

2.Динамические характеристики элементов и систем
2.1 Дифференциальные уравнения
Поведение элементов и систем во время перехода из одного состояния равновесия в другое (в переходном режиме) описывается дифференциальными уравнениями (уравнениями динамики). У линейных систем уравнения динамики – линейные дифференциальные уравнения, т.е. такие уравнения, в которых входная и выходная величины и их производные - в первой степени.
В теории автоматического регулирования принято выходную величину и её производные располагать в левой части уравнения, а входную величину и ее производные в правой части.
Для элемента (системы с одной входной и одной выходной величинами) линейное дифференциальное уравнение с постоянными коэффициентами имеет вид:

![]()
![]() [2.1]
В сокращенной форме записи, тогда k-тая
производная по времени обозначается
x(k),
вторая и первая производные -
[2.1]
В сокращенной форме записи, тогда k-тая
производная по времени обозначается
x(k),
вторая и первая производные -
![]() и
и
![]() и для простоты допускается указание
функциональной зависимости входной и
выходной величин от времени (τ), тогда
уравнение приобретает вид:
и для простоты допускается указание
функциональной зависимости входной и
выходной величин от времени (τ), тогда
уравнение приобретает вид:
 ,
[2.2]
,
[2.2]
где αn÷αn-1 и bm÷bm-1 – постоянные коэффициенты;
n – порядок дифференциального уравнения (обычно m<n).
Величины хВХ и хВЫХ могут быть выражены:
в абсолютных величинах хВХ и хВЫХ;
в отклонениях Δхвх=хвх -
 и Δхвых=
хвых
-
и Δхвых=
хвых
-
(в линеаризованных уравнениях);
в относительных величинах:
 и
и
 ;
;в относительных значениях отклонений:
 и
и
Форма записи входной и выходной величин зависит от отсутствия или наличия линеаризации и других соображений, определяющих удобство и правильность применения уравнений.
Следует в дальнейшем помнить, что хвх и хвых являются функциями времени.
Из уравнения динамики легко может быть получено уравнение статики, если принять все производные входной и выходной величин равными нулю
(в положении равновесия входная и выходная величины не изменяются):
а0хвых=b0xвх. [2.3]
2.2. Решение дифференциальных уравнений
Если
на вход САР поступило возмущающее
воздействие хвх(τ),
то система начнет работать и переходить
из одного состояния равновесия в другое.
Изменение выходной величины вовремя
этого перехода хвых(τ)
называется переходным процессом.
Переходный процесс может быть получен
как решение дифференциального уравнения
при известном хвх(τ)
и заданных начальных условиях. Под
начальными значениями понимается
значение выходной величины и всех ее
производных до (n-1)-ой
в нулевой момент времени
![]() ,
,
![]() ,
,
![]() …
…![]() .
При исследовании САР наиболее
распространены нулевые начальные
условия, когда выходная величина и все
ее производные, включая
.
При исследовании САР наиболее
распространены нулевые начальные
условия, когда выходная величина и все
ее производные, включая
(n-1)-ую, равны нулю =0, =0, =0, =0.
Методы решений дифференциальных уравнений с постоянными коэффициентами известны из курса высшей математики. Так решение уравнения (2.1.) находится как сумма двух составляющих – свободной и вынужденой:
хвых(τ)=хвых.с.+хвых.в. [2.4]
Вынужденная составляющая хвых.в является частным решением исходного дифференциального уравнения:
![]() [2.5]
[2.5]
и определяется
![]() ,
[2.6]
,
[2.6]
где Ск – постоянная интегрирования;
рк – вещественные корни характеристического уравнения
аnpn+ an-1pn-1+…+a2p2+a1p1+a0=0 [2.7]
Каждая
пара сопряженных комплексных корней
рк=αк![]() jωк
характеристического уравнения (1.13.)
дает в решении (1.11.) составляющую вида
jωк
характеристического уравнения (1.13.)
дает в решении (1.11.) составляющую вида
![]() [2.8]
[2.8]
Значения постоянных интегрирования определяются из начальных условий.
Передаточная функция
Если обозначить d/dt через р, то уравнение (2.1.) можно записать в символическом, так называемом операторном виде
![]()
![]() [2.8]
[2.8]
или
![]() ,
[2.9]
,
[2.9]
где р – некоторое комплексное число, оператор.
