

Экзаменационный билет № 1
Метод Пуансо о параллельном переносе силы. Приведение сил к заданному центру. Сложение сил, произвольно расположенных в пространстве.
Силу «Р» не изменяя ее действия на твердое тело можно перенести из точки ее приложения «А», в любой центр приведения «О», приложив при этом к телу пару сил с моментом «М», геометрически равным моменту «М0» этой силы, относительно центра приведения – это метод Пуансо, он так же называется приведением силы к заданному центру.
P ’’=P
’’=P
Система 3-х сил:P, P’, P”.
Для сложения произвольно расположенных сил необходимо воспользоваться методом проекции.
Известно что R*=Р1+Р2+Р3+…+Рn обозначая х и у проекции главного вектора на оси координат, получим
Где проекции сил соответственно на оси
Определение скорости и ускорения точки при координатном способе задания движения. Анализ и синтез сложного движения точки.
Скорость определяется
Учитывая орты i,j,k (имеющие неизменные модули направления, т.е постоянны и могут быть вынесены за знак производной).
V = dv/dt = i*dx/dt + j*dy/dt + k*dz/dt
Разложим на множители
V = i*Vx + j*Vy + k*Vz
Vx = dx/dt; Vy = dy/dt; Vz = dz/dt
Проекции скорости точки неподвижной оси декартовых координат равны первым производным от соответствующих координат точки по вершине.
Vx = x; Vy = y; Vz = z
Определение модуля скорости:
V= √ Vx2 * Vy2 * Vz2
Ускорение определяется:
a= d2v/dt2= i*d2x/dt2 + j*d2y/dt2 + k*d2z/dt2
разложение на составляющие
а = i*аx + j*аy + k*аz
аx = d2x/dt2; аy = d2y/dt2; аz = d2z/dt2
Проекции ускорения точки неподвижной оси декартовых координат равны вторым производным от времени, либо первым по времени от проекции скорости на соответствующие оси.
Определение модуля ускорения:
а= √ аx2 * аy2 * аz2
Анализ и синтез:
Дано: 1 схема движения, 2 характеристики простых движений.
1 Sv = B1*tn
2. n=1,2
3. Se = B2 * tm
4. φe = B3 * tm
5. m = 1,2
6. α – не существует
7. α =k * π, k = 0,1
8. . α ≠ k * π
Найти а-?
2. Дано: критерий ai; i=1,24
Найти:
1. R – прямолинейное
2. r – криволинейно
3. Sv = B1*tn
4. n-?
5. e-?
6. Se, φe = B3 * tm
7. α –?
8. схемы движения.
Экзаменационный билет № 2
Две задачи статики. Равновесие плоской системы параллельных сил.
Две задачи статики:
Определение условий равновесия всех систем сил.
Приведение систем сил к эквивалентному (и к более простым)
R* = 0, R = R*, R* = Fi (i=1,n)
R* - главный вектор системы сил.
М0 – главный момент системы сил (М0 = Mi, (i=1,n)).
Скорость и ускорение точки тела, вращающегося вокруг неподвижной оси. Формирование схемы сложного движения точки по критериям Абсолютного ускорения
 ,
i=
,
i=
V; = φ0 =dφ/dt;
A; ε = 0= φ0.
Экзаменационный билет № 3
1. Центр тяжести плоской фигуры. Прямая (анализ) и обратная (синтез) задачи статики.
Положение центра тяжести плоской фигуры определяется 2 координатами: хс и ус.
Все плоские фигуры выразим:
G=F, где F – площадь плоской фигуры, - все единицы ее площади.
Разобьем площадь фигуры на элементарные площади:
Gi=Fi, где Fi – площадь хi, уi обозначенные как координаты центра тяжести элементарной площади Mi. Определим координаты центра тяжести фигуры, определяем по формуле:
Xc = (xi*Gi)/G = (xi*Fi)/F = (åxi*DFi)/F
Xc = (åxi*DFi)/F;
Уc = (åyi*DFi)/F
Центр тяжести плоской фигуры называется центром тяжести площади этой плоскости.
Анализ и синтез статики.
Анализ. Дано: схема, количество опор, нагрузки. Найти: реакции опор, однородность реакций.
Синтез: критерий выбора системы осей. Найти схемы и характер простых движений.
2. Выражение скорости точки вращающегося тела и ее касательного и нормального ускорений. Основные понятия плоско-параллельного движения (ППД) тела.
ППД – движение твердого тела, при котором все его точки движутся в пространстве параллельном какой-нибудь плоскости.
v* = v*01+v*1
O1 – полюс (неподвижная точка на теле).
Экзаменационный билет № 4
1. Принцип освобождаемости от связей. Случай приведения произвольной пространственной системы сил к динаме или к динамическому винту.
