Постановка задачи
Формулировка
Заданы параметры ДПТ с параллельным возбуждением и требуемые показатели качества позиционного привода. Параметры двигателя и способ синтеза регулятора приведены в таблице 1.
![]() – номинальный ток двигателя якоря;
– номинальный ток двигателя якоря;
![]() – номинальная частота вращения якоря
двигателя;
– номинальная частота вращения якоря
двигателя;
![]() – номинальный момент сопротивления на
валу якоря двигателя;
– номинальный момент сопротивления на
валу якоря двигателя;
![]() – момент инерции вала якоря;
– момент инерции вала якоря;
![]() – индуктивность обмотки якоря ДПТ;
– индуктивность обмотки якоря ДПТ;
![]() – сопротивление обмотки якоря ДПТ;
– сопротивление обмотки якоря ДПТ;
![]() – электрическая постоянная двигателя;
– электрическая постоянная двигателя;
![]() – магнитная постоянная двигателя;
– магнитная постоянная двигателя;
![]() – требуемое время переходного процесса;
– требуемое время переходного процесса;
![]() – требуемое перерегулирование;
– требуемое перерегулирование;
![]() – максимально установившаяся ошибка
регулирования;
– максимально установившаяся ошибка
регулирования;
![]() – амплитуда задающего гармонического
воздействия электропривода;
– амплитуда задающего гармонического
воздействия электропривода;
![]() – частота задающего гармонического
воздействия электропривода;
– частота задающего гармонического
воздействия электропривода;
![]() – требуемый показатель колебательности
синтезируемого привода;
– требуемый показатель колебательности
синтезируемого привода;
![]() – требуемый запас устойчивости по фазе
для синтезируемого привода;
– требуемый запас устойчивости по фазе
для синтезируемого привода;
![]() – момент нагрузки;
– момент нагрузки;
Таблица 1
|
|
|
|
|
|
|
5,5 |
157,0 |
3,2 |
0,059 |
0,40 |
1,3 |
0,019 |
|
|
|
|
|
|
|
|
Метод синтеза |
12,2 |
1,00 |
10 |
0,09 |
1,0 |
1,7 |
1,74 |
51 |
Бесекерского |
Цель и задачи курсовой работы
Целью курсовой работы является приобретение практических навыков и закрепление теоретических знаний по анализу и синтезу систем автоматического управления.
Основная задача курсового проектирования – анализ статических и динамических характеристик системы управления и синтез корректирующих цепей для получения требуемых показателей качества функционирования САУ. При выполнении курсовой работы решаются следующие задачи:
составление структурной схемы исходной системы по заданной функциональной схеме;
проведение анализа динамических и статических свойств исходной САУ;
синтез системы, отвечающей предъявляемым требованиям к ней.
Ход работы
Математическая модель дпт
Получим математическую модель ДПТ
параллельного возбуждения, где входным
воздействием является напряжение U,
возмущающим воздействием –
![]() ,
а выходной переменной является частота
вращения вала ротора.
,
а выходной переменной является частота
вращения вала ротора.
ДПТ параллельного возбуждения описывается следующими дифференциальными уравнениями:
![]()
![]()
![]() – постоянная времени цепи якоря
(электрическая постоянная);
– постоянная времени цепи якоря
(электрическая постоянная);
![]() – коэффициент пропорциональности;
– коэффициент пропорциональности;
![]() – электромеханическая постоянная
времени;
– электромеханическая постоянная
времени;
![]() – коэффициент влияния нагрузки.
– коэффициент влияния нагрузки.
Таким образом, получим математическую модель ДПТ с параллельным возбуждением:
![]()
![]()
Вторая математическая модель ДПТ
Получим вторую математическую модель, в которой выходной переменной является угол поворота вала ротора.
Математическая модель запишется в виде:
![]()
![]()
![]()
![]()
Структурная схема в одноконтурном виде
Запишем структурные схемы, приведя их к одноконтурному виду следующего типа.
Для первой модели.
![]()
![]()
![]()
Для второй модели.
![]()
![]()
Модель пространств и состояний
Составим модель объекта в стандартной форме пространств и состояний.
![]()
![]()
![]()
![]()
![]()
В матричной форме система пространств и состояний примет следующий вид.
![]()
После подстановки значений параметров система пространств и состояний запишется в следующем виде.
![]()
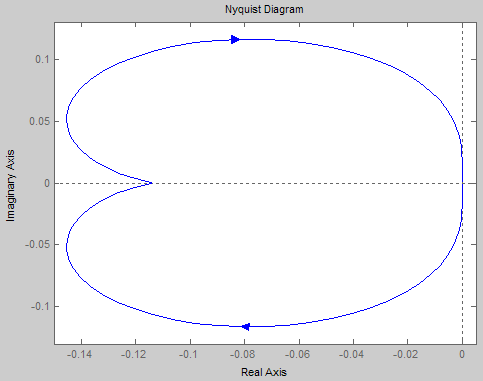
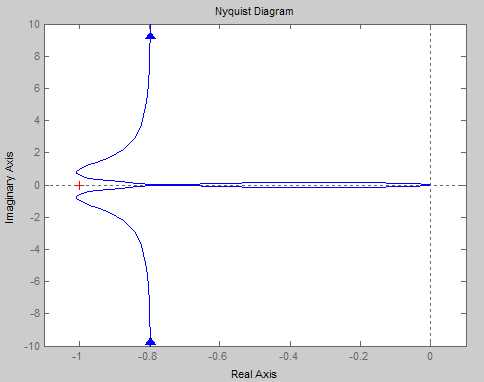
Устойчивость объекта управления
Определим устойчивость объекта управления по характеристическому уравнению. Для решения данной задачи воспользуемся системой MathCAD.
![]()

