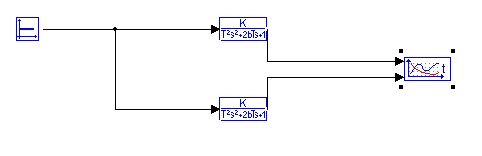
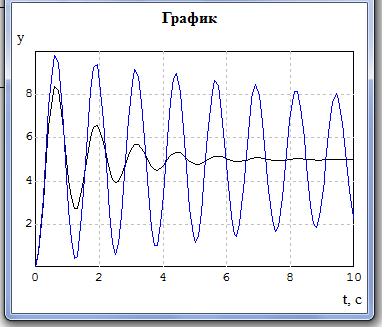
Колебательное звено второго порядка : консервативное.
Вывод: при >1, корни знаменателя передаточной функции будут отрицательные действительные.
Структурная схема
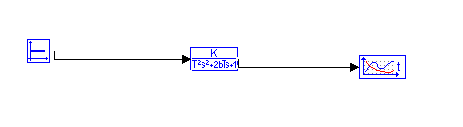
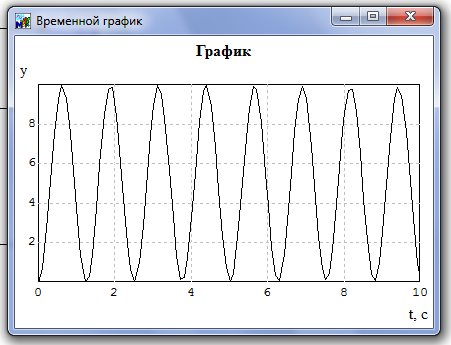
Колебательное звено второго порядка: неустойчивое (расходящееся):

Вывод: переходная функция показывает ,что процесс изменения выходной величины во времени является затухающим.
4.6.Структурная схема
Апериодическое звено второго порядка
Вывод: частный случай: наличие инерционных свойств звена, отсюда -тенденция к раскачиванию. Характерно действие диссипативных сил и способность к раскачиванию.