

Зміст
Розрахунок механізмів маніпуляції…………………………………………..3
Розрахунок систем вентиляції та заземлення………………………………..8
Розрахунок баластного опору…………………………………………...…..10
Розрахунок кабелів і проводів живлення......................................................12
Список використаної літератури…………………………………………....13
Додатки.
Розрахунок механізнмів маніпуляції.
Дано:
Ніж гільйотинних ножиць. Зносостійке покриття. Відновлення робочої поверхні ріжучої кромки. Матеріал: ШХ 18.
Штучне виробництво.

Зносостійке покриття повинне мати високу міцність зчеплення з основою і міцність матеріалу покриття . Вимоги до пористості неоднозначні – покриття на інструменті, наприклад, повинні мати мінімальну пористість, а покриття, які працюють в умовах змащування (поршневі кільця, гільзи циліндрів та ін.), можуть мати значну пористість, що сягає 10…15 %[2].
У групі чистих металів часто використовується молібден та хром; серед сплавів – прості системи Fe-C і складні системи Ni-Cr-B-Si-C та ін.[4].
На зношування добре працюють покриття, які містять тверді частинки та пластичну матрицю. Слабкі міцностні зв’язки між окремими частинками покриття ведуть до їх викрошування.
Тому створення розвиненого металевого каркасу в покритті за рахунок введення пластичного металевого компонента, підвищує опір зношуванню. Вміст пластичної фази може сягати 30…40 % (об’ємних).
В даній технології вибран порошок ПН70Ю30 ТУ 48-1-3282-81 Інтерметалід Ni-Al.
Властивості: Зносостійке, антифрикційні властивості, втомлена міцність твердість 300...310 HB (твердість Ст.30 150 HB)[5]
Так як КТР основного покриття (ШХ 18) при 373К дорівнює 12,9∙10-6К-1, а основний компонент порошку нікель - його коефіцієнт термічного розширення Ni=13∙10-6К-1 при температурі ΔТ=300 К, то нам не потрібен прошарок [2].
Враховуючи те, що зносостійкі покриття складаються з тугоплавких компонентів, тому нам необхідне потужне джерело енергії.
В цьому випадку було обрано спосіб плазмового напилення.
Плазмово-дуговий метод напилення покриттів полягає в формуванні на поверхні деталі покриття з нагрітих та прискорених високотемпературним плазмовим струменем часток матеріалу, при зіткненні яких з поверхнею основи або напиленим матеріалом відбувається їх з’єднання.
Плазмово-дуговий метод рекомендується для напилення захисних, зміцнювальних та інших видів покриття з порошків металів, оксидів, карбідів, нітридів, боридів та інших тугоплавких зєднань, із композиційних порошків та механічних сумішей різних порошків, а також з дротяних матеріалів.
Для напилення ножа гільйотинних ножиць потрібен маніпулятор, що забезпечує одну ступінь свободи. Враховуючи, що ніж довгий та невеликої ширини, потрібна станина не менше 1600мм [1].
Головним призначенням підіймальних механізмів є піднімання та опускання кронштейна, або висунутої штанги на яких закріплені розпилюючи пристрої.
