

2)Интегрирующий ацп.
Т
 еория
и решение. а) Интегрирующий АЦП измеряет
время, необходимое для того, чтобы
выходной сигнал интегратора прошел
с постоянной (опорной) скоростью через
весь диапазон значений напряжений,
пропорциональных среднему входному
сигналу.
еория
и решение. а) Интегрирующий АЦП измеряет
время, необходимое для того, чтобы
выходной сигнал интегратора прошел
с постоянной (опорной) скоростью через
весь диапазон значений напряжений,
пропорциональных среднему входному
сигналу.
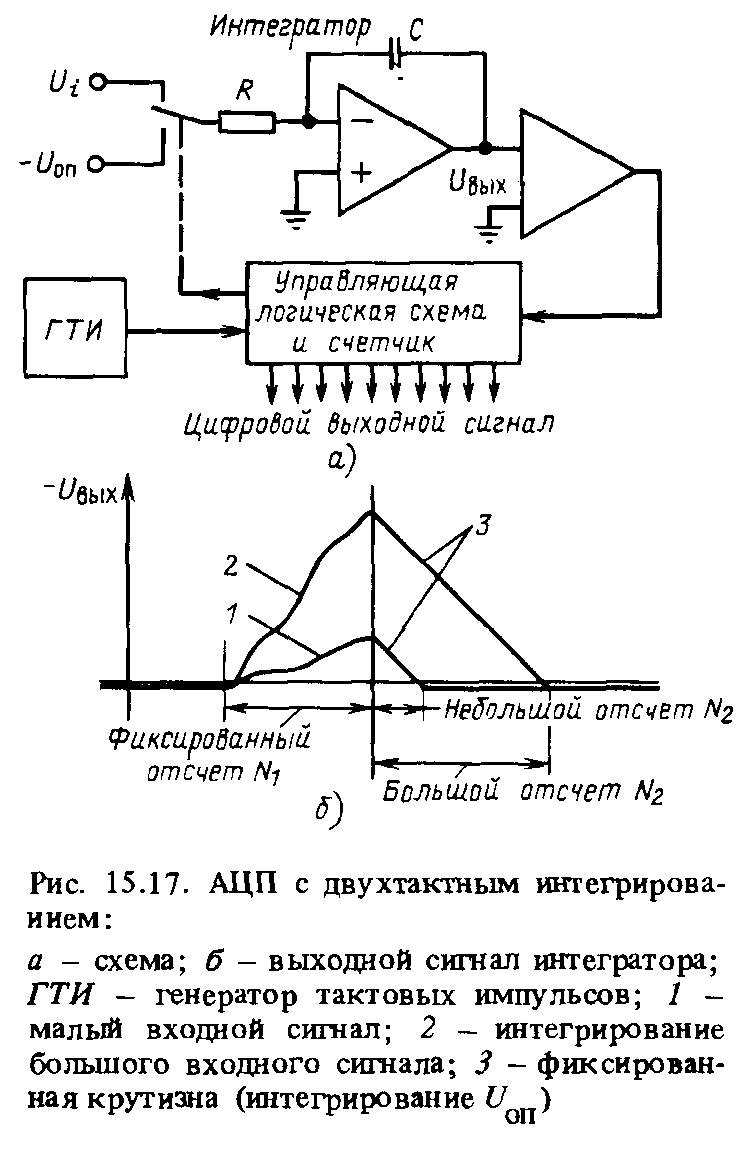
Рассмотрим схему на рис. 15.17, а. В начальный момент времени на интегратор подается входное напряжение и начинается интегрирование входного сигнала Ui . Одновременно счетчик начинает подсчет тактовых импульсов. Отсчитав за время t1 несколько тактовых импульсов N1 счетчик переключает вход интегратора.
Т
 еперь
на интегратор подается опорное напряжение
UОП, имеющее полярность, противоположную
входному сигналу. Он начинает
интегрировать в противоположном
направлении с постоянной скоростью,
а счетчик снова подсчитывает тактовые
импульсы. Когда выходной сигнал
интегратора достигает своего исходного
значения, компаратор отключается и
преобразование завершается.