Принцип освобождаемости от связей … состояние тела неизменно, если действие связи к нему приложенными, заменимо силами, называемыми силами реакции связи.
Приведение к динаме или к динамическому винту.
2. Естественный способ задания движения точки. Естественные оси и их орты. Ускорение точки тела, совершающего плоско-параллельное движение (ППД).
Естественный способ задания движения точки:
траектория (заранее известно)
знать начальную точку
направление определено
значение дуговой координаты S=S(t)
Ускорение точки тела, совершающего ППД
![]()
![]()
![]()
Экзаменационный билет № 5
1. Геометрический и аналитический способы сложения сил. Сходящиеся силы. Равнодействующая сходящихся сил. Условие равновесия системы сходящихся сил в геометрической и аналитической формах.
Сходящиеся силы, уравновешивающиеся в том случае, если их равнодействующая =0 (т.е. многоугольник сил замкнут)
Р1+Р2+…+Рп=0
Рi=0
Сходящимися называются силы, линии действия которых пересекаются в 1 точке.
2. Векторный способ задания движения точки. Определение скорости и ускорения. Формулы Эйлера (Vx, Vy, Vz). Скольжение и буксование колеса.
Движение
точки относительно рассматриваемой
системы отсчета задано, если известен
радиус-вектор
![]() этой точки как
функция времени,
т.е.
этой точки как
функция времени,
т.е.
![]()
.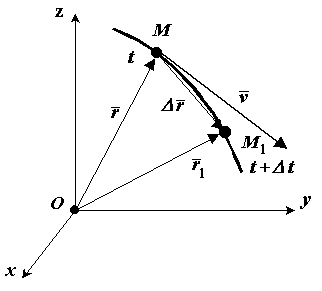 Скорость – векторная величина,
характеризующая быстроту и направление
движения точки в данной системе отсчета.
Скорость – векторная величина,
характеризующая быстроту и направление
движения точки в данной системе отсчета.
![]()
Ускорение точки характеризует быстроту изменения модуля и направления скорости точки.
Формулу Эйлера.
![]()
Скольжение и буксование колеса
ППД=ВД+ПД
ППД – плоско-параллельное движение
ПД – поступательное движение
ВД – вращательное движение.
Скольжение
ППД=ВД←ПД
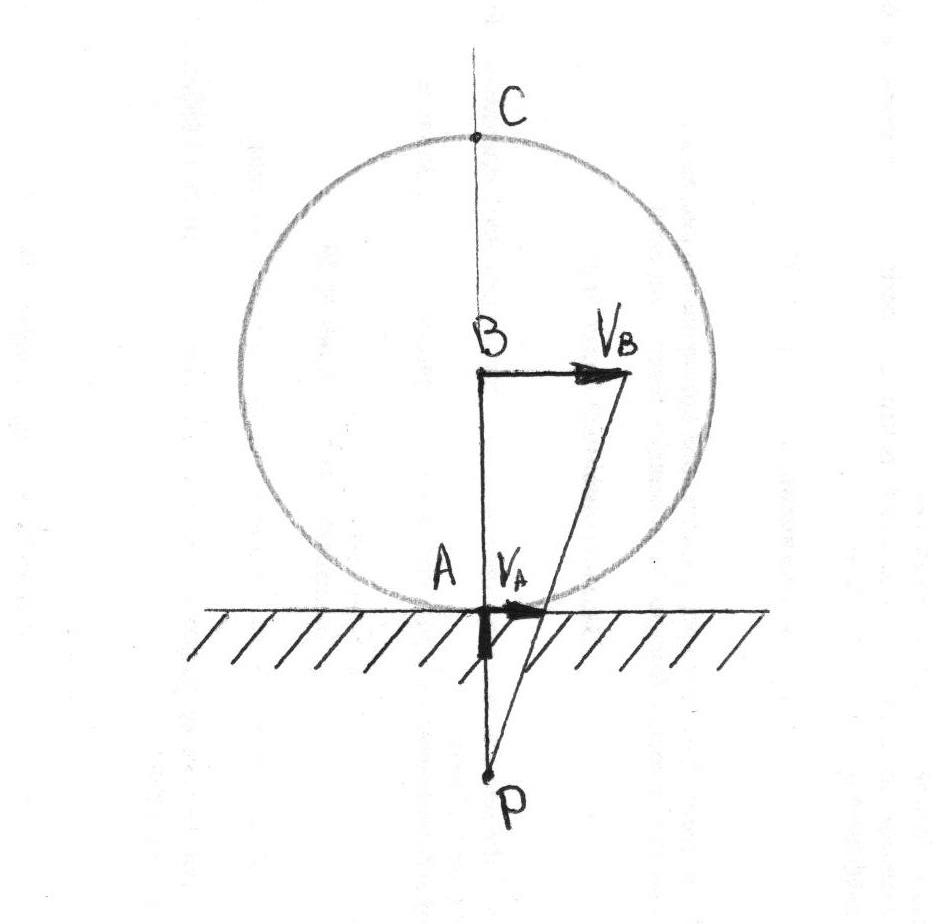
Р – скорость скольжения
При скольжении мгновенный центр оси положения изменится от 1(Р) до .