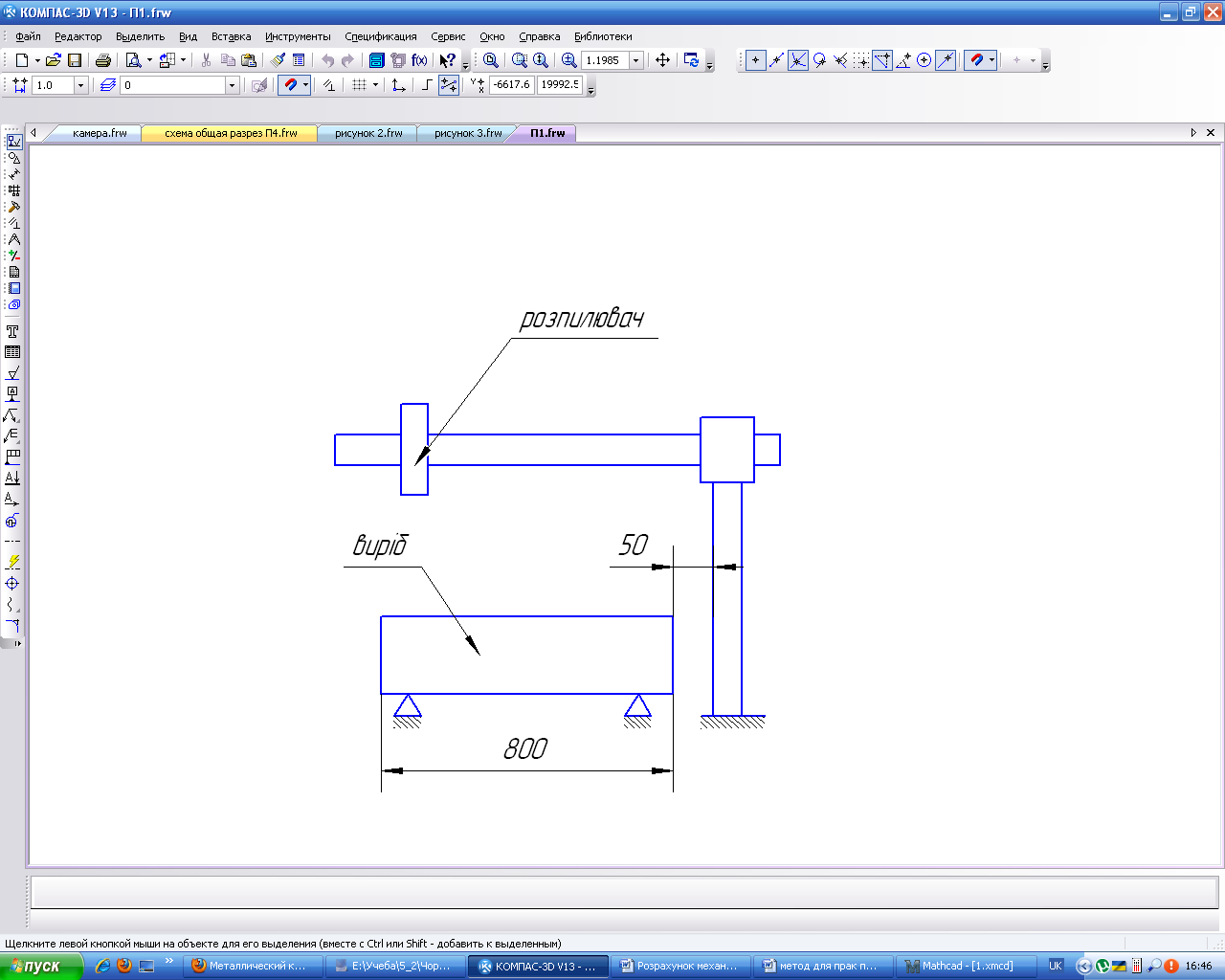
Рисунок 1.1 Схема маніпулятора
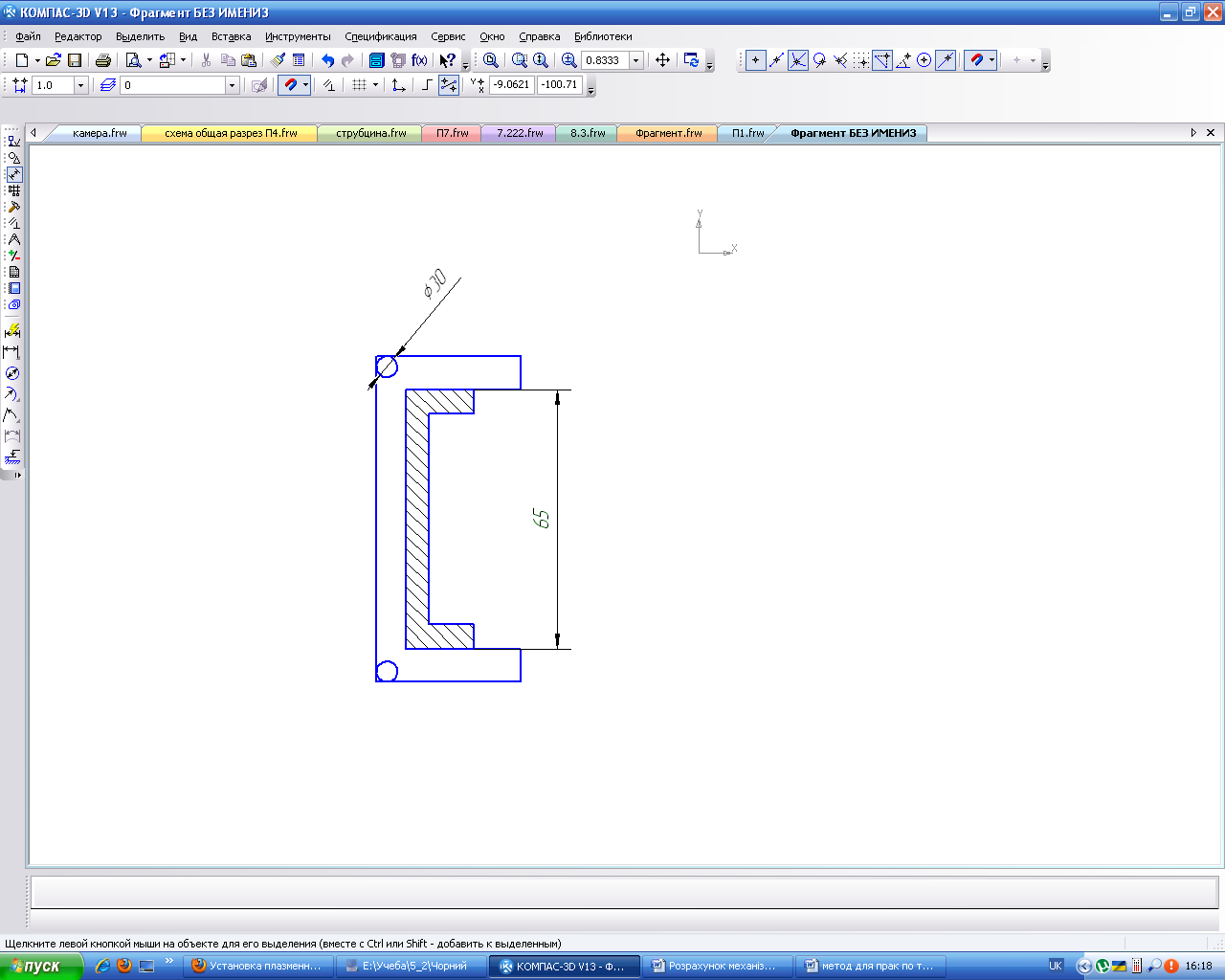
Рисунок 1.2 Схема роликоопори
Виходячи з Рис. 1.2, маємо:
 мм.,
мм.,
Відстань виробу і відстань між штангою буде дорівнювати 850мм.
Виходячи з Рис. 1.1, додамо ще 50мм(для запасу) знаходимо L:
 мм.,
мм.,
Для зручності округлимо значення 932,5 до 960 мм.
Вага тавра довжиною1,2 метра буде складати 15,3 кг, тоді:
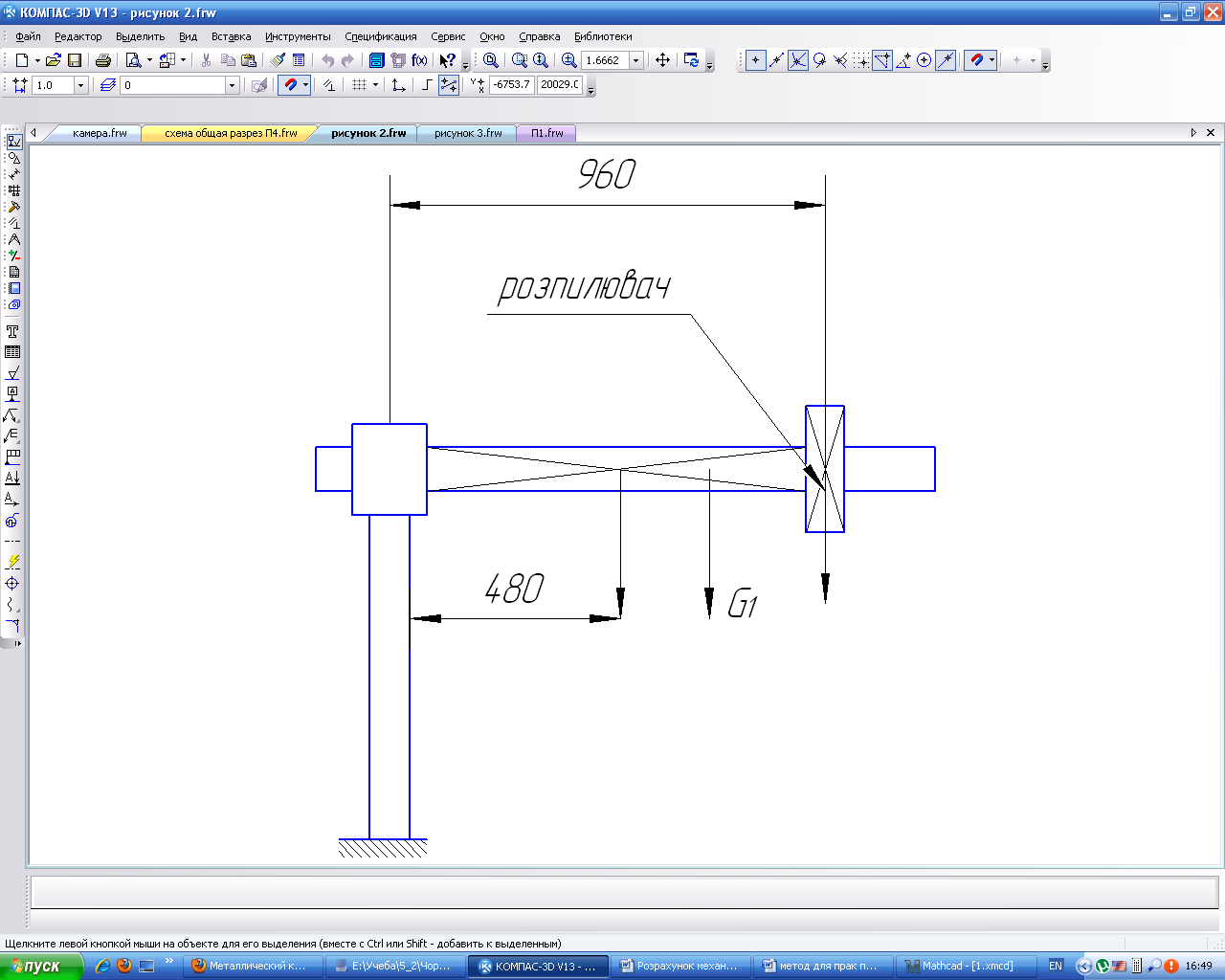
Рисунок 1.3 Схема центра мас
Центр масс знайдемо за формулою:

