

15.3 Погрешности вращающихся трансформаторов
К ВТ предъявляются высокие требования в отношении точности воспроизведения заданной функциональной зависимости выходного напряжения от угла поворота ротора.
Все погрешности ВТ разделяются на систематические и случайные.
Систематические погрешности обусловлены принципом работы, конструкцией, неточностью изготовления и условиями эксплуатации ВТ. Эти погрешности проявляются в следующем:
1) погрешности, обусловленные принципом работы, в СКВТ проявляются в неточности симметрирования обмоток, а в ЛВТ — в отклонении зависимости U2=f(α) от линейной зависимости при значениях α <60°;
2) погрешности от конструктивных особенностей вызываются изменением магнитной проводимости зазора вследствие зубчатости статора и ротора, в нелинейности кривой намагничивания ВТ;
3) погрешности от неточности изготовления ВТ проявляются асимметрией магнитопровода, неточностью скоса пазов и др.;
4) погрешности, определяемые условиями эксплуатации ВТ, вызываются колебаниями частоты и напряжения в питающей сети, отклонениями температуры окружающей среды за допустимые пределы, предусмотренные ТУ, и т. п.
Случайные погрешности ВТ вызываются разбросом свойств применяемых материалов, нарушением технологического режима изготовления и другими случайными причинами.
Точность ВТ характеризуется следующими показателями:
1. Погрешностью воспроизведения синусоидальной зависимости напряжения от угла поворота (для СКВТ). Эту погрешность обычно измеряют максимальной ошибкой отклонения напряжения от заданной зависимости Uвых, %.
2. Погрешностью воспроизведения линейной зависимости (для ЛВТ), выраженной в угловых минутах или в процентах от Uвых.
3. Асимметрией нулевых точек, заключающейся в следующем. В сеть включают сначала одну обмотку статора, а затем другую, определяя каждый раз такое положение ротора, при котором напряжение на какой-либо его обмотке равно нулю. Теоретически при переключении напряжения с одной обмотки статора на другую угол поворота ротора должен быть равен 90°, но практически он несколько отличается от 90°. Отклонение фактического угла поворота ротора от 90° и определяет асимметрию нулевых точек в угловых минутах.
4. Величиной ЭДС компенсационной обмотки, измеряемой в процентах от наибольшего значения ЭДС обмотки ротора.
5. Величиной остаточной ЭДС обмоток ротора, соответствующей наименьшей ЭДС на выходе ВТ. Эти ЭДС обусловлены наличием паразитных (емкостных и магнитных) связей между обмотками ВТ. Остаточная ЭДС измеряется в процентах от наибольшего значения ЭДС обмотки ротора и находится в пределах от 0,003 до 0,1%.
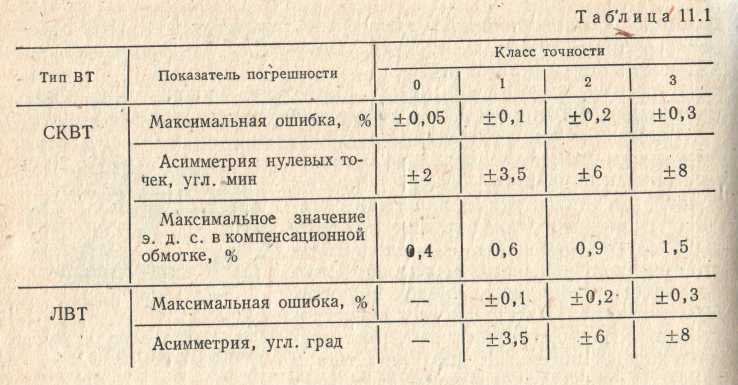
В зависимости от допускаемых погрешностей ВТ подразделяются на четыре класса точности: 0, 1, 2 и 3. Значения основных показателей погрешностей для этих классов приведены табл. 15.1.
5.
Тема №6 СПЕЦИАЛЬНЫЕ СИНХРОННЫЕ ЭЛЕКТРИЧЕСКИЕ МАШИНЫ. РЕАКТИВНЫЕ И ГИСТЕРЕЗИСНЫЕ ДВИГАТЕЛИ
Лекция №16
16.1 Синхронный тахогенератор
1.1 Конструктивно синхронный тахогенератор представляет собой однофазный синхронный генератор небольшой мощности с ротором, возбуждаемым постоянными магнитами. Благодаря возбуждению постоянными магнитами в синхронном тахогенераторе нет скользящих контактов, что выгодно отличает его от тахогенератора постоянного тока. В процессе работы тахогенератора в обмотке статора наводится ЭДС.
 (16.1)
(16.1)
где —
частота ЭДС, наведенной в обмотке
статора, Гц;
—
частота ЭДС, наведенной в обмотке
статора, Гц;
w1 — число витков в обмотке статора;
kw1 — обмоточный коэффициент;
Ф — основной магнитный поток, Вб;
k — постоянный коэффициент;
n — частота вращения ротора, об/мин.
Из выражения (16.1) следует, что ЭДС тахогенератора пропорциональна частоте вращения. Однако с изменением частоты вращения ротора изменяется и частота выходного напряжения.
Реактивные сопротивления зависят от частоты переменного тока:
поэтому
влияние частоты вращения ротора
тахогенератора на частоту ЭДС приводит
к изменениям полного сопротивления как
обмотки статора, так и внешней цепи
(нагрузки). В итоге выходная
характеристика
синхронного тахогенератора
 становится нелинейной. При этом появляется
погрешность, снижающая точность работы
тахогенератора. Указанный недостаток
несколько ограничивает использование
синхронных тахогенераторов в системах
автоматики. Однако они все же применяются
достаточно широко, так как при малых
габаритах имеют значительную по величине
мощность на выходе.
становится нелинейной. При этом появляется
погрешность, снижающая точность работы
тахогенератора. Указанный недостаток
несколько ограничивает использование
синхронных тахогенераторов в системах
автоматики. Однако они все же применяются
достаточно широко, так как при малых
габаритах имеют значительную по величине
мощность на выходе.