

2. Определение скорости и ускорения точки при координатном способе задания движения. Анализ и синтез сложного движения точки.
Скорость определяется
Учитывая орты i,j,k (имеющие неизменные модули направления, т.е постоянны и могут быть вынесены за знак производной).
V = dv/dt = i*dx/dt + j*dy/dt + k*dz/dt
Разложим на множители
V = i*Vx + j*Vy + k*Vz
Vx = dx/dt; Vy = dy/dt; Vz = dz/dt
Проекции скорости точки неподвижной оси декартовых координат равны первым производным от соответствующих координат точки по вершине.
Vx = x; Vy = y; Vz = z
Определение модуля скорости:
V= √ Vx2 * Vy2 * Vz2
Ускорение определяется:
a= d2v/dt2= i*d2x/dt2 + j*d2y/dt2 + k*d2z/dt2
разложение на составляющие
а = i*аx + j*аy + k*аz
аx = d2x/dt2; аy = d2y/dt2; аz = d2z/dt2
Проекции ускорения точки неподвижной оси декартовых координат равны вторым производным от времени, либо первым по времени от проекции скорости на соответствующие оси.
Определение модуля ускорения:
а= √ аx2 * аy2 * аz2
Анализ и синтез:
Дано: 1 схема движения, 2 характеристики простых движений.
1 Sv = B1*tn
2. n=1,2
3. Se = B2 * tm
4. φe = B3 * tm
5. m = 1,2
6. α – не существует
7. α =k * π, k = 0,1
8. . α ≠ k * π
Найти а-?
2. Дано: критерий ai; i=1,24
Найти:
1. R – прямолинейное
2. r – криволинейно
3. Sv = B1*tn
4. n-?
5. e-?
6. Se, φe = B3 * tm
7. α –?
8. Схемы движения.
Экзаменационный билет № 25
1. Разложение силы на составляющие. Проекция силы на ось и плоскость. Задача о скольжении втулки по валу.
Проекция силы на каждую координатную ось определяется применением модуля силы на cos угла между направлениями оси и силы: х=Р cos(Р,i); у=Р cos(Р, j); z=Р cos(Р,k), где углы, заключенные между направлением силы Р к направлениям осей х, у, z.
Силу можно разложить на составляющие по правилу параллелепипеда на 3 составляющие силы Рх, Ру, Рz, направленных параллельно этим осям.
С кольжение втулки по валу.
;
- граница устойчивости равновесия и граница скольжения втулки по валу.
- условие заклинивания
- условие проскальзывания.
2. Определение скорости и ускорения при векторном способе задания движения. Определение скоростей и ускорений точек тела, совершающего плоско-параллельное движение (ППД).
Определение
скорости и ускорения при векторном
способе задания движения. Скорость-
это величина характеризующая быстроту
и направление движения точки в данной
системе отсчёта. При векторном способе
задания движения положение движущейся
точки в каждый момент времени определяется
радиусом –вектором ![]() ,
который является функцией времени
,
который является функцией времени
![]() ).
При движении точки по криволинейной
траектории направление вектора скорости
непрерывно изменяется. Установив что
скорость точки является вектором,
условимся в место термина вектор
скорости употребляем термин скорость.
).
При движении точки по криволинейной
траектории направление вектора скорости
непрерывно изменяется. Установив что
скорость точки является вектором,
условимся в место термина вектор
скорости употребляем термин скорость.
Экзаменационный билет № 26
1. Аксиомы статики. Трение скольжения и качения.
Аксиома инерции. Под движением взаимно уравновешенных сил материальной точки (тела) находится в состоянии покоя или действия.
Аксиома равновесия 2 сил. 2 силы прилежащие к твердому телу, взаимно уравновешиваются только в том случае, если их модули равны, и они направлены по одной прямой в противоположные стороны.
Аксиома присоединения и исключения уравновешенных сил. Движение системы сил на твердое тело не изменяется, если к ней присоединить или из нее исключить систему взаимно уравновешенных сил.