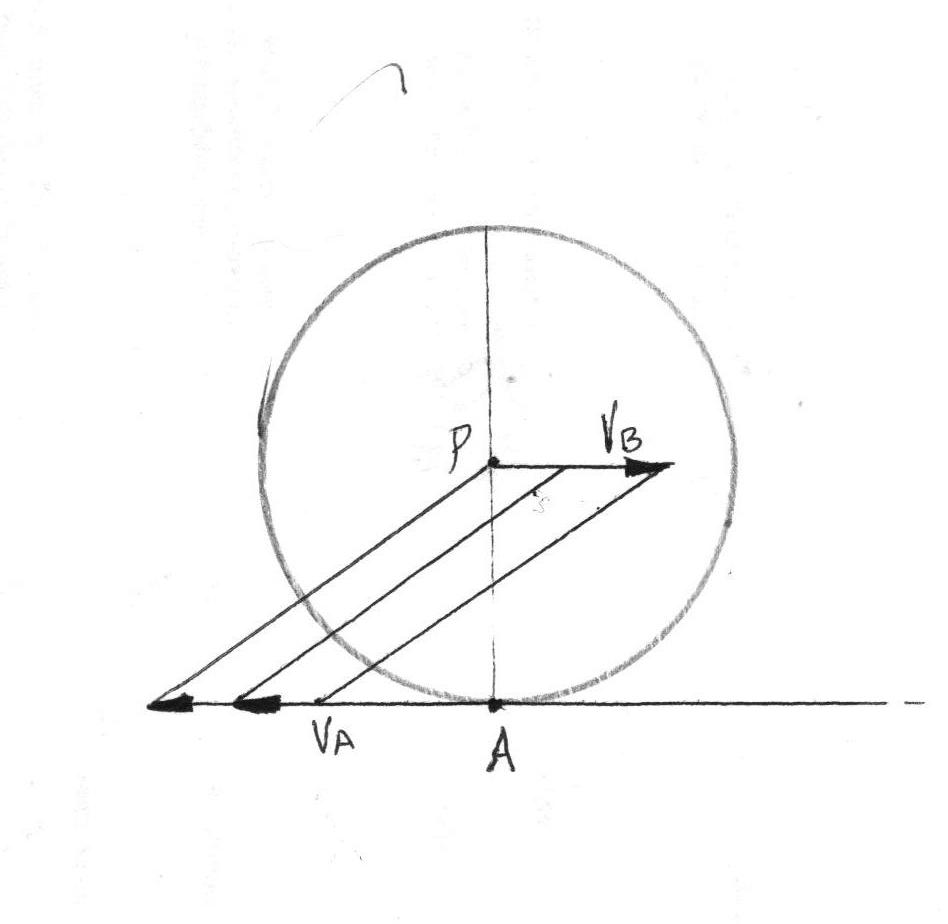
Буксование
ППД=ВД→ПД
Когда вращательные свойства превалируют над поступательными.
Экзаменационный билет № 6
1. Пара сил. Момент пары сил. Условия равновесия пар сил, расположенных в плоскости и в пространстве.
Пара сил – система 2 равных и противоположно направленных сил, не лежащих на 1 прямой.
А В
=d – плечо пары сил.
В
=d – плечо пары сил.
|M(F1;F2)|=|±F1*d|=|±F2*d|
Величина момента пары сил.
Условно вектор момента пары сил (М) находится по середине отрезка АВ и перпендикулярно к плоскости действия этой пары сил.
М=М1+М2+…+Мп
М=Мi=0 – следовательно пары сил взаимно уравновешиваются.
Билет 6.2.
2. Поступательное движение твердого тела. Теоремы о траекториях, скоростях и ускорениях точек твердого тела при поступательном движении. Анализ и синтез сложного движения точки.
ПД – движение, при котором прямая проведенная в теле остается параллельна себе.
Скорости всех точек равны и параллельны.vA=vB=vi
Ускорения всех точек равны и параллельны.aA=aB=ai=a
Анализ и синтез:
Дано: 1 схема движения, 2 характеристики простых движений.
1 Sv = B1*tn
2. n=1,2
3. Se = B2 * tm
4. φe = B3 * tm
5. m = 1,2
6. α – не существует
7. α =k * π, k = 0,1
8. . α ≠ k * π
Найти а-?
2. Дано: критерий ai; i=1,24
Найти: 1. R – прямолинейное
2. r – криволинейно
3. Sv = B1*tn
4. n-?