Корни характеристического уравнения:
![]() ,
,
![]() .
Таким образом, система лежит на границе
устойчивости.
.
Таким образом, система лежит на границе
устойчивости.
Передаточные функции объекта
Получим передаточные функции системы по уравнениям пространств и состояний, воспользовавшись системой MathCAD.
![]()
![]()
![]()
![]()
![]()
![]()
Переходные и частотные характеристики объекта
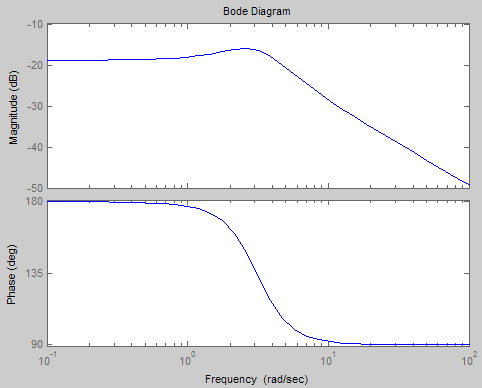
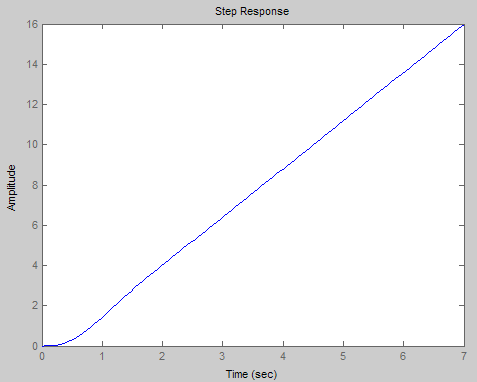