Аксиома параллелограмма сил. Равнодействующая двух сил, приложенных к одной точке, приложена к той же точке и равна диагонали параллелограмма, построенного на этих силах как сторонах.
Аксиома равенства действия и противодействия. Всякому действию соответствует равное и противоположное по направлению противодействие.
Аксиома сохранения равновесия сил, приложенных к деформированному телу при его затвердевании. Равнодействующая сил, приложенная к деформированному телу сохраняется при его затвердевании.
Т рение скольжения и качения
Если твёрдое тело находится на абсолютно гладкой поверхности другого тела в равновесии, то реакция связи направлена по нормали к поверхности.
В действительности абсолютно гладких поверхностей не бывает. Все поверхности тел в той или иной степени шероховаты. Поэтому сила реакции шероховатой поверхности при равновесии тела зависит от активных сил не только по числовой величине, но и по направлению.
Т рением качения называется сопротивление, возникающее при качении одного тела по поверхности другого.
Активные силы, действующие на катки в виде колес, обычно состоят из силы тяжести , горизонтальной силы , приложенной к центру катка, и пары сил с моментом , стремящейся катить колесо. Колесо в этом случае называется ведомо-ведущим. Если , а , то колесо называется ведомым. Если , а , то колесо называется ведущим.
2. Плоско-параллельное движение. Мгновенный центр скоростей. Скольжение и буксование колеса. Планетарные и дифференциальные редукторы.
ППД - называется движение твердого тела при котором все его точки движутся в плоскостях параллельных какой либо одной неподвижной плоскости.
Мгновенный центр скоростей (Р)-называется такая точка данной фигуры, скорость которой в данный момент времени равна нулю (при этом q как правило не равно нулю ) когда v=0 и q=0 то тело вращается вокруг оси.
Экзаменационный билет № 27
1. Главный вектор и главный момент пространственной произвольной системы сил.
Главным вектором системы сил называется вектор, равный векторной сумме этих сил.
![]()
Главным моментом системы сил относительно точки О тела, называется вектор, равный векторной сумме моментов всех сил системы относительно этой точки.
![]()
Формулы для вычисления главного вектора и главного момента
![]()
![]()
![]()
![]()
![]()
![]()
2. Теорема об ускорениях плоской фигуры. Мгновенный центр ускорений.
Мгновенный центр ускорений: Ускорение любой точки плоскости фигуры определяется как геометрическая сумма ускорения полюса и ускорения этой точки во вращении фигуры вокруг полюса. Если мгновенный центр ускорений принять за полюс, то ускорение любой точки плоскости фигуры в данный момент времени определяется как ускорение этой точки во вращательном движении фигуры вокруг мгновенного центра ускорений. Модули ускорений точек плоской фигуры в каждый момент времени пропорциональны расстоянием от этих точек до мгновенного центра ускорений, а векторы ускорений составляют с отрезками, соединяющими эти точки с мгновенных центром ускорений один и тот же угол t = arctg B/ω2 Мгновенный центр скоростей Р и мгновенный центр ускорений Q являются различными точками плоской фигуры
Экзаменационный билет № 28
1. Трение качения. Фермы (статически определимые и статически неопределимые). Расчёт ферм. Метод вырезания углов и метод Риттера.
Т рением качения называется сопротивление, возникающее при качении одного тела по поверхности другого.
Активные силы, действующие на катки в виде колес, обычно состоят из силы тяжести , горизонтальной силы , приложенной к центру катка, и пары сил с моментом , стремящейся катить колесо. Колесо в этом случае называется ведомо-ведущим. Если , а , то колесо называется ведомым. Если , а , то колесо называется ведущим.