5. e-?
6. Se, φe = B3 * tm
7. α –?
8. Схемы движения.
Экзаменационный билет № 7
1. Геометрическое сложение сил (различные методы). Геометрическое условие равновесия системы сходящихся сил. Почему провода на высоковольтных линиях электропередач делают провисающими?
2. Теорема о сложении скоростей точки в сложном движении. Синтез сложного движения точки (обратная задача).
Теорема. Скорость абсолютного движения точки равна векторной сумме переносной и относительной скоростей.
Движение точки относительно основной неподвижной системы отсчета O1x1y1z1 называется абсолютным. Движение точки относительно подвижной системы отсчета Oxyz называется относительным. Переносным движением точки называется движение, которое она совершает вместе с подвижной системой отсчета, как точка, жестко скрепленная с этой системой в рассматриваемый момент времени.
Анализ и синтез:
Дано: 1 схема движения, 2 характеристики простых движений.
1 Sv = B1*tn
2. n=1,2
3. Se = B2 * tm
4. φe = B3 * tm
5. m = 1,2
6. α – не существует
7. α =k * π, k = 0,1
8. . α ≠ k * π
Найти а-?
2. Дано: критерий ai; i=1,24
Найти:
1. R – прямолинейное
2. r – криволинейно
3. Sv = B1*tn
4. n-?
5. e-?
6. Se, φe = B3 * tm
7. α –?
8. Схемы движения.
Экзаменационный билет № 8
1. Связь. Реакция связи. Основные виды связей и их реакции. Разложение сил на составляющие (различные случаи).
Тело, ограниченное свободным движением данного твердого тела, является по отношению к нему связью.
Реакция связи – сила или система сил, выражающая механическое действие связи на тело.
Основные виды связей:
Шарнирно-неподвижная опора

Шарнирно-подвижная опора

Невесомый стержень


Жесткая заделка

Качение

с учетом трения качения без учета трения качения
2. Абсолютное, относительное, переносное движения. Определение скорости точки при сложном движении. О критериях абсолютного движения точки, совершающей сложное движение, в прямой и обратной задачах (анализ и синтез).
Абсолютное движение точки – движение точки Н относительно неподвижной системы отсчета.
Относительное движение точки – движение точки Н относительно подвижной системы отсчета.
Переносное движение – движение подвижной системы отсчета Оxyz и неизменно связанного с ней тела А по отношению к подвижной системе отсчета.
Определение скорости точки при сложном движении
V= √ Vx2 * Vy2 * Vz2
Экзаменационный билет № 9
1. Центр тяжести твердого тела. Главный вектор и главный момент системы сил.
Центр тяжести главного вектора называется неизменно связанная с этим телом точка, через которую проходит линия действия равнодействующей сил тяжести, действующие на частицы данного тела, при любом положении тела в пространстве.
Главным вектором системы сил называется вектор, полученный в результате формирования геометрического сложения сил, образования систем.
2. Модуль и направление ускорения Кориолиса. Проектирование схемы сложного движения точки с заранее заданными кинематическими свойствами (обратная задача или синтез сложного движения точки).
Модуль ускорения Кориолиса равен удвоенному произведению угловой скорости переносного вращения на модуль проекции относительной скорости на плоскость, перпендикулярную оси переносного вращения; чтобы получить направление ускорения Кориолиса, необходимо вектор проекции относительной скорости повернуть на вокруг оси, параллельной оси переносного вращения в направлении этого вращения.
ускорением Кориолиса (иногда его называют добавочным или поворотным ускорением) и обозначается .
Экзаменационный билет № 10
1. Основные понятия статики. Статически
определимые и неопределимые системы
сил. Линейно независимые уравнения
равновесия. Понятие о
![]() ,
i=
,
i=
![]()
Статика – раздел механики, изучающий 2 основные задачи:
Замена первой системы на ей эквивалентную систему
Изучение условий равновесия
- аналитическая
- геометрическая система
Абсолютно твердое тело – такое тело, расстояние между 2 точками которого остается неизменным.
Сила – степень или мера механического воздействия между телами.
Типы систем сил:
Плоская система |
Пространственная система |
Сходящихся сил |
|
Параллельных сил |
|
Произвольных сил |
|
СТ – степень статической определимости неопределенности.
СТ =Н-Уi,
где Н – неизвестное количество составных реакций опор и шарниров,
i – число сил, входящих в состав конструкции,
Уi – число линейно независимых уравнений равновесия, присущих виду систем сил, приложенных к нему.
СТ = 0 – система статически определима, устойчива и работоспособна
СТ > 0 – система статически не определима, но устойчива и работоспособна
СТ < 0 – система статически не определима, не устойчива и не работоспособна
2. Выражение скорости точки вращающегося тела и ее касательного и нормального ускорений. Основные понятия плоско-параллельного движения (ППД) тела.
