

5. Основные законы управления автопилотов.
Законом управления или регулирования АП обычно называют простейшее уравнение, отображающее наиболее существенные связи и преобразования, реализуемые автопилотом.
В реальном АП закон управления не может быть точно обеспечен из-за инерционности элементов и нелинейности их характеристик. Поэтому закон управления можно рассматривать еще как уравнение идеального автопилота.
По виду закона управления автопилоты классифицируются на статические и астатические. Статическими называют АП, у которых в установившемся состоянии отклонение руля пропорционально изменению регулируемого параметра (углу отклонения ЛА по соответствующему каналу), а при постоянном внешнем возмущении, действующем на ЛА, имеет место статическая ошибка: установившееся отклонение регулируемого параметра от исходного положения на величину, пропорциональную внешнему возмущению. У астатических автопилотов при наличии постоянного возмущающего воздействия на ЛА статическая ошибка отсутствует (отклонение регулируемого параметра сводится к нулю). В таких АП каждому значению регулируемого параметра соответствует пропорциональная этому отклонению скорость отклонения руля.
Законы управления можно классифицировать по составу суммарного сигнала управления с датчиков: по углу; по углу и угловой скорости; по углу, угловой скорости и угловому ускорению; по углу, угловой скорости и интегралу от угла; и по типу обратной связи в рулевом приводе АП: жесткая обратная связь; скоростная обратная связь; изодромная обратная связь.
В исследуемом автопилоте используется скоростная обратная связь с датчиками по углу, угловой скорости и угловому ускорению.
6. Синтез структурной схемы системы управления автопилотом.
Смоделируем структурную схему разомкнутой системы «ЛА-АП» в программе Simulink (рисунок 8):
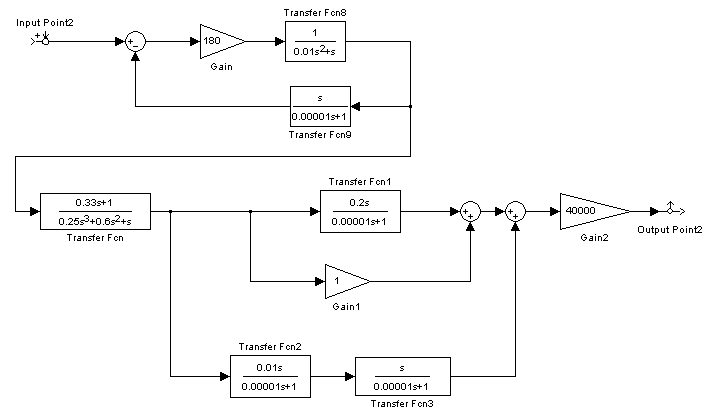
Рисунок 8. Структурная схема разомкнутой системы «ЛА-АП».
При исследовании разомкнутой системы «ЛА-АП» были выбраны следующие значения коэффициентов:
Коэффициент передачи гироскопа Кг=1; коэффициент передачи ГТ Кгт=0.2; коэффициент передачи ГТА Кгта=0.01; общий коэффициент передачи К=40000.
Приведём ЛАФЧХ разомкнутой системы «ЛА-АП» (рисунок 9):
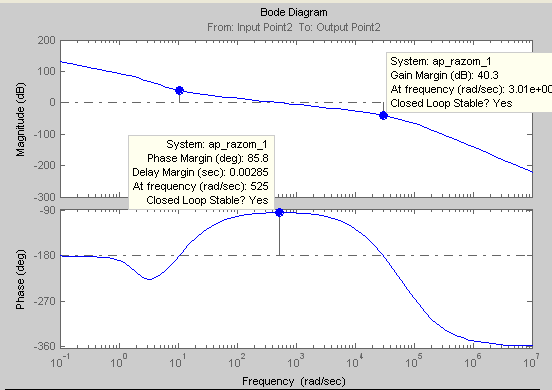
Рисунок 9. ЛАФЧХ разомкнутой системы «ЛА-АП».
Из ЛАФЧХ разомкнутой системы «ЛА-АП» видно, что система является устойчивой с запасом по амплитуде 40.3 дБ и запасом по фазе 85.8 град.
Составим структурную схему замкнутой системы «ЛА-АП» по отношению к управляющему воздействию (рисунок 10):
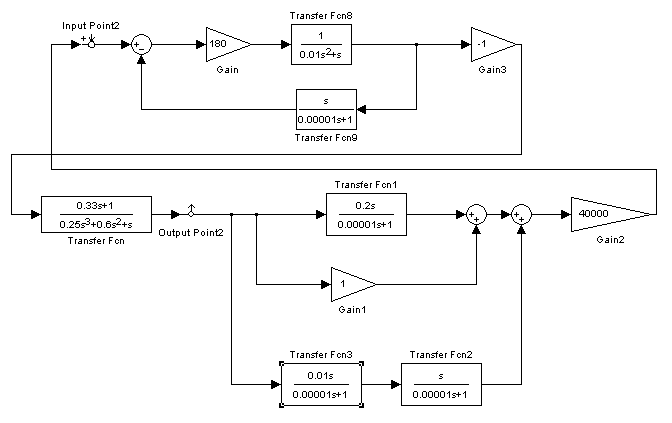
Рисунок 10. Структурная схема замкнутой системы «ЛА-АП» по управляющему воздействию.
