

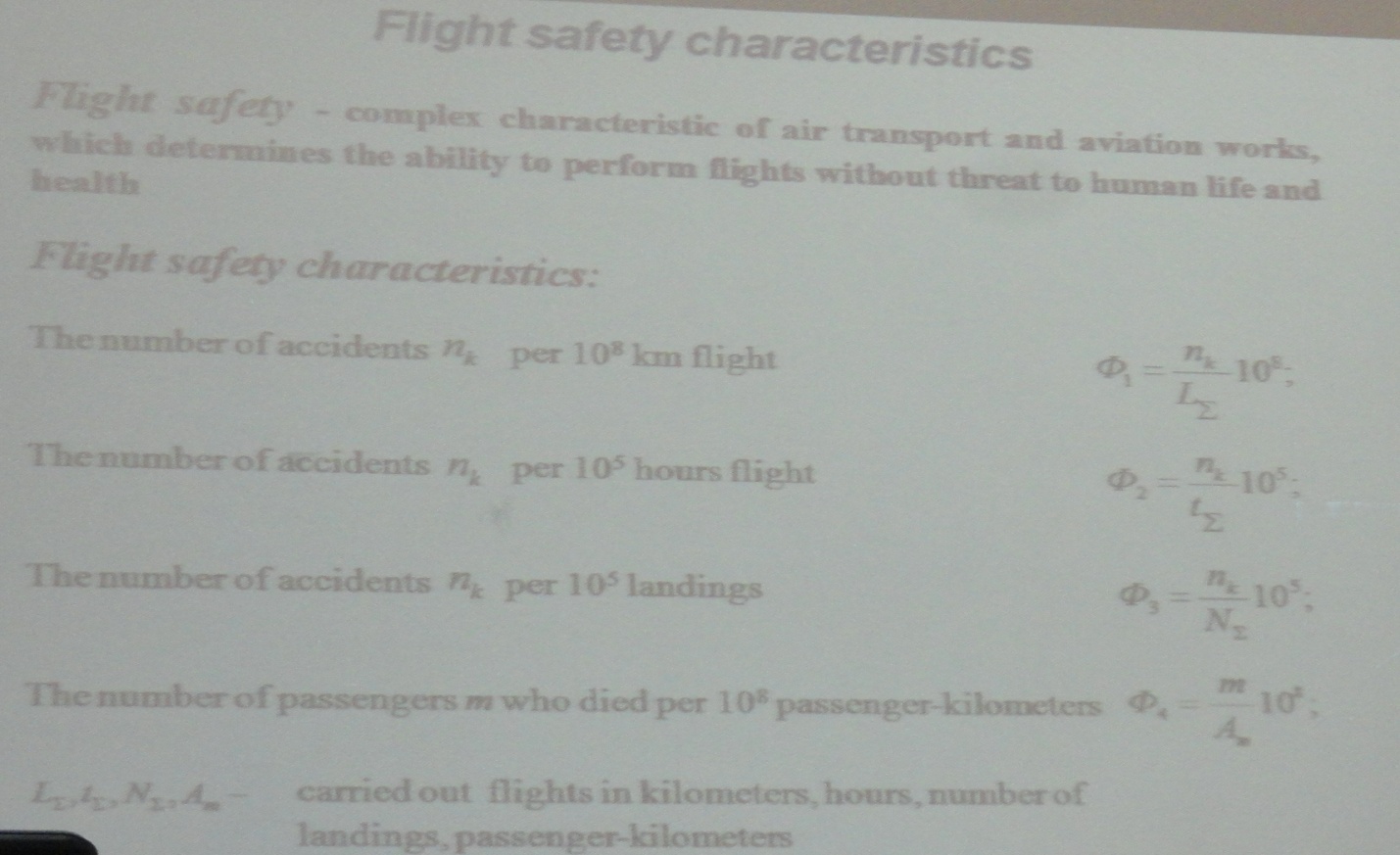