ППД – движение твердого тела, при котором все его точки движутся в пространстве параллельном какой-нибудь плоскости.
v* = v*01+v*1
O1 – полюс (неподвижная точка на теле).
Экзаменационный билет № 11
1. Аналитическое сложение сил. Аналитическое условие равновесие системы сходящихся сил. Задача о скольжении втулки по валу.
Равнодействующая сходящихся сил Р1, Р2, Рп = геометрической этих сил.
R=P1+P2+…+Pn. Проекция равнодействующей на каждую из координат осей = алгебраической проекций всех соответствующих:
X=X1+X2+…+Xn
Y=Y1+Y2+…+Yn
Z=Z1+Z2+…+Zn
Этим формулам можно придать вид:
X=Xi, Y=Yi, Z=Zi, где i=1,2,…,п.
В случае, если силы возможно уравняются, их равнодействующая R=0, т.к. R= √ x2 + y2 + z2=0, то х=0,у=0, Z=0. Таким образом, получаем 3 уравнения равновесия
X1+X2+…+Xn=0 или Xi=0
Y1+Y2+…+Yn=0 или Yi=0
Z1+Z2+…+Zn=0 или Zi=0
При помощи этих значений можно рассчитать закономерности на равновесия сходящихся сил, такой метод называется аналитическим.
2. Векторный способ задания движения точки (траектория, перемещение, годограф). Анализ и синтез кинематики сложного движения точки (прямая и обратная задачи).
Существуют 3 способа задания движения точки Xi: векторный, координат, естественный.
Траектория – геометрическое место последовательного положения движения точки.

Годограф радиуса вектора R совпадает с траекторией движения. Траектория точки является геометрическим местом концов радиуса вектора r движущей точки. Линия, обращенная направлением переменного вектора, начало которого находится в определенной точке пространства называется годографом.
Экзаменационный билет № 12
1. Аксиомы статики. Задача о скольжении втулки по валу.
Аксиома инерции. Под движением взаимно уравновешенных сил материальной точки (тела) находится в состоянии покоя или действия.
Аксиома равновесия 2 сил. 2 силы прилежащие к твердому телу, взаимно уравновешиваются только в том случае, если их модули равны, и они направлены по одной прямой в противоположные стороны.
Аксиома присоединения и исключения уравновешенных сил. Движение системы сил на твердое тело не изменяется, если к ней присоединить или из нее исключить систему взаимно уравновешенных сил.
Аксиома параллелограмма сил. Равнодействующая двух сил, приложенных к одной точке, приложена к той же точке и равна диагонали параллелограмма, построенного на этих силах как сторонах.
Аксиома равенства действия и противодействия. Всякому действию соответствует равное и противоположное по направлению противодействие.
Аксиома сохранения равновесия сил, приложенных к деформированному телу при его затвердевании. Равнодействующая сил, приложенная к деформированному телу сохраняется при его затвердевании.
С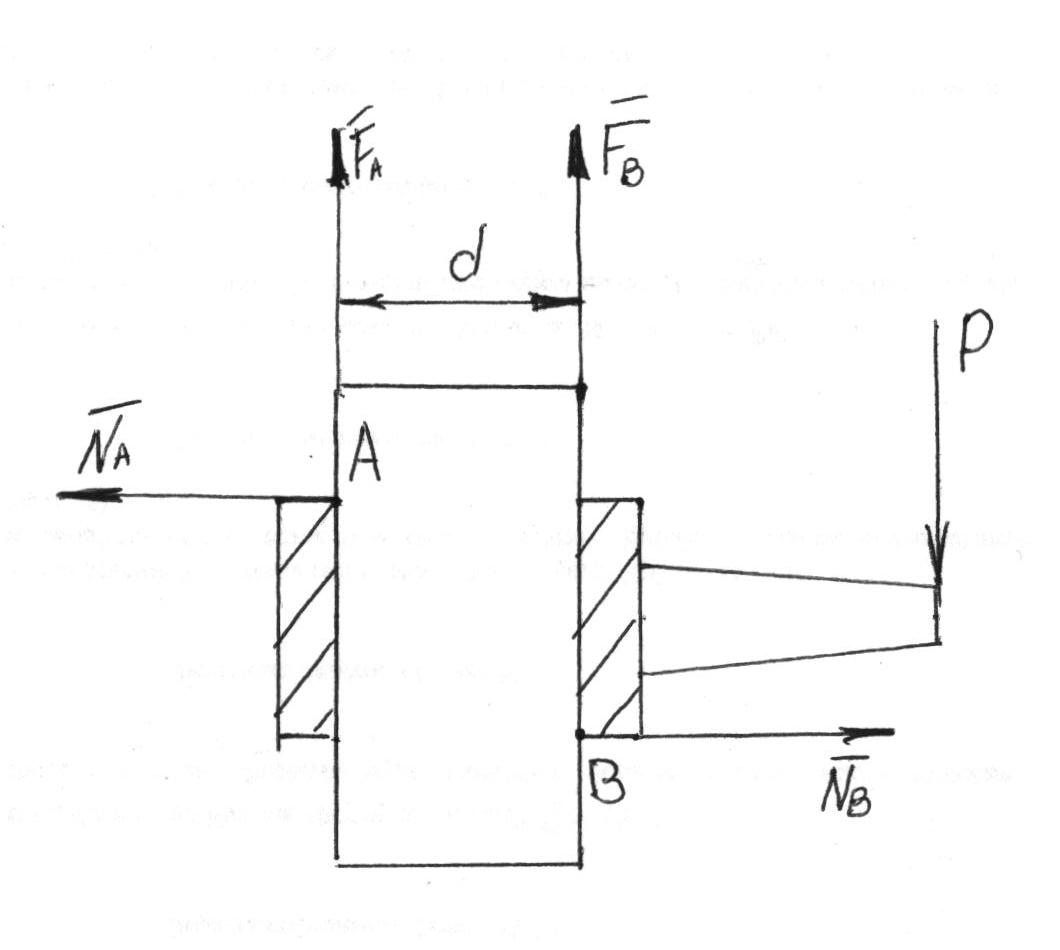 кольжение
втулки по валу.
кольжение
втулки по валу.
![]()
 ;
;
![]() - граница устойчивости равновесия и
граница скольжения втулки по валу.
- граница устойчивости равновесия и
граница скольжения втулки по валу.
![]() - условие заклинивания
- условие заклинивания
