

13.3Вопросы
Какое распределение называется Полигаусовским?
Какие процессы называются Марковскими?
Что является среднеквадратической ошибкой системы?
Что называется формирующим фильтром?
14Лекция №14 Синтез линейных стационарных систем
14.1Проектирование сау
Задача проектирования или синтеза системы автоматического управления состоит в выборе структурной схемы параметров и способа технической реализации системы из условия обеспечения ряда требований, которые следуют из назначения проектированной системы и обеспечения ее характеристик.
В наиболее простом виде требования к проектируемой системе могут быть заданны в виде показателей качества работы системы. Например, допустимых значений статистической, динамической и среднеквадратической ошибок. При этом должны быть выполнены следующие условия:
Известны характеристики управляющих и возмущающих воздействий.
Детерминированные воздействия должны быть заданны как функция времени или их производные.
Случайные сигналы и помехи определяются своими корреляционными функциями и спектральными плотностями.
При такой постановке синтез системы автоматического управления сводится к выбору структурной схемы, с помощью которой можно обеспечить заданные показатели качества работы системы не хуже заданных. При минимизации значения суммарной среднеквадратичной ошибки возможно проектирование оптимальной системы автоматического управления.
В более общей постановке задачи синтеза оптимальных систем сводится к достижению минимума функционала вида:
![]() , (*)
, (*)
где
![]() - квадратичная форма относительной
ошибки системы e(t);
- квадратичная форма относительной
ошибки системы e(t);
![]() - квадратичная форма относительно
сигнала управления U(t);
- квадратичная форма относительно
сигнала управления U(t);
T – время работы системы.
Первая квадратичная форма в функционале (*) выбирается из требований, предъявляемых к точности проектируемой системы, а вторая форма учитывает ограничения на сигнал управления. При этом задача оптимального синтеза формулируется следующим образом: из допустимого множества U(t) необходимо выбрать и технически реализовать такой сигнал управления, который переводит объект из начального состояния в конечное и при этом минимизирует функционал (*).
Помимо требований к качеству функционирования в процессе синтеза систем автоматического управления предъявляются требования и к их сложности. Всегда желательно, чтобы спроектированная система была простой, а требования к элементам системы – минимальными. В качестве функционала сложности можно применять следующий интеграл:
![]()
где WP(j) – частотная характеристика разомкнутой системы;
Чем меньше значение данного интеграла, тем ниже требования к устройствам системы. Помимо требований к качеству работы системы и ее сложности предъявляется и ряд требований, связанных с надежностью работы, стабильностью характеристик при изменении условий окружающей среды, условий эксплуатации. В настоящее время теория оптимальных систем не позволяет объединить все требования к проектируемой системе в виде единого критерия, поэтому выполнение этих критериев зависит от опыта и квалификации инженера-исследователя.
14.2Синтез линейных систем методом частотных характеристик
Метод частотных характеристик удобен для исследования стационарных линейных систем, особенно, если пользоваться логарифмическими частотными характеристиками. Для широкого класса систем фазовая характеристика полностью определяется амплитудной характеристикой.
Известно, что если логарифмическая
амплитудная характеристика системы
имеет достаточно длинный участок с
наклоном 20l дБ / дек,
то ее фазовая характеристика в середине
этого участка близка к
![]() .
.
Поэтому при проектировании стационарной
линейной системы следует стремиться к
тому, чтобы частота среза разомкнутой
системы e
приходилась примерно на середину
достаточно длинного участка ее
логарифмической амплитудной характеристики
с наклоном –20 дБ / дек. Это обеспечит
запас устойчивости по фазе близкий к
![]() и достаточный запас устойчивости по
амплитуде замкнутой системы.
и достаточный запас устойчивости по
амплитуде замкнутой системы.
Для разомкнутой системы с одним интегратором типовая асимптотическая амплитудная характеристика имеет вид.
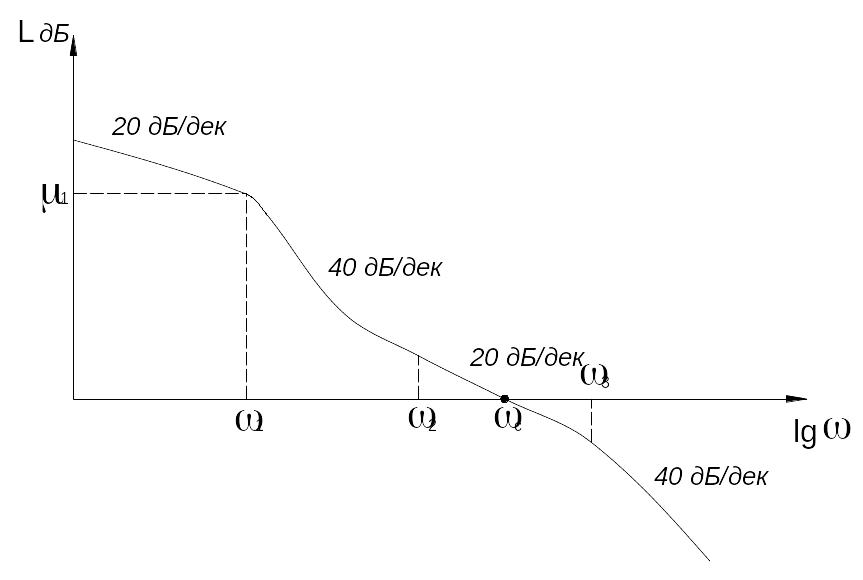
Рисунок 14‑49 Амплитудная характеристика
Передаточная функция такой разомкнутой системы определяется формулой:
![]()
Ордината 1 асимптотической характеристики в первой точке ее излома связана с сопряженными частотами 1, 2 и частотой среза соотношением:
![]()
Поэтому задание величин 1
и
![]() определяет также величину
определяет также величину
![]() .
.
Применение типовых асимптотических характеристик стационарных линейных систем дает возможность свести проектирование системы автоматического управления к следующим простым операциям:
Задаются приемлемые динамические характеристики проектируемой системы.
- tп – время переходного процесса;
- hм – максимум переходной функции;
- tм – время достижения максимума и пр.
По этим характеристикам по специальным таблицам определяют допустимые значения параметров типовой амплитудной характеристики 1, и
 .
При этом, чтобы обеспечить достаточное
удаление частоты среза С
от концов интервала частот с наклоном
амплитудной характеристики –20 дБ /
дек, рекомендуется выбирать величину
от 2 до 4, а 1
выбирать так, чтобы отношение
.
При этом, чтобы обеспечить достаточное
удаление частоты среза С
от концов интервала частот с наклоном
амплитудной характеристики –20 дБ /
дек, рекомендуется выбирать величину
от 2 до 4, а 1
выбирать так, чтобы отношение
 было порядка 10.
было порядка 10.Руководствуясь соображениями технического порядка, выбирают необходимые элементы системы управления: измерители, усилители, исполнительные устройства и другие необходимые элементы и задают допустимые параметры этих элементов. Для полученной таким образом разомкнутой системы строится амплитудная характеристика.
Если полученную характеристику не удается приблизить к типовой путем выбора параметров элементов системы управления, то добиваются этого путем добавления соответствующих корректирующих звеньев.
После окончательного выбора параметров системы определяют динамические характеристики спроектированной системы путем поверочного расчета или моделирования.
Применим изложенный способ к задаче синтеза системы управления манипулятором по перемещению заготовок. Объектом управления здесь служит электродвигатель, осуществляющий слежение манипулятора за выходным сигналом оптического датчика, регистрирующего появление заготовок.
Передаточная функция двигателя имеет вид:
![]()
Примем KД = 1, Tд = 0,5 с.
Зададимся приемлемыми характеристиками системы tп 0,6 с; hм 1,2.
И выбираем согласно рекомендациям
![]()
Примем для упрощения
![]() .
.
Выпишем некоторые значения специальных таблиц:
1 |
|
сtп |
20 |
0,2 |
5,5 |
30 |
0,09 |
7 |
40 |
0,04 |
7,2 |