Отношение полинома В(р), характеризующего входную величину, к полиному А(р), характеризующего выходную величину, является передаточной функцией.
![]()
![]()
 [2.10]
[2.10]
В знаменателе передаточной функции всегда стоит левая часть
характеристического уравнения - характеристический полином.
Строго говоря, передаточная функция получается из дифференциального уравнения после совершения над ним прямого преобразования Лапласа (одна из операций раздела высшей математики “Операционное исчисление”) при нулевых начальных значениях. При этом входная и выходная величины преобразуются в
функции:
![]() и
и
![]() ,
называемые изображениями входной и
выходной величин. Передаточной функцией
W(p)
называется отношение изображения
выходной величины к изображению входной
при нулевых начальных условиях:
,
называемые изображениями входной и
выходной величин. Передаточной функцией
W(p)
называется отношение изображения
выходной величины к изображению входной
при нулевых начальных условиях:
 [2.11]
[2.11]
=L-1
[xвх(τ)];
![]() =
=
![]() .
.
Видно, что передаточная функция полностью совпадает с выражением (2.10.), полученным из символической формы записи дифференциального уравнения (2.8.).
Передаточная функция так же, как и дифференциальное уравнение, полностью характеризует динамику элемента и системы автоматического регулирования, но поскольку она не содержит производных, а является алгебраическим выражением, то существенно упрощает операции по получению динамических характеристик сложных систем, состоящих из различно соединенных элементов.
Переходная функция.
При сравнении динамических свойств элементов и систем удобно рассматривать их реакции на некоторые типовые входные воздействия. Одним из таких типовых воздействий является единичная ступенчатая функция 1(τ)
(рис 2.1).
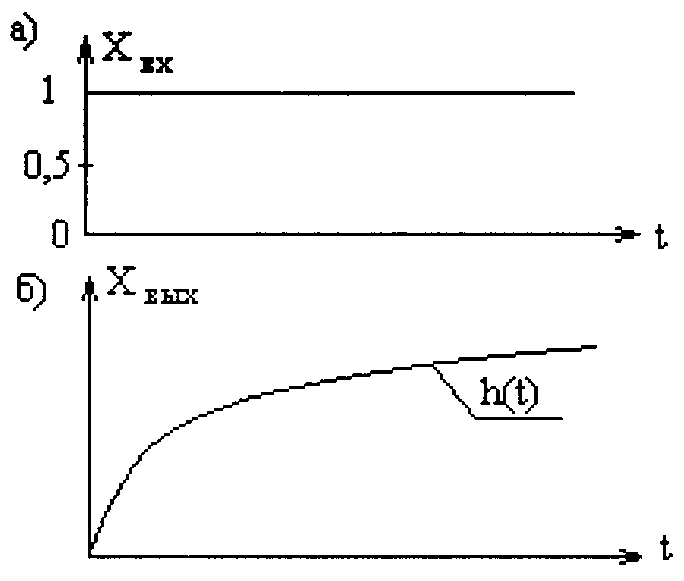
Рис. 2.1 Переходная функция объектов управления:
а – единичная ступенчатая функция 1(t);
б – переходная функция h(t).
1(τ)=![]() (1.17.)
(1.17.)
Переходный процесс в элементе или в системе после поступления единичного ступенчатого входного воздействия хвх(τ)=1(τ) называется переходной функцией и обозначается h(τ).
Переходная функция h(τ) является решением дифференциального уравнения при нулевых начальных условиях и хвх=1, а также может быть найдена по формуле Хевисайда с использованием передаточной функции
h(τ)=W(0)+ ,
(1.18.)
,
(1.18.)
где рк – корни характеристического полинома уравнения А(р), стоящего в знаменателе передаточной функции (корни характеристического уравнения);
В(рк) – значение числителя передаточной функции при р=рк;
W(0) – значение передаточной функции при р=0;
n – порядок дифференциального уравнения.
![]() -
значение производной знаменателя
передаточной функции при р=рк.
-
значение производной знаменателя
передаточной функции при р=рк.
Практика 2
Нелинейные модели непрерывно-дискретных систем
Нелинейные системы автоматического регулирования
Нелинейные САР - это системы, описываемые нелинейными дифференциальными уравнениями, причем такими, которые не поддаются линеаризации методом малых отклонений. Например, дифференциальное уравнение такой системы имеет вид:
![]() ,
,
где F(Xвх) - нелинейная функция.