Ф
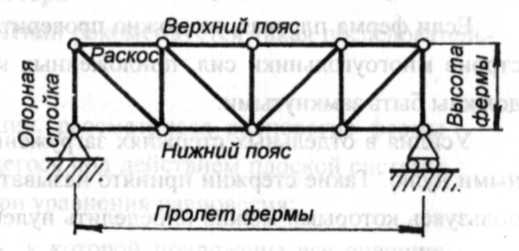 ермой
называется геометрически
неизменяемая шарнирно-стержневая
конструкция
ермой
называется геометрически
неизменяемая шарнирно-стержневая
конструкция
Стержни плоской фермы, расположенные по верхнему контуру, образуют верхний пояс, а расположенные по нижнему контуру — нижний пояс фермы.
Вертикальные стержни называются стойками, а наклонные — раскосами.
1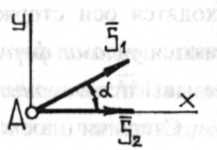 .
Если в незагруженном узле плоской
фермы сходятся два стержня, то усилия
в этих стержнях равны нулю
.
Если в незагруженном узле плоской
фермы сходятся два стержня, то усилия
в этих стержнях равны нулю
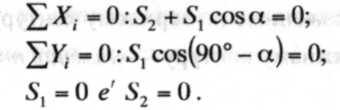
2![]()
 .
Если в незагруженном узле плоской
фермы сходятся три стержня, из которых
два расположены на одной прямой, то
усилие в третьем стержне равно нулю.
Усилия в первых двух стержнях равны
между собой.
.
Если в незагруженном узле плоской
фермы сходятся три стержня, из которых
два расположены на одной прямой, то
усилие в третьем стержне равно нулю.
Усилия в первых двух стержнях равны
между собой.
3. Если в узле плоской фермы сходятся два стержня и к узлу приложена внешняя сила, линия действия которой совпадает с осью одного из стержней, то усилие в этом стержне равно по модулю приложенной силе, а усилие в другом стержне равно нулю
![]()
2. Планетарные и дифференциальные редукторы. Степени свободы. Метод Виллиса.
Метод Виллиса:
каждому звену механизма придало вращение
с равной и противоположной угловой
скорости. При этом водила (кривошип)
остановится. ![]() – где m число внешних зацеплений между
колёсами 1 и к, i передаточное число от
колеса 1 к колесу к в относительном
движении (при остановленном водиле),
i12- передаточное число от одного вала
к другому.
– где m число внешних зацеплений между
колёсами 1 и к, i передаточное число от
колеса 1 к колесу к в относительном
движении (при остановленном водиле),
i12- передаточное число от одного вала
к другому.

![]() 1
– угол поворота первого вала
1
– угол поворота первого вала
N1 – число оборотов второго вала
ω1- угловая скорость
z2 - число зубьев второго колеса
ε – угловое ускорение
![]() -формула
Виллиса где n-число высших звеньев.
-формула
Виллиса где n-число высших звеньев.
Экзаменационный билет № 29
1. Абстракции и допущения в статике. Принцип освобождаемости от связей. Центр параллельных сил. Центр тяжести.
Принципом освобождаемости от связей – это аксиома согласно этой аксиоме, не изменяя равновесия тела, каждую связь можно отбросить, заменив ее реакцией связи.
Центр параллельных сил - некая точка С через которую обязательно проходит линия действия равнодействующей заданной системы параллельных сил если не изменяя модуль модулей силы поворачивать линии действия силы вокруг точек их приложения на один и также угол в одну и туже сторону. Система параллельных сил направленных в одну сторону, не можем уравновешиваться или приводиться к паре сил. Эта система всегда имеет равнодействующую.
Центр тяжести: Силы притяжения отдельных частиц тела к земле направленных приблизительно к центру земли. Так как размеры рассматриваемых тел малы по сравнению с радиусом земли то эти силы можно считать параллельными. Равнодействующая этих параллельных сил равна их сумме, есть вес тела, а центр этой системы, в котором приложен вес тела. В твёрдом теле центр тяжести занимает вполне определённое положение, которое не зависит от расположения рассматриваемого тела в пространстве
2. Кинематика точки. Основные понятия сферического движения. Степени свободы. Мгновенная угловая скорость и угловое ускорение.