Прекращается следование тактовых
импульсов, интегратор фиксируется на
исходном значении. Можно показать,
что количество отсчетов отражающее
время пропорционально среднему входному
напряжению Ui . Выходной сигнал
интегратора показан на рис. 15.17, б.
еперь
на интегратор подается опорное напряжение
UОП, имеющее полярность, противоположную
входному сигналу. Он начинает
интегрировать в противоположном
направлении с постоянной скоростью,
а счетчик снова подсчитывает тактовые
импульсы. Когда выходной сигнал
интегратора достигает своего исходного
значения, компаратор отключается и
преобразование завершается.
Прекращается следование тактовых
импульсов, интегратор фиксируется на
исходном значении. Можно показать,
что количество отсчетов отражающее
время пропорционально среднему входному
напряжению Ui . Выходной сигнал
интегратора показан на рис. 15.17, б.
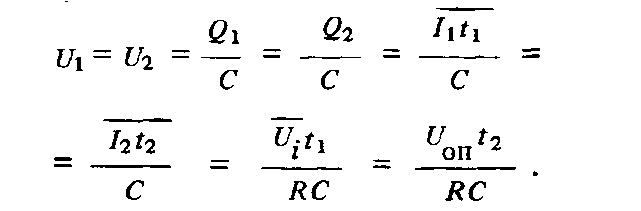
П
 оскольку
выходной сигнал интегратора после
первого такта интегрирования U1 равен
изменению выходного сигнала после
второго такта интегрирования U2 можно
записать, что
оскольку
выходной сигнал интегратора после
первого такта интегрирования U1 равен
изменению выходного сигнала после
второго такта интегрирования U2 можно
записать, что
С
 ледовательно,
ледовательно,
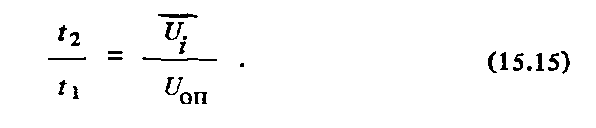
Так как время пропорционально количеству отсчетов, то
Д
 о
тех пор пока значения R, С и частоты
тактовых импульсов остаются неизменными
во время преобразования, точность
преобразования от них не зависит.
Она определяется смещением усилителя,
дрейфом напряжения смещения,
нелинейностью динамических
характеристик переключателей, интегратора
и компаратора.
о
тех пор пока значения R, С и частоты
тактовых импульсов остаются неизменными
во время преобразования, точность
преобразования от них не зависит.
Она определяется смещением усилителя,
дрейфом напряжения смещения,
нелинейностью динамических
характеристик переключателей, интегратора
и компаратора.
Выходной сигнал счетчика может бьггь двоичным или двоично-десятичным. Поскольку главным образом интегрирующие АЦП применяются в щитовых измерительных приборах с цифровой индикацией или в других устройствах отображения данных, чаще употребляется двоично-десятачная форма записи.