Некоторые элементы нелинейных САР имеют нелинейные статические характеристики, неподдающиеся линеаризации методом малых отклонений, или, как говорят, существенно нелинейные характеристики. Наличие в системе даже одного нелинейного элемента (все остальные линейные) делает систему в целом нелинейной.
Рассмотрим статические характеристики типичных нелинейностей, встречающихся в системах регулирования.
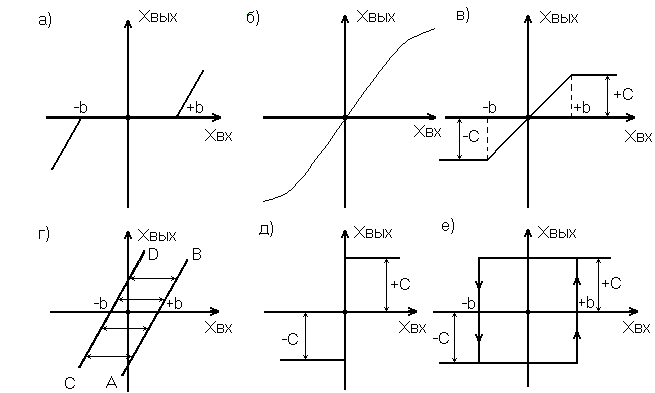
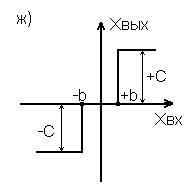 Рис.1
Статические характеристики типичных
нелинейных элементов
Рис.1
Статические характеристики типичных
нелинейных элементов
а) – с зоной нечувствительности; б) – с насыщением; в) – с ограничением; г) – с гистерезисной петлёй люфта; д) – двухпозиционная; е) – двухпозиционная с зоной неоднозначности; ж) – трёхпозиционная.
Часто встречается нелинейные элементы со статической характеристикой, имеющей зону нечувствительности и определяемую интервалом изменения входной величины элемента: (-b < ХВХ < b), в пределах которой выходная величина не изменяется (не чувствует изменения входной величины) (Рис.1,а). Такая характеристика свойственна например электрическим исполнительным механизмам: электродвигатель при подаче на его клеммы небольшого напряжения не будет вращаться до тех пор, пока напряжение не увеличится и создаваемый им момент вращения не превысит момент трения и момент от нагрузки на валу двигателя.
Для большинства усилительных и исполнительных элементов характерны нелинейности с насыщением (рис.1,б) или с ограничением (рис.1,в), т.к. мощность усилителя и перемещение исполнительного механизма всегда ограничены.
В механических передачах и других устройствах встречается нелинейность называемая гистерезисной петлёй люфта (рис.1,г).
Пусть ХВХ – угол поворота ведущей шестерни редуктора;
ХВЫХ – угол поворота ведомой шестерни редуктора.
При увеличении ХВХ величина ХВЫХ остается неизменной, пока не будет выбран люфт (зазор) в зацеплении шестерен; при дальнейшем увеличении ХВХ величина ХВЫХ изменяется по прямой АВ.
После остановки в любой точке АВ и обратном движении в направлении уменьшения ХВХ величина ХВЫХ остается постоянной (горизонтальные отрезки характеристики) до тех пор, пока снова не будет выбран зазор величиной 2b, после чего ХВЫХ начнет уменьшаться по прямой DC.
Для различных электромеханических устройств типичны релейные характеристики, в которых непрерывному изменению ХВХ соответствует скачкообразное изменение ХВЫХ при определенных значениях ХВХ, а между этими значениями величина ХВЫХ остается постоянной.
Идеальная релейная характеристика, описывающая работу двухпозиционного реле, показана на рисунке 1,д.
Реальные двухпозиционные реле имеют статическую характеристику с зоной неоднозначности (рис.1,е), т.е. в пределах зоны неоднозначности (–b < ХВХ < +b) выходная величина может иметь значения в пределах u + C, u – C в зависимости от направления изменения ХВХ.
В случае увеличения ХВХ, переход с одного значения на другое происходит в точке +b, в случае уменьшения ХВХ переход с одного значения на другое происходит в точке –b.