Головним призначенням підіймальних механізмів є піднімання та опускання кронштейна, або висунутої штанги на яких закріплені розпилюючи пристрої.
Н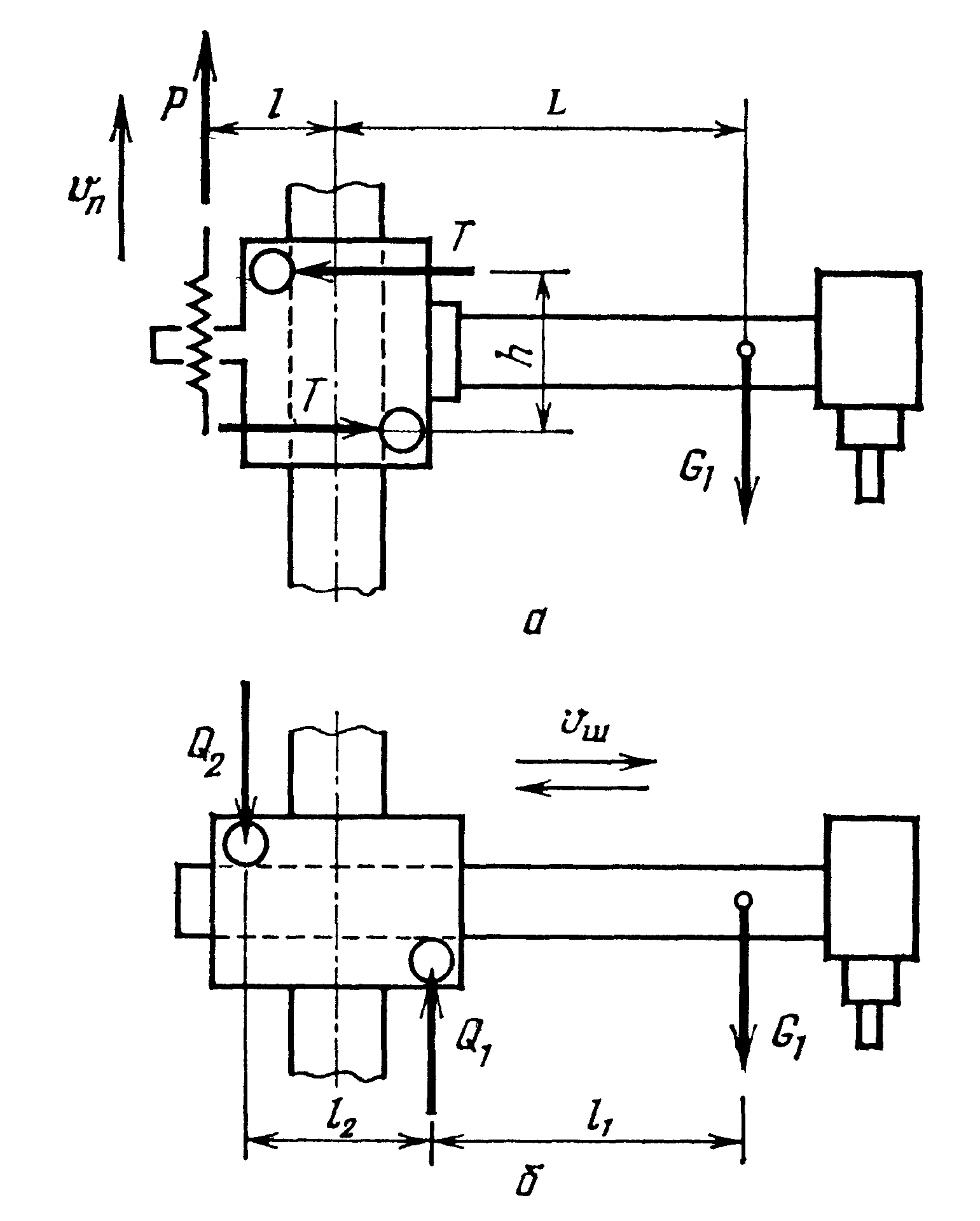 еобхідне
зусилля Р, яке треба для піднімання
штанги, складається з ваги піднімаючого
вантажу G
і опору обертанню направляючих розмірів
каретки, несучої на собі штанги. Вага
всіх піднімаємих частин G
і положення центра тяжіння є заданими
величинами. Опір обертанню направляючих
роликів каретки W,
залежить від величини опорних реакцій
цих роликів Т. З рисунку
1.4,
маємо:
еобхідне
зусилля Р, яке треба для піднімання
штанги, складається з ваги піднімаючого
вантажу G