![]() - условие проскальзывания.
- условие проскальзывания.
2. Связь между абсолютной и локальной производной переменного вектора, заданного в подвижной системе координат (формула Бура). Мгновенный центр скоростей.
Абсолютная производная переменного вектора r1 (X1,у1, Z1) и с ортами i, j, k заданная в подвижной системе координат X1,у1, Z1, вычисленная в неподвижной системе отсчета с осями х, у, Z и с ортами i, j, k равно геометрической локальной производной.
![]()
![]()
![]()
Экзаменационный билет № 13
1. Разложение силы на составляющие. Проекция силы на ось и плоскость. Задача о скольжении втулки по валу.
Проекция силы на каждую координатную ось определяется применением модуля силы на cos угла между направлениями оси и силы: х=Р cos(Р,i); у=Р cos(Р, j); z=Р cos(Р,k), где углы, заключенные между направлением силы Р к направлениям осей х, у, z.
Силу можно разложить на составляющие по правилу параллелепипеда на 3 составляющие силы Рх, Ру, Рz, направленных параллельно этим осям.
С кольжение втулки по валу.
;
- граница устойчивости равновесия и граница скольжения втулки по валу.
- условие заклинивания
- условие проскальзывания.
2. Модуль и направление ускорения Кориолиса. Проектирование схемы сложного движения точки с заранее заданными кинематическими свойствами (обратная задача или синтез сложного движения точки).
Кориолисовым
или поворотным ускорением называются
составляющие абсолютного ускорения
точки в сложном движении, = удвоенному
вектору произведения угловой скорости
переносного вращения на относительные
скорости точки:
![]()
Кориолисово ускорение =0 в 3 случаях:
Если wе=0, т.е. в случае поступательного переносного движения или в моменты образования в нуль угловой скорости непоступательного переносного движения.
Если vr=0, т.е. в случае относительного покоя точки или в моменты равенства нулю относительной скорости движения точки.
Если угол между векторами wе и vr равен нулю или π.
Чтобы найти направление кориолисова ускорения следует спроектировать относительную скорость точки на плоскость перпендикулярно к оси переносного вращения, и повторить эту проекцию в той же плоскости на 90 градусов в сторону переносного направления.
Экзаменационный билет № 14
1. Частные случаи приведения произвольной системы сил к простейшему виду.
I. R*=0; М=М0=0, если главный вектор системы сил =0, то ее главный момент относительно центра приведения тоже =0, то силы взаимно уравниваются
II. R*=0; М=М0≠0, тогда если главный вектор сил =0, а ее главный момент относительно центра приведения не =0, то силы приведены к паре сил. Момент этой пары сил = главному моменту системы сил относительно центра приведения. В этом случае главные моменты данной системы сил относительно всех точек плоскости = по величине и совпадают по значению.
III. R*≠0; М=М0=0, если главный вектор системы сил не =0, а главный момент ее относительно центра приведения =0, то силы приведены к равнодействующей: R=R*, линии действия которой проходят через центр приведения.