Релейная характеристика с зоной нечувствительности (–b < ХВХ < +b) описывает работу трехпозиционного реле (рис.1,ж).
Кроме рассмотренных нелинейных статических характеристик, элементы автоматики могут иметь и другие нелинейные статические характеристики или даже комбинацию рассмотренных выше нелинейных статических характеристик.
Для описания проведения нелинейных систем в ТАУ существует ряд сложных методов: метод фазовой плоскости, метод гармонической линеаризации и т.д.
Одной из главных особенностей нелинейных систем является возникновение в них, как правило, незатухающих колебаний регулируемой величины, называемых автоколебаниями. Эти колебания не наложены извне, а являются результатом внутренних свойств нелинейной системы. Автоколебания - наиболее распространенный режим работы нелинейных систем и поэтому нелинейные системы считаются устойчивыми и тогда, когда в них возникают устойчивые автоколебания (в линейных системах автоколебания возникнуть не могут и незатухающий колебательный переходный процесс является только границей при переходе системы из устойчивой в неустойчивую).
Наиболее распространены нелинейные системы, в которых нелинейность сосредоточена в управляющем устройстве, называемом релейным регулятором. Сама система также называется релейной.
Релейные системы (регуляторы) делятся на:
1) позиционные;
2) системы (регуляторы) с постоянной скоростью исполнительного механизма.
Их статические характеристики приведены на рисунке 2.
Рис.2 Статические характеристики позиционных регуляторов
А) двухпозиционный идеальный;
Б) двухпозиционный с зоной неоднозначности;
В) трехпозиционный.
Входной величиной служит отклонение ε регулируемой величины Х от заданного значения Х0: e=Х0-Х, а выходной - положение регулирующего органа Y. При этом за ноль принято среднее положение регулирующего органа, а +С и -С означают соответственно полное открытие (+С) и полное закрытие (-С) регулирующего органа. Регулирующим органом может быть клапан, а исполнительным механизмом – соленоид, открывающий и закрывающий его. При регулировании электрических печей регулирующий орган как таковой отсутствует, а включение и выключение нагревателей осуществляется, например, электромагнитным контактором (или может быть и бесконтактное позиционное управление мощностью). На рис.2,а – изображена статическая характеристика идеального двухпозиционного регулятора (регулирующий орган может занимать только 2 позиции - полностью открытое и полностью закрытое положение).
Реальные двухпозиционные регуляторы (рис.2,б) имеют статическую характеристику с зоной неоднозначности шириной 2b, которая вводится преднамеренно с возможностью изменения её величины.
Статическая характеристика трехпозиционного регулятора (рис.2,в) показывает, что регулирующий орган может занимать три позиции: полностью открытое (+С), полностью закрытое (-С) и среднее положение. Значение интервала –b < ε < +b называется зоной нечувствительности δ=2b.
Рассмотрим переходный процесс в релейной системе
график переключения регулирующего органа
Y

+C
 τ
τ
0

-C
переходный процесс при 2-хпозиционном регулировании

![]()



 X
X
-b

![]()
X0
+b
 τ
τ
Увеличение ширины зоны неоднозначности приводит к увеличению амплитуды автоколебаний а* и периода автоколебаний Т* и уменьшению угловой частоты автоколебаний w*=2p/ Т*.
Незатухающий колебательный процесс допустим тогда, когда амплитуда автоколебаний а* укладывается в допустимые по технологическим соображениям пределы динамического отклонения регулируемой величины от заданного значения.
Рассмотрим работу трехпозиционного регулятора на примере регулирования температуры в электрической печи.
При трехпозиционном регулировании задаётся не одно значение температуры, а зона заданного значения температуры
Х0 – b < X < X0 + b, которая совпадает с зоной нечувствительности, Х0 – означает середину заданной зоны. В зависимости от величины и знака отклонения ε подается максимальная мощность Pmax, средняя мощность РСР или минимальная мощность Pmin (см. рис.3).