і опору обертанню направляючих розмірів
каретки, несучої на собі штанги. Вага
всіх піднімаємих частин G
і положення центра тяжіння є заданими
величинами. Опір обертанню направляючих
роликів каретки W,
залежить від величини опорних реакцій
цих роликів Т. З рисунку
1.4,
маємо:
Рисунок 1.4 Рекції опор

 де
плече може дорівнювати нулю при розміщенні
точки підвісу (наприклад гайки гвинта
підвісу) по вісі колони.
де
плече може дорівнювати нулю при розміщенні
точки підвісу (наприклад гайки гвинта
підвісу) по вісі колони.
Опір обертання ролика при підніманні:

де
 -
коефіцієнт тертя в підшипниках роликів,
0,1;
-
коефіцієнт тертя в підшипниках роликів,
0,1;
 -
коефіцієнт, враховуючий тертя по
клиноподібним направляючим 1,5;
-
коефіцієнт, враховуючий тертя по
клиноподібним направляючим 1,5;
 -
коефіцієнт тертя кочення, 0,5;
-
коефіцієнт тертя кочення, 0,5;
Звідки можна визначити піднімальне зусилля

 МПа.
МПа.
де
 -
діаметр ролика;
-
діаметр ролика;
 -
діаметр осі ролика в підшипниках.
-
діаметр осі ролика в підшипниках.
Потужність електродвигуна механізму підйому визначається по формулі:

 кВт.
кВт.
де
 -
швидкість підйому м/хв; взагалі приймають
=1-2м/хв.
-
швидкість підйому м/хв; взагалі приймають
=1-2м/хв.