

10.2 Характеристики асинхронного исполнительного двигателя с полым немагнитным ротором
О рабочих свойствах асинхронных исполнительных двигателей с полым ротором принято судить по их характеристикам, основными из которых являются:
1. Механические характеристики — зависимости вращающего момента М от частоты вращения n2 при постоянном сигнале управления:
M = f(n2) при Uy = const или β= const.
2. Регулировочные
характеристики — зависимости частоты
вращения n2
от величины или фазы сигнала управления
 при постоянном моменте сопротивления
на валу:
при постоянном моменте сопротивления
на валу:
n2=f(Uу) или n2=f(sinβ) при М= const.
3. Зависимости механической мощности на валу Р2 от частоты вращения n2 при постоянном сигнале управления:
P2 = f(n2) при Uy = const или β= const.
Для придания характеристикам универсальности — пригодности для оценки свойств двигателей различных мощностей, частот вращения и т. п. — их строят в относительных единицах.
За базовые (единичные) величины в системе относительных единиц принимают постоянные для любого двигателя величины:
за единицу момента — пусковой момент Мпуск0. при круговом вращающемся поле;
за
единицу частоты вращения —
синхронную частоту
 ;
;
за единицу мощности — мощность Рпуск0., потребляемую двигателем при пуске, при круговом вращающемся поле;
за единицу напряжения управления — номинальное напряжение управления Uy.ном. , обеспечивающее круговое вращающееся поле при пуске.
Вращающий момент m, частота вращения ν, мощность р2, напряжение управления — коэффициент сигнала α— в относительных единицах находятся как отношения действительных величин М, n2, Р2, Uy к соответствующим базовым (единичным) величинам:
 ;
;  ;
;  ;
;  .
.
На рис. 11.3, 11.4 и 11.5 приведены механические и регулировочные характеристики, а также зависимости механической мощности на валу от частоты вращения для исполнительных двигателей полым немагнитным ротором при следующих способах управления: а — амплитудном; б — фазовом; в — амплитудно-фазовом.
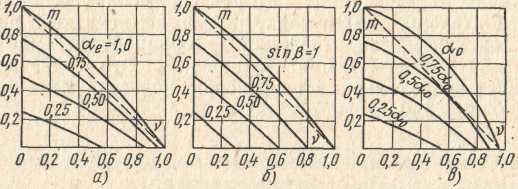
Рис. 11.3. Механические характеристики исполнительного двигателя с полым немагнитным ротором при различных способах управления:
а) амплитудном; б) фазовом; в) амплитудно-фазовом
Механические характеристики m=f(v) исполнительного двигателя с полым немагнитным ротором. При различных способах управления (рис. 11.3) эти характеристики похожи друг на друга. Максимальный момент имеет место при пуске (при ν=0). С увеличением частоты вращения момент постепенно уменьшается и при частоте вращения холостого хода становится равным нулю. Максимальный вращающий момент и максимальную частоту вращения холостого хода двигатель имеет при коэффициенте сигнала, равном единице (αе=1, sinβ= 1).
При уменьшении коэффициента сигнала наблюдается смещение механических характеристик в сторону меньших частот вращения и вращающих моментов.
Механические характеристики при всех способах управления нелинейны — вращающий момент уменьшается с возрастанием частоты вращения не по прямолинейному закону. Наибольшую линейность имеют характеристики при фазовом управлении, наименьшую — при амплитудно-фазовом.
Сравнивая механические характеристики при амплитудном (рис. 11.3, а) и амплитудно-фазовом (рис. 11.3, в) способах управления, можно заметить, что при амплитудно-фазовом управлении двигатель развивает больший момент при средних частотах вращения, но имеет меньшие частоты вращения холостого хода. Первое объясняется тем, что с увеличением частоты вращения ν напряжение UВ непосредственно на обмотке возбуждения конденсаторного двигателя (после конденсатора) не остается постоянным, как при других способах управления, а возрастает. Это вызывает увеличение магнитного потока машины, а следовательно, и вращающего момента.