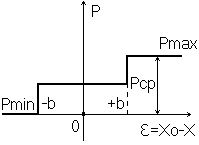
Рис. 3 Статическая характеристика трехпозиционного регулятора температуры
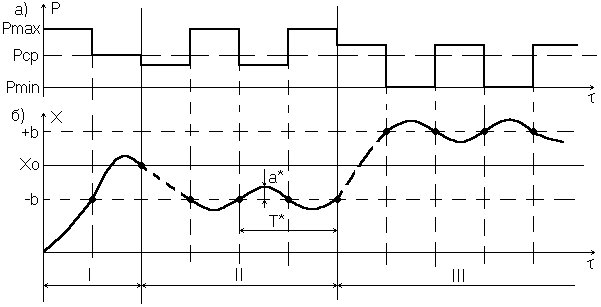
Рис. 4. а - график переключения мощности; б – переходный процесс при трехпозиционном регулировании температуры в печи
Возможны три режима:
В I режиме РСР=РН, где РН – номинальная мощность, необходимая для поддержания температуры в печи в заданных пределах. В этих условия при разогреве печи или после возмущающих воздействий температура входит в заданные пределы без возникновения автоколебаний. Температура может иметь любое значение в пределах зоны нечувствительности (в заданных пределах), т.е. точность регулирования составляет ±b.
В режиме II РСР < РН, т.е. подаваемая в средней позиции мощность недостаточна для поддержания температуры в заданных пределах. Например, уменьшилось напряжение питания, тогда температура в печи будет уменьшаться (штриховая линия) и установятся автоколебания около нижней границы заданной зоны. Система будет работать в двухпозиционном режиме при переключении мощности с РСР на Pmax и обратно.
В режиме III РСР > РН, т.е. подаваемая в средней позиции мощность больше мощности, необходимой для поддержания температуры в заданных пределах. В этом случае температура в печи будет возрастать, а затем установятся автоколебания вокруг верхней границы заданной зоны температур. Система также будет работать в двухпозиционном режиме при переключении мощности с РСР на РН и обратно.
При работе в режимах II и III средние значения температуры, вокруг которых устанавливаются автоколебания, отличаются от Х0 на величину ±b, т.е. как бы возникает статическая ошибка ХСТ=±b.
Преимущество трехпозиционного регулирования перед двухпозиционным заключается в том, что можно получить в некоторых случаях не колебательный переходный процесс, и что амплитуда и частота автоколебаний получаются меньше (при одинаковых характеристиках печи и Pmax).
Релейные системы с постоянной скоростью исполнительного механизма применяются при использовании регулируемых органов типа клапанов, заслонок и других, перемещаемых электродвигателями. Работа электрического исполнительного механизма происходит в релейном режиме, характеризуемом статической характеристикой (рис.5).
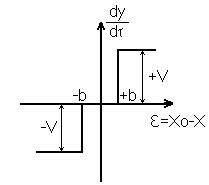
Рис.5 Статическая характеристика релейного регулятора с постоянной скоростью исполнительного механизма
Если отклонение регулируемой величины от заданного значения ε > b, то двигатель открывает регулируемый орган с постоянной скоростью dy/dτ = +υ; если ε находится в пределах зоны нечувствительности –b < ε < +b, то двигатель стоит; если ε < -b, то двигатель закрывает регулирующий орган с постоянной скоростью dy/dτ = -υ (величина скорости двигателя постоянна, а направление вращения меняется, что и характеризуется соответствующим знаком).
При использовании релейных регуляторов с постоянной скоростью ИМ в системе, как правило, также возникают автоколебания, особенно в астатических объектах.
Практика 3
Типовые динамические звенья
При анализе и синтезе САР удобно представлять их состоящими из простых элементов, называемых типовыми динамическими звеньями. Динамические звенья подразделяются только по динамическим свойствам (т.е. виду дифференциального уравнения), которые могут быть одинаковы при различной физической сущности процесса в звене, т.е. одним и тем же типом динамического звена охватываются элементы, в которых протекают разные физические процессы (электрические, тепловые, гидравлические и др.).
Типовое звено не обязательно представляет собой отдельный конструкционный элемент системы, а может быть частью такого элемента. Тогда элемент системы (объект регулирования, регулятор, чувствительный элемент и пр.) будет представляться определённым соединением типовых динамических звеньев. Типовые динамические звенья имеют общие свойства:
Одну входную и одну выходную величины;
Дифференциальные уравнения не выше 2-го порядка;
Пропускают сигнал только в одном направлении (детектирующие свойства) т.е. Хвх влияет на Хвых, а не наоборот
Все типовые звенья подразделяются на статические, астатические (интегрирующие), дифференцирующие и звено чистого запаздывания.