

Уравнения линейных систем управления
Методы анализа и синтеза линейных систем управления
Передаточная функция
Переходная и импульсная переходная функции
Частотные характеристики
Анализ и синтез линейных систем управления обычно осуществляется одним из двух основных методов:
метод, использующий преобразованя Лапласа и Z-преобразования, передаточных функций, структурных схем и графов (частотный метод);
метод пространства состояний, отождествляемый с современной теорией управления. При изучении цифровых состем управления метод пространства состояний имеет следующие преимущества перед частотным методом:
описание в пространстве состояний является естественным и удобным для решения задач на ЭВМ;
позволяет унифицировать описание цифровых систем с различными типами квантования;
позволяет унифицировать описание одномерных и многомерных систем;
может применяться к некоторым типам нелинейных и нестандартных систем.
В пространстве состояний непрерывная система описывается системой дифференциальных уравнений первого порядка, называемых уравнениями состояния.
![]() =Ax(t)+Bu(t),
=Ax(t)+Bu(t),
Y=Cx(t)+Du(t),
где A - матрица размерности nxn,
B - матрица размерности nxm,
C - матрица размерности nxq,
D - матрица размерности qxm.
Однако не должно складываться впечатления, что использование метода пространства состояния для анализа и синтеза систем управления всегда имеет очевидные преимущества. Достоинства хорошо известного частотного метода состоит в его компактности, и большое число задач проектирования реальных систем управления по-прежнему решаются с использованием методов синтеза, основанных на определении передаточной функции.
Рассмотрим в первую очередь вопросы анализа и синтеза линейных ситем управления с применением первого метода. Из теории автоматического управления известно,что совокупность технических средств(машин, орудий труда, средств механизации) выполняющих технологический процесс, является объектом управления (ОУ). Совокупность средств управления и объекта образует систему управления. Всякий ОУ характеризуется совокупностью физических величин, называемых показателями, координатами, а иногда параметрами. Необходимость в управлении значениями координат возникает в том случае, когда нормальный ход процесса нарушается из-за различного рода возмущении, т.е. колебаний нагрузки, воздействий внешней среды или внутренних помех.
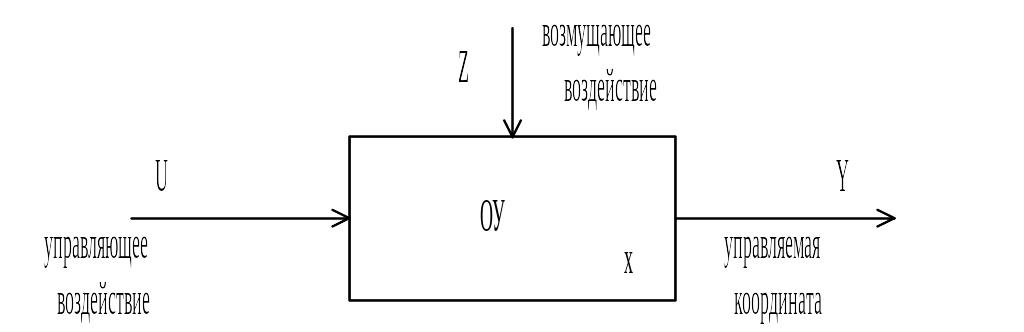
Рис. 1. Обобщенная математическая модель объекта управления x=A(Z,U).
В простейшем случае, когда А – функциональная зависимость: x=F(Z,U), и если ОУ являются безинерционным, то зависимость называют статической характеристикой ОУ.
Если ОУ обладает инерцией, то изменение координат под воздействием возмущений Z или управлений U происходят не мгновенно и в этом случае объект называют динамическим, а оператор А в этом случае является дифференциональным уравнением (или ситемой ДУ). Изменения координат в нормальном требуемом ходе технологич. процесса (ОУ) определяются совокупностью правил, предписаний или математических зависимостей, называемых алгоритмом функционирования. В ТАУ алгоритм функционирования считают заданным. Алгоритм управления будет зависеть как от алгоритма функционирования, так и от динамических свойств системы и возмущений.
Оператор А (а также структурные схемы) САУ называют её математической моделью. Такое название обусловлено тем, что при математическом описании физических процессов всегда делают какие-либо допущения и приближения.
Приведем пример академика Л.С. Понтрягина, в котором показывается, как можно математически описать движение материальной точки в трехмерном евклидовом пространстве.
Механическое
состояние этой точки в каждый момент
времени определяется шестью величинами:
геометрическими координатамиточки x1,
x2,
x3,
и скоростями
![]() которые
будут составлять векторную скорость
которые
будут составлять векторную скорость
![]() .
Движение точки в пространстве определяется
следующим уравнением:
.
Движение точки в пространстве определяется
следующим уравнением:
![]() ,
(1)
,
(1)
где
m-масса
точки,
![]() - её ускорение, а
- её ускорение, а
![]() - сила, действующая на точку, которая
здесь предполагается зависящей от
положения
- сила, действующая на точку, которая
здесь предполагается зависящей от
положения
![]() точки в пространстве. Уравнение (1) можно
использовать в качестве математической
модели движения летательного аппарата
(ЛА). Здесь
=(x1,
x2,
x3)
– движение центра тяжести ЛА. Однако в
действительности движениеЛА зависит
от его ориентации в пространстве как
твердого тела и тяги двигателя, которую
обозначим через
.
Тогда уравнение (1) запишется в виде:
точки в пространстве. Уравнение (1) можно
использовать в качестве математической
модели движения летательного аппарата
(ЛА). Здесь
=(x1,
x2,
x3)
– движение центра тяжести ЛА. Однако в
действительности движениеЛА зависит
от его ориентации в пространстве как
твердого тела и тяги двигателя, которую
обозначим через
.
Тогда уравнение (1) запишется в виде:
![]() ,
(2)
,
(2)
Величина называется управлением. Выражение (2) является системой дифференциальных уравнений, которая описывает поведение объекта управления в пространстве и времени.
Рассмотрим далее одномерный ОУ (рис.1), поведение которого описывается дифференциальным уравнением 2-го порядка:
![]() ,
(3)
,
(3)
Это уравнение динамики системы.
Пусть при постоянных входных величинах U= U0 и Z= Z0 процесс в ОУ с течением времени установится, т.е. величина x= x0 , тогда уравнение (3) примет вид:
![]() ,
(4)
,
(4)
Это уравнение статики системы. Статическую характеристику можно построить экспериментально, подавая на вход системы постоянное воздействие и измеряя выходную величину x0 после окончания переходного процесса, или расчетным путем используя уравнение статики.
Уравнение (3) записывают в символическом виде:
![]() ,
(5)
,
(5)
или в следующем виде:
![]() ,
(6)
,
(6)
где
![]() ,
,
Введем обозначения:
![]() -
собственный оператор,
-
собственный оператор,
![]() -
операторы воздействия.
-
операторы воздействия.
Тогда уравнение (6) можно записать в операторной форме:
![]() ,
(7).
,
(7).
Передаточная функция.
Отношение оператора воздействия к собственному оператору называют передаточной функцией или передаточной функцией в операторной форме. ОУ (рис.1.) можно характеризовать двумя передаточными функциями: