

2.2 Способы индикации
Существует два способа организации интерфейса МК с линейным дисплеем:
Статический;
Динамический
Первый требует наличия на входах каждого индикатора специальных буферных регистров для хранения кодов выводимых символов. Естественно, что с увеличением разрядности дисплея возрастает число дополнительных микросхем, а следовательно, и стоимость МК-системы.
Второй способ (динамический) основан на том, что любой световой индикатор является инерционным прибором, а человеческому глазу отображаемая на дисплее информация , если ее обновлять с частотой примерно 30 раз в секунду, представляется неизменяемой.
Динамический способ вывода информации на дисплей требует значительно меньших аппаратурных затрат, но более сложного программного обеспечения. Именно этот способ организации вывода информации получил преимущественное распространение в МК-системах.
В данном курсовом проекте используется динамический способ вывода информации на матричный индикатор.
 В
состав данной схемы входят:
В
состав данной схемы входят:
Устройство преобразования уровней (Интерфейс). Интерфейс соединяет два устройства. Линия передачи первого устройства соединяется с линией приема второго и наоборот (полный дуплекс). Для управления соединенными устройствами используется программное подтверждение (введение в поток передаваемых данных соответствующих управляющих символов). Возможна организация аппаратного подтверждения путем организации дополнительных линий для обеспечения функций определения статуса и управления.
Микроконтроллер – это программируемое устройство логического управления.
Так как в задание на курсовой проект заданы такие параметры как: размер символа – 16x10 точек, длина строки- 20 символов, то имеет смысл разбить итоговую матрицу, размер которой составлять 16х200 точек на 10 групп матриц, каждая из которых будет отображать по 2 символа. Группы матричных индикаторов необходимы для отображения информации, получаемой с микроконтроллера. Так же каждая группа оснащена регистрами сдвига по числу строк и столбцов в матрице.
4.Разработка принципиальной схемы.
Основным элементом устройства является микроконтроллер DD2 .
Его задача – обработать информацию, поступающую с ведущей ЭВМ, и сформировать сигнал для правильного отображения символов на индикаторе.
4.1 Выбор микроконтроллера.
В данном курсовом проекте был выбран микроконтроллер LPC2148 фирмы NXP (старший из серии LPC214x), который можно назвать типичным представителем семейства ARM7. Приведем основные параметры и перечислим наиболее важные встроенные аппаратные средства этой микросхемы[6].
а) Максимальная тактовая частота 60 МГц.
б) ПЗУ (FLASH-память) объемом 512 кбайт.
в) ОЗУ объемом 40 кбайт.
г) Два 32-разрядных таймера-счетчика, модуль ШИМ с отдельным таймером, сторожевой таймер, часы реального времени с автономным пита-нием и тактированием.
д) Два десятиразрядных АЦП с временем преобразования 2,44 мкс.
е) Десятиразрядный ЦАП с временем установления 1 мкс.
ж) Приемопередатчики интерфейсов: два UART, два I2C, SPI, SSP, USB 2.0 в режиме Full Speed (12 МГц) с прямым доступом к памяти.
и) Гибкая система управления энергопотреблением.
Могут быть названы следующие основания для выбора микроконтроллеров с архитектурой ARM7:
а) Открытая архитектура становится общепринятым стандартом. Имеются исчерпывающие описания, в том числе на русском языке.
б) Поддержка ядра многими ведущими производителями гарантирует широкую номенклатуру микроконтроллеров, облегчая выбор микросхемы, удовлетворяющей заданным техническим требованиям.
в) Совместимость средств разработки и отладки со всеми микроконтроллерами семейств ARM (в том числе Cortex) дает свободу выбора как самих средств отладки, так и микроконтроллеров. Наиболее известны среды 9 разработки с интегрированным Си-компилятором: μVision фирмы Keil и Em-bedded Workbench фирмы IAR. Внутрисхемная отладка обеспечивается таки-ми средствами, как U-Link2 (фирмы Keil), J-Link (фирмы Segger), а также их многочисленными дешевые аналогами.
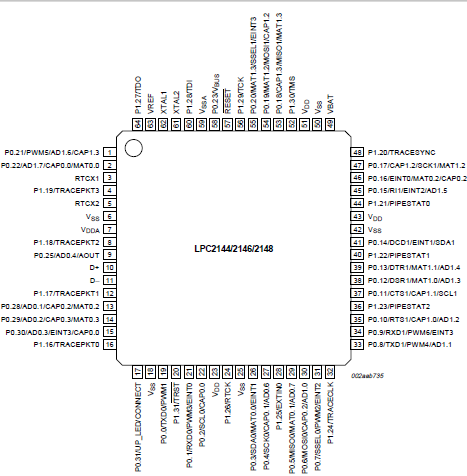
Таблица 1 – Назначение служебных контактов МК LPC2148
Обознач. |
Контакт |
Назначение |
Vdd |
23, 43, 51 |
Питание цифровой части (3.0-3.6 В) |
Vddа |
7 |
Питание аналоговой части (3.0-3.6 В) |
Vss |
6, 18, 25, 42, 50 |
Общая точка цифровой части |
Vssа |
59 |
Общая точка аналоговой части |
RESET |
57 |
Вход сброса. Низкий лог. уровень переводит микроконтроллер в режим сброса. В рабочем режиме должен быть подан высокий уровень |
XTAL1 XTAL2 |
62 61 |
Контакты для подключения основного кварцевого резонатора. На контакт XTAL1 может быть подан внешний тактовый сигнал |
RTCX1 RTCX2 |
3, 5 |
Контакты для подключения кварцевого резонатора для тактирования часов реального времени |
D+ D- |
10, 11 |
Двунаправленная линия передачи данных интерфейса USB |
Vref |
63 |
Опорное напряжение АЦП и ЦАП (2.5-3.6 В) |
Vbat |
49 |
Питание часов реального времени (2.0-3.6 В) |