IV. R*≠0; М=М0≠0, если главный вектор системы сил не =0, ее главный момент относительно центра приведения не =0.
2. Векторы угловой скорости и углового ускорения. Относительное движение точки, совершающей сложное движение. Скольжение и буксование колеса.
Движение точки относительно подвижной системы отсчета называется относительное движение точки. Скорость и ускорение точки в относительном движении называют относительной скоростью и относительным ускорением точки и обозначают vr и аr.
При скольжении мгновенный центр изменится от положения 1 до бесконечности. Буксование – происходит, когда вращательные свойства превалируют над поступательными.
Экзаменационный билет № 15
1. Момент силы относительно центра,
как вектор. Аналитическое выражение
момента силы. Вывод формулы Эйлера (![]() ).
).
Мх=уZ- zУ; Му= zХ-хZ, Мz=хУ-уХ – аналитические выражения моментов сил относительно координат осей. Точку, относительно которой берется момент называют центром момента, а момент силы, относительно этой точки – моментом относительно центра.
Вывод формулы Эйлера:
V= ds/ dt=h* dφ/dt=hw
|v|=|w|*h=|w|*r* sinα или |v|=|w*r|, то модуль векторного произведения w*r = модулю скорости точки направления векторов w*r и v тоже совпадает. Следовательно v=w*r, то вектор скорости любой точки вращающегося тела = векторному произведению угловой скорости тела на радиус вектор этой точки.
2. Определение скорости и ускорения при векторном способе задания движения. Определение ускорения точки тела, совершающего плоско-параллельное движение (ППД).
Скорость точки равна первой производной по времени от ее радиус-вектора.
![]()
Ускорением
точки
![]() в момент времени
в момент времени
![]() называется предел к которому стремится
среднее ускорение при
называется предел к которому стремится
среднее ускорение при
![]() ,
стремящемся к нулю. Ускорение точки
равно первой производной по времени
от скорости точки или второй производной
по времени от радиус-вектора.
,
стремящемся к нулю. Ускорение точки
равно первой производной по времени
от скорости точки или второй производной
по времени от радиус-вектора.
Плоскопараллельным называется такое движение твердого тела, при котором все его точки перемещаются параллельно некоторой фиксированной плоскости.
С корость
точки М получим, определив проекции
ее на оси координат Ох и Оу.
корость
точки М получим, определив проекции
ее на оси координат Ох и Оу.
Для этого возьмем первые производные по времени от уравнений
![]() ;
;
И получим:
![]() ;
;
Или
![]() ;
;
Величину полной скорости определим по формуле
![]() .
.
Найдем также проекции ускорения точки М на оси координат Ох и Оу. Взяв производные по времени от проекции скоростей Vx и Vy:
получим:
![]() ;
;
Или
 ;
;
Величину полного ускорения определим по формуле
![]() .
.
Экзаменационный билет № 16
1. Условия равновесия произвольной плоской системы сил (геометрические и аналитические).
На тело действует плоская система сил. Расположим оси Ox и Oy в плоскости действия сил.
Уравнения ![]()
![]()
![]()
Для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных осей координат, расположенных в плоскости действия сил, были равны нулю и сумма моментов этих сил относительно любой точки, находящейся в плоскости действия сил также была равна нулю.
![]()
![]()
![]()
2. Скорость и ускорение точки твердого тела, вращающегося вокруг неподвижной оси. Метод Виллиса.
![]() =f(t)-уравнение
выражает закон вращательного движения
твёрдого тела вокруг неподвижной оси.
Основными кинематическими характеристиками
вращательного движения твёрдого тела
является его угловая скорость ω и
угловое ускорение ε
=f(t)-уравнение
выражает закон вращательного движения
твёрдого тела вокруг неподвижной оси.
Основными кинематическими характеристиками
вращательного движения твёрдого тела
является его угловая скорость ω и
угловое ускорение ε
![]() – или ω=
– или ω=
Таким образом числовое значение углов скорости тела в данный момент времени = первой производной от угла поворота по времени. Равенство показывает, что величина ω равна отношению элементов угла поворота d к соответствующему промежутку времени dt Знак ω определяет направление вращения тела. Когда вращение происходит против хода часовой стрелки ω>0 а когда по ходу – ω<0
При росте планетарных и дифференциальных передач можно сообщив мысленно всей неподвижной плоскости вращение с угловой скоростью ωab разной по модулю и противоположной по направлению угловой скорости кривошипа AB ( методом Виллиса)
Тогда кривошип будет неподвижен, а любая шестерня радиуса rk, будет иметь угловую скорость
ωk = ωk - ωAB,
где ωk - абсолютная угловая скорость
Экзаменационный билет № 17
1. Условия равновесия системы параллельных сил. Понятие о , i= . Условия равновесия системы сил, произвольно расположенной в пространстве.