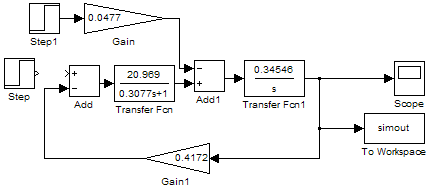
Структурные схемы
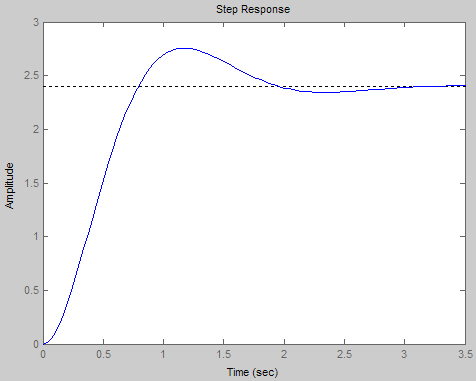
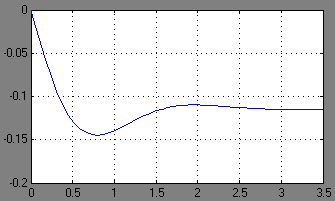
В Simulink построим структурные схемы и получим по ним передаточные функции. Переходная характеристика первой модели по задающему воздействию.
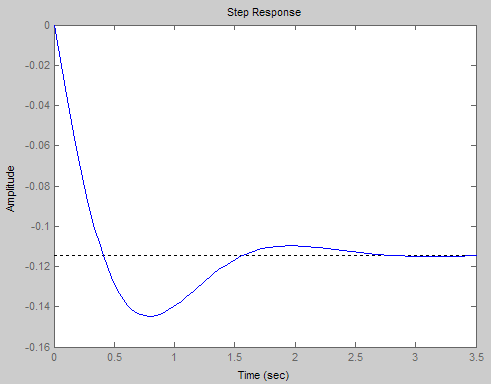
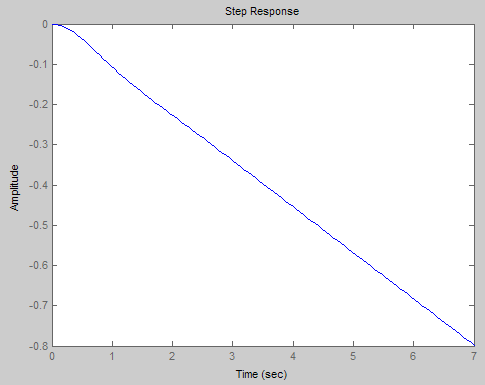
Переходная характеристика первой модели по возмущающему воздействию.
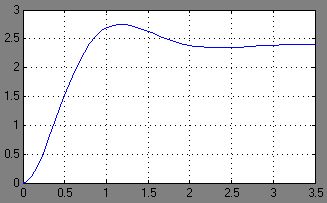
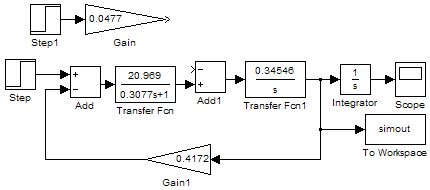
Переходная характеристика второй модели по задающему воздействию.
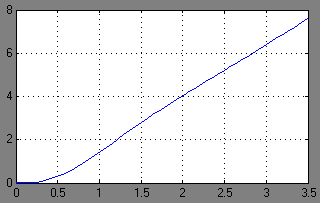
Переходная характеристика второй модели по возмущающему воздействию.

Переходные характеристики, построенные в Simulink, совпадают с переходными характеристиками, построенными в MathLab.
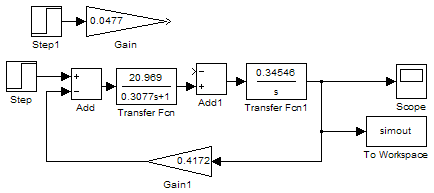
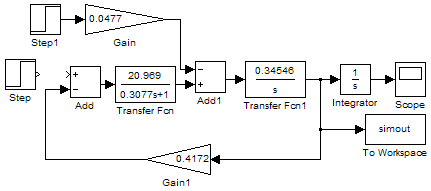
Схема позиционного привода
Построим схему позиционного привода, приведя его к одноконтурному виду.

По правилам структурных преобразований полученная структурная схема преобразуется к одноконтурному виду.

![]()