

1. Структурне дослідження механізму соломо набивача
Призначення і принцип роботи механізму соломо набивача
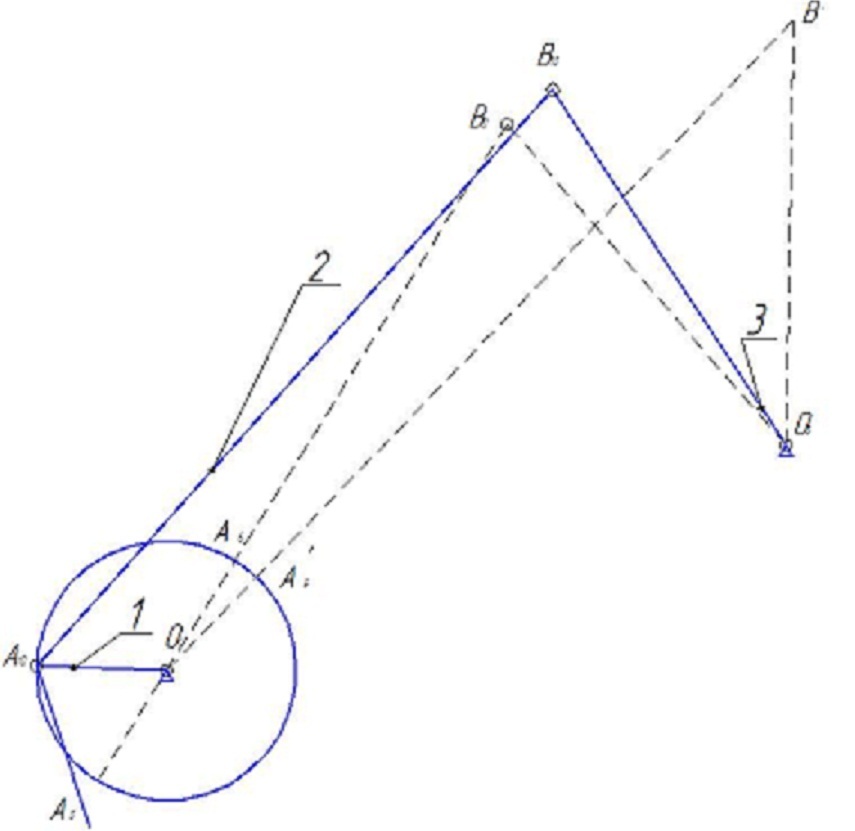
Рис.1 Схема важільного механізму соломонабивача зернозбирального комбайну
На рисунку показана схема чотирьохланочного механізму важеля 01АВОзС соломонабивача, який служить для набивання соломи і ущільнення її в бункері зернозбирального комбайна.
Кривошип 01А обертається з середньою кутовою швидкістю ῳ1. Рух йому передається від двигуна комбайна за допомогою ремінної передачі.
З шатуном АВ жорстко закріплена гребінка АС, яка робить плоскопаралельний рух. При русі коромисла О3В з лівого крайнього положення в праве крайнє положення гребінка проштовхує солому в бункер. При русі коромисла 03В проти годинникової стрілки відбувається холостий хід.
Визначення ступеня вільності механізму
Визначаємо число рухомих ланок і кінематичних пар V класу.
Механізм соломонабивача складається з трьох рухомих ланок (п = 3) і чотирьох кінематичних пар V класу (р5 = 4):
Визначаемо Число ступенів вільності за формулою Чебишова:
W=3n-2p5-p4 (1)
W= 3 *3 — 2*4=1
Розкладання механізму на структурні групи
1.3.1.Виділяемо початкові ланки
У цьому механізмі одна початкова ланка, зайвих зв'язків і зайвих ступенів вільності, а також пар IV класу немає. Початкова ланка і стояк (0,1)
 утворюють
механізм 1 класу.
утворюють
механізм 1 класу.
1.3.2.Розбиваємо механізм на групи Ассура.
Спочатку відокремлюємо ланцюг, який складається з двох ланок 2, 3 і трьох кінематичних пар A, B, O2 ,
Знаходимо число ступенів вільності для залишкової частини механізму:
W=3*2-2*3=0
1.3.3.Визначаемо клас, порядок і вид структурних груп.
Початкова ланка і стояк (0,1) утворюють механізм 1 класу шатун і коромисло (2,3) утворюють механізм II класу I виду.
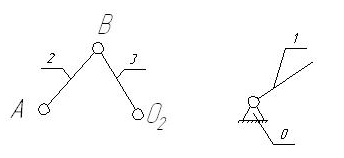
Рис.2 Розкладання механізму на структурні групи
1.4 Формула будови механізму
Склад і послідовність приєднання структурних груп механізму можна виразити формулою будови механізму.
I кл.(0,1)II кл.1 виду(2,3) (2)
Кінематичне дослідження важільного механізму
2.1 Проектування кривошипно-коромислового механізму
- Відкладаю кутову координату крайнього положення ланки 3(коромисла) вона дорівнює 49 град.
- Приймаю що коромисло О3В = 100мм
- Від крайнього положення ланки 3 відкладаю кут розмаху коромисла який дорівнює 42 град.
- Ставлю циркуль в точку О3 і розмахом в 100мм проводжу дугу між крайніми положеннями коромисла та на перехресті ставлю точки В0 і В'.
- Між точками В0 і В' проводжу лінію
 -
Перпендикулярно до відрізка В0 В' проводжу
лінію через точку О3 і опускаю її вниз.
-
Перпендикулярно до відрізка В0 В' проводжу
лінію через точку О3 і опускаю її вниз.
-
За формулою
знаходимо кут між
двома прямими О1В0 і О1В' який позначается
буквою
 .
.
 (3)
(3)  =
= =11.77
град.
=11.77
град.
- Рахую кут В0 В'О
ے В0 В'О = 90˚-⍬=90˚-11.77˚=78.23˚ (4)
- Через цей кут проводжу лінію до перетину з лінією яка перпендикулярна відрізку В0 В' і проходить через точку О3, та на перетині ставлю точку О.
- Ставлю циркуль в точку О і радіусом відрізка О В' проводжу коло.