Приведём ЛАФЧХ замкнутой системы по отношению к управляющему воздействию (рисунок 11):
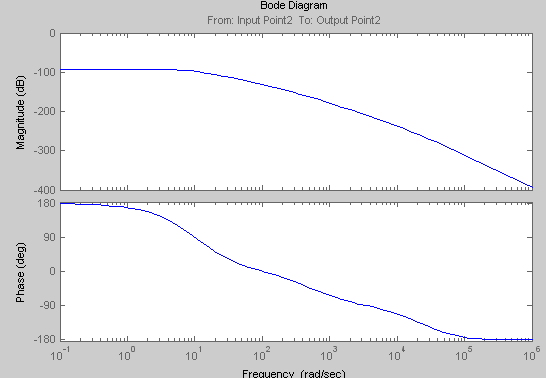
Рисунок 11. ЛАФЧХ замкнутой системы «ЛА-АП» по управляющему воздействию.
Переходный процесс замкнутой системы «ЛА-АП» с учетом управляющего воздействия (рисунок 12):
Амплитуда, рад

Рисунок 11. График переходного процесса замкнутой системы «ЛА-АП» с учетом управляющего воздействия.
Время переходного процесса: tпп=0.8с.
Составим структурную схему замкнутой системы «ЛА-АП» с учетом возмущающего воздействия (рисунок 12):
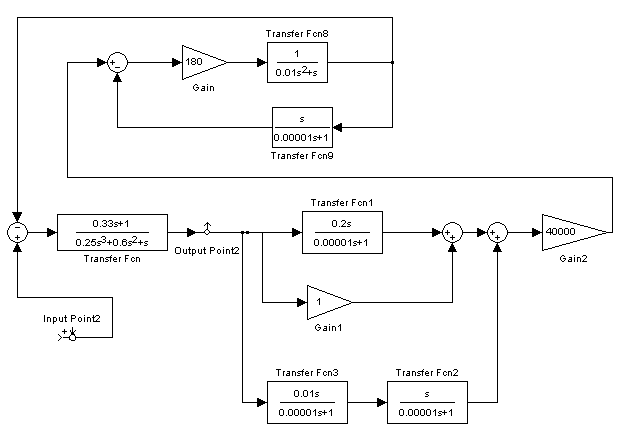
Рисунок 12. Структурная схема замкнутой системы «ЛА-АП» с учетом возмущающего воздействия.
Приведем ЛАФЧХ замкнутой системы «ЛА-АП» по возмущающему воздействию (рисунок 13):
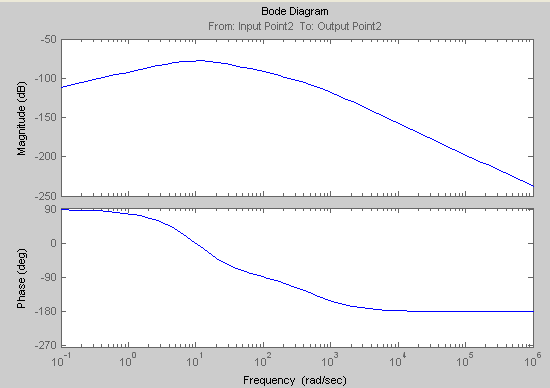
Рисунок 13. ЛАФЧХ замкнутой системы «ЛА-АП» по отношению к возмущающему воздействию.
Переходный процесс замкнутой системы «ЛА-АП» по возмущающему воздействию имеет вид (рисунок 14):
Амплитуда, рад
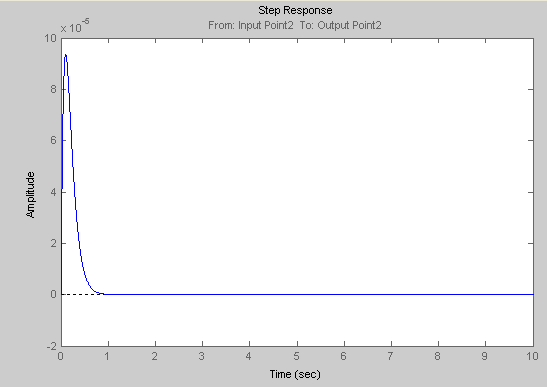
Рисунок 14. График переходного процесса замкнутой системы «ЛА-АП» по возмущающему воздействию.
Время переходного процесса: tпп=0.8 с.