Кинематика точки рассматривает характеристики движения точки, такие, как скорость и ускорение и методы их определения при различных способах задания движения.
Сферическое движение: движение твёрдого тела одна из точек которого всё время движения остаётся неподвижной. При таком движении все остальные точки тела движутся по сферическим поверхностям, центры которых совпадают с неподвижной точкой. Это движение тела называется сферическим движение твёрдого тела. Примером сферического движения твёрдого тела можем ощутить движение волчка имеющего неподвижную точку О.
Степени свободы — характеристики движения механической системы. Число степеней свободы определяет минимальное количество независимых переменных (обобщённых координат), необходимых для полного описания движения механической системы.
Угловой
скоростью тела в какой-либо момент
времени называется первая производная
по времени от угла поворота в этот
момент, то есть
![]() .
.
Угловым
ускорением тела называется первая
производная по времени от угловой
скорости, то есть вторая производная
от угла поворота т.е.
![]()
Экзаменационный билет № 30
1. Аксиомы статики. Трение скольжения и качения. Что начнется раньше: скольжение или буксование колеса?
Аксиома инерции.
Аксиома равновесия 2 сил.
Аксиома присоединения и исключения уравновешенных сил
Аксиома параллелограмма сил.
Аксиома равенства действия и противодействия.
А ксиома сохранения равновесия сил, приложенных к деформированному телу при его затвердевании.
Е сли твёрдое тело находится на абсолютно гладкой поверхности другого тела в равновесии, то реакция связи направлена по нормали к поверхности.
В действительности абсолютно гладких поверхностей не бывает. Все поверхности тел в той или иной степени шероховаты. Поэтому сила реакции шероховатой поверхности при равновесии тела зависит от активных сил не только по числовой величине, но и по направлению.
Трением качения называется сопротивление, возникающее при качении одного тела по поверхности другого.
Активные силы, действующие на катки в виде колес, обычно состоят из силы тяжести , горизонтальной силы , приложенной к центру катка, и пары сил с моментом , стремящейся катить колесо. Колесо в этом случае называется ведомо-ведущим. Если , а , то колесо называется ведомым. Если , а , то колесо называется ведущим.
2. Ускорение точки тела, совершающего плоско-параллельное движение (ППД). Векторный и аналитический способы решения задачи.
В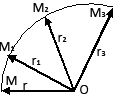 екторный
способ решения задач: Положение точки
в пространстве однозначно определяется
заданием радиуса
проведённого из некоторого неподвижного
центра О в данную точку М для определения
движения точки нужно знать, как изменяется
с течением времени радиус вектор
,
должна быть заданна векторная функция
аргументе t:
екторный
способ решения задач: Положение точки
в пространстве однозначно определяется
заданием радиуса
проведённого из некоторого неподвижного
центра О в данную точку М для определения
движения точки нужно знать, как изменяется
с течением времени радиус вектор
,
должна быть заданна векторная функция
аргументе t: ![]() траектория точки является геометрическим
методом концов радиуса – вектора
движущейся точки. Линия образованная
концами переменного вектора, начало
которого находится в определённой
точке пространства называется годографом
этого вектора. Следовательно траектория
точки М является годографом её радиуса
вектора
траектория точки является геометрическим
методом концов радиуса – вектора
движущейся точки. Линия образованная
концами переменного вектора, начало
которого находится в определённой
точке пространства называется годографом
этого вектора. Следовательно траектория
точки М является годографом её радиуса
вектора
С корость точки М получим, определив проекции ее на оси координат Ох и Оу.
Для этого возьмем первые производные по времени от уравнений
; ;
Или
Величину полной скорости определим по формуле
.
Найдем также проекции ускорения точки М на оси координат Ох и Оу. Взяв производные по времени от проекции скоростей Vx и Vy:
получим:
; ;
Величину полного ускорения определим по формуле
.