Уменьшение частоты вращения холостого хода в конденсаторном двигателе по сравнению с двигателем при амплитудном управлении объясняется наличием обратного вращающегося поля, которое имеет место при всех режимах амплитудно-фазового управления, кроме пускового. (ν=0) при α=α0.
Регулировочные характеристики (рис. 11.4). Эти характеристики нелинейны — частота вращения двигателя при всех способах управления с увеличением сигнала управления (αе, sinβ, α) растет не по прямолинейному закону. Последнее является весьма существенным недостатком исполнительных двигателей переменного тока, так как в схемах автоматики всегда стремятся к линейному регулированию.
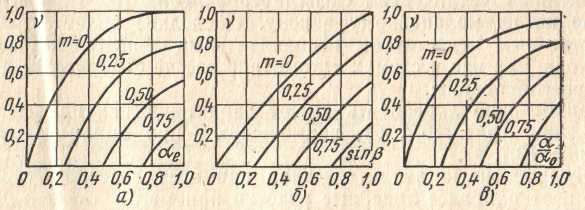
Рис. 11.4 Регулировочные характеристики исполнительного двигателя с полым немагнитным ротором при различных способах управления:
а) амплитудном; б) фазовом; в) амплитудно-фазовом
Наибольшую линейность имеют характеристики при фазовом управлении (рис. 11.4, б), наименьшую —при амплитудно-фазовом (рис. 11.4, в).
Регулировочные характеристики при всех способах управления имеют наиболее линейные участки при малых относительных частотах вращения (в начальной их части). Именно поэтому на практике стараются работать в зоне малых относительных частот вращения, для чего применяют двигатели, рассчитанные на повышенные частоты переменного тока f1:

Рассматривая семейства регулировочных характеристик, нетрудно заметить, что напряжение (сигнал) трогания двигателя, т. е. то минимальное напряжение управления, при котором ротор двигателя, имея определенную нагрузку на валу, трогается с места, пропорционально моменту сопротивления (Uу.тр≡М). Напряжение трогания в относительных единицах (коэффициенты сигнала αе, sinβ, α) равно моменту сопротивления m.
Зависимости механической мощности на валу от частоты вращения p2=f(ν) (рис. 11.5). Эти характеристики нетрудно получить из механических характеристик путем умножения вращающего момента m на соответствующую ему частоту вращения ν:
p2 = mv.
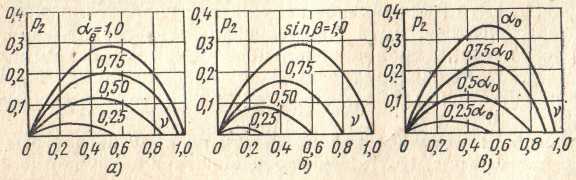
Рис. 11.5 Зависимости механической мощности на валу от частоты вращения исполнительного двигателя с полым немагнитным ротором
Механическая мощность на валу р2 равна нулю при пуске, когда ν=0, и холостом ходе, когда m = 0, и достигает максимума при частотах, примерно равных половине частоты вращения холостого хода.
За номинальную мощность исполнительного двигателя обычно принимают максимальную механическую мощность р2mах. Частота вращения, соответствующая этой мощности, считается номинальной.
Чем больше механическая характеристика приближается к линейной, тем меньше максимальная механическая мощность двигателя и тем ближе номинальная частота вращения к частоте, равной половине частоты холостого хода. Наибольшие номинальные частоты вращения, а следовательно, и максимальные механические мощности имеют двигатели с амплитудно-фазовым управлением (рис. 11.5, в), наименьшие — двигатели с фазовым управлением (рис. 11.5, б).
К положительным свойствам двигателей с полым немагнитным ротором следует отнести: малую инерционность ротора, значительный диапазон регулирования частоты вращения, высокую надежность, бесшумность, хорошую стабильность характеристик.
К недостаткам следует отнести низкие КПД и cosφ, большие габариты и вес.
Лекция №12 АСИНХРОННЫЕ ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ И АСИНХРОННЫЕ ТАХОГЕНЕРАТОРЫ