Пространственная система сил параллельны Оx
Ox
Y
X
|
1) ∑FAX = 0 2) ∑My (Fk) = 0 3) ∑Mz (Fk) = 0 |
Oz
y
x |
Пр-но: условия равновесия.
|
 Z
Z Z
ZСТ – степень статической определимости неопределенности.
СТ =Н-åУi,
где Н – неизвестное количество составных реакций опор и шарниров,
i – число сил, входящих в состав конструкции,
Уi – число линейно независимых уравнений равновесия, присущих виду систем сил, приложенных к нему.
СТ = 0 – система статически определима, устойчива и работоспособна
СТ > 0 – система статически не определима, но устойчива и работоспособна
СТ < 0 – система статически не определима, не устойчива и не работоспособна
2. Формулы Пуассона при вращении твердого тела вокруг оси произвольного направления. Ускорение точек тела, совершающего плоско-параллельное движение.
С корость точки М получим, определив проекции ее на оси координат Ох и Оу.
Для этого возьмем первые производные по времени от уравнений
;
И получим:
;
Или
;
Величину полной скорости определим по формуле
.
Найдем также проекции ускорения точки М на оси координат Ох и Оу. Взяв производные по времени от проекции скоростей Vx и Vy:
получим:
;
Или
;
Величину полного ускорения определим по формуле
.
Экзаменационный билет № 18
1. Условие равновесия твердого тела с одной и двумя закрепленными переменными. Понятие о , i= .
СТ – степень статической определимости неопределенности.
СТ =Н-åУi,
где Н – неизвестное количество составных реакций опор и шарниров,
i – число сил, входящих в состав конструкции,
Уi – число линейно независимых уравнений равновесия, присущих виду систем сил, приложенных к нему.
СТ = 0 – система статически определима, устойчива и работоспособна
СТ > 0 – система статически не определима, но устойчива и работоспособна
СТ < 0 – система статически не определима, не устойчива и не работоспособна
2. Векторы угловой скорости и углового ускорения. Переносное движение точки тела (сложное движение точки).
Отношение
приращение вектора угловой скорости
![]() к времени △t
определяет вектор среднего углового
ускорения
к времени △t
определяет вектор среднего углового
ускорения![]() направление
вектора
направление
вектора ![]() совпадает с направлением
Приращение этого отношения при
совпадает с направлением
Приращение этого отношения при ![]()
Называется
уравнением тела в момент t: ![]()
Вектор углового
ускорения равен производной от вектора
скорости по времени. Угловое ускорение
тела геометрически равен линии скорости
конца вектора угловой скорости. Для
определения модуля угловой скорости
тела ω следует модуль скорости точки
VA разделить на решение от точки А до
мгновенной оси вращения. Движение
подвижной системы отсчёта Oxyz и неизменно
связанного с ней тела А по отношению к
неподвижной системе отсчёта является
для точки М переносным движением. Точки
тела А совершая различные движением
имеют в данный момент различные скорости
и ускорения точки тела А связанного с
подвижной системой отсчёта совпадающей
в данный момент с движущей точкой
называют переносной скоростью и
переносным ускорением точки М и
обозначаются ![]() и
и ![]()
Экзаменационный билет № 19
1. Трение скольжения. Законы Амонтона-Кулона. Формула Эйлера ( ).
Е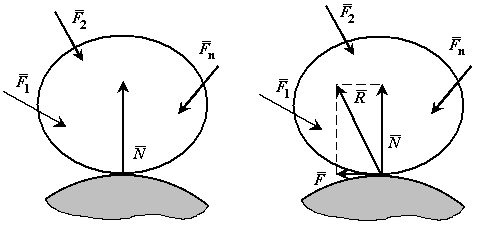 сли
твёрдое тело находится на абсолютно
гладкой поверхности другого тела в
равновесии, то реакция связи направлена
по нормали к поверхности.
сли
твёрдое тело находится на абсолютно
гладкой поверхности другого тела в
равновесии, то реакция связи направлена
по нормали к поверхности.
В действительности абсолютно гладких
поверхностей не бывает. Все поверхности
тел в той или иной степени шероховаты.
Поэтому сила реакции
![]() шероховатой поверхности при равновесии
тела зависит от активных сил не только
по числовой величине, но и по направлению.
шероховатой поверхности при равновесии
тела зависит от активных сил не только
по числовой величине, но и по направлению.
![]()
Разложим силу реакции
шероховатой поверхности на составляющие:
одну из которых
![]() направим по общей нормали к поверхности
соприкосновения, а другую
направим по общей нормали к поверхности
соприкосновения, а другую
![]() направим в касательной плоскости к
этим поверхностям.
направим в касательной плоскости к
этим поверхностям.