Рисунок 14‑50 Асимптотическая амплитудная характеристика
Примем сначала 1
= 20 дБ,
![]() .
Следовательно
.
Следовательно
![]() .
Получим tп = 0,55;
.
Получим tп = 0,55;
![]() То
есть типовая характеристика не будет
удовлетворять поставленным требованиям.
Нарисуем логарифмическую амплитудную
характеристику этой системы.
То
есть типовая характеристика не будет
удовлетворять поставленным требованиям.
Нарисуем логарифмическую амплитудную
характеристику этой системы.
Выбираем в качестве датчика параметра управления сельсины, работающие в трансформаторном режиме. Пару сельсинов можно считать усилителями с коэффициентом усиления kс. В качестве усилителя напряжения выберем электронный усилитель, коэффициент которого обозначим kу. В качестве усилителя мощности выбираем электромашинный усилитель. Его передаточная функция определяется формулой:
![]() ,
,
где Tу – постоянная времени цепи входной обмотки, Tп – постоянная времени корректирующей цепи.
Нарисуем структурную схему полученной системы.

Рисунок 14‑51 Структурная схема
где д – угол от оптического датчика заготовку;
м – угол от манипулятора на заготовку.
Асимптотическая амплитудная характеристика полученной системы показана на рисунке 14-2 пунктиром. Можно добиться совпадения характеристики системы с типовой, с помощью подключения корректирующего звена с передаточной функцией:
![]() .
.
Такое корректирующие звено можно реализовать с помощью RC цепочки, включенной в цепь обратной связи электронного усилителя.