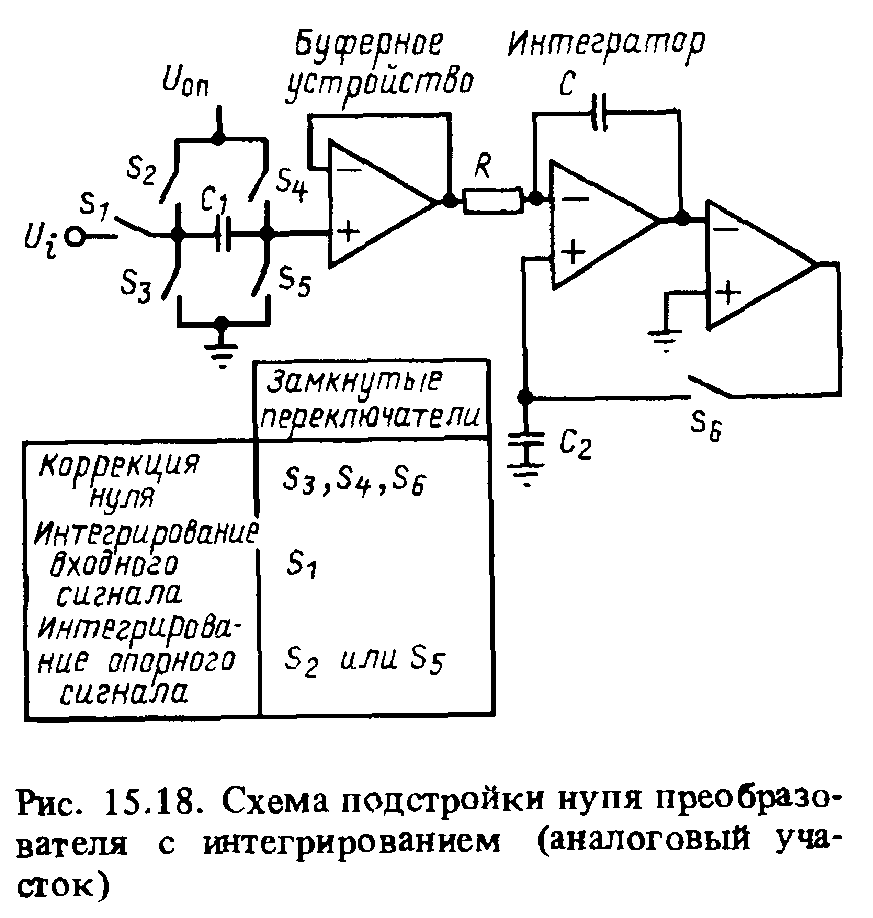
б) Интегрирующие АЦП работают гораздо медленнее, чем АЦП последовательных приближений. Однако они имеют значительно большую потенциальную точность, исключают потерю кодов, обладают помехоустойчивостью, а также вследствие использования меньшего количества высокоточных элементов гораздо дешевле. Простота, низкая стоимость и совместимость с интегральными схемами обусловливают предпочтительность их применения в щитовых измерительных приборах с цифровой индикацией.
При получении команды на начало преобразования конденсатор С1 отсоединяется от источника опорного напряжения и земли. На ранее заземленный вывод подается входной сигнал. Конденсатор С2 отсоединяется от выхода компаратора. К интегрирующему резистору прикладывается напряжение, равное входному, и далее происходит процесс интегрирования. Выходной сигнал интегратора изменяется в соответствующем направлении (в зависимости от полярности входного сигнала) относительно напряжения нулевого смещения компаратора.
После отсчета N1 тактовых импульсов на выходе интегратора появляются проинтегрированное суммарное напряжение сигнала и напряжение смещения компаратора. Вход буферного устройства переключается или на землю, или на источник опорного напряжения. Направление интегрирования определяется полярностью входного напряжения. Когда напряжение на выходе интегратора становится равным напряжению смещения компаратора, преобразование за¬канчивается.
Цифровая схема, использованная в 13- разрядном монолитном интегрирующем АЦП, является четырехтактной. Исходный двухтактный цикл преобразования со сме¬щенным опорным напряжением и заземлен¬ным входом обеспечивает цифровую меру
нуля и погрешности коэффициента передачи в форме отсчета. Затем, при подаче сигнала, осуществляется второй двухтактный цикл. Отсчет ошибки вычитается из основного от¬счета, обеспечивая отличную компенсацию погрешностей.
г) Метод интегрирования обеспечивает подавление шума, поскольку любой высоко¬частотный шум просто-напросто усредняется. К тому же происходит полное (теоретически) подавление основной и всех остальных гар¬моник частоты, период которых равен перио¬ду интегрирования сигнала. Следовательно, что бы получить достаточно е подавление на¬водки с частотой 60 Гц и ее гармоник, период интегрирования устанавливают равным 16,7 мкс или кратным этому значению.
3) Формула для расчета выходного напряжения на ОУ, работающем в режиме инвертора, имеем:
Подставим в это выражение условие, получим:
![]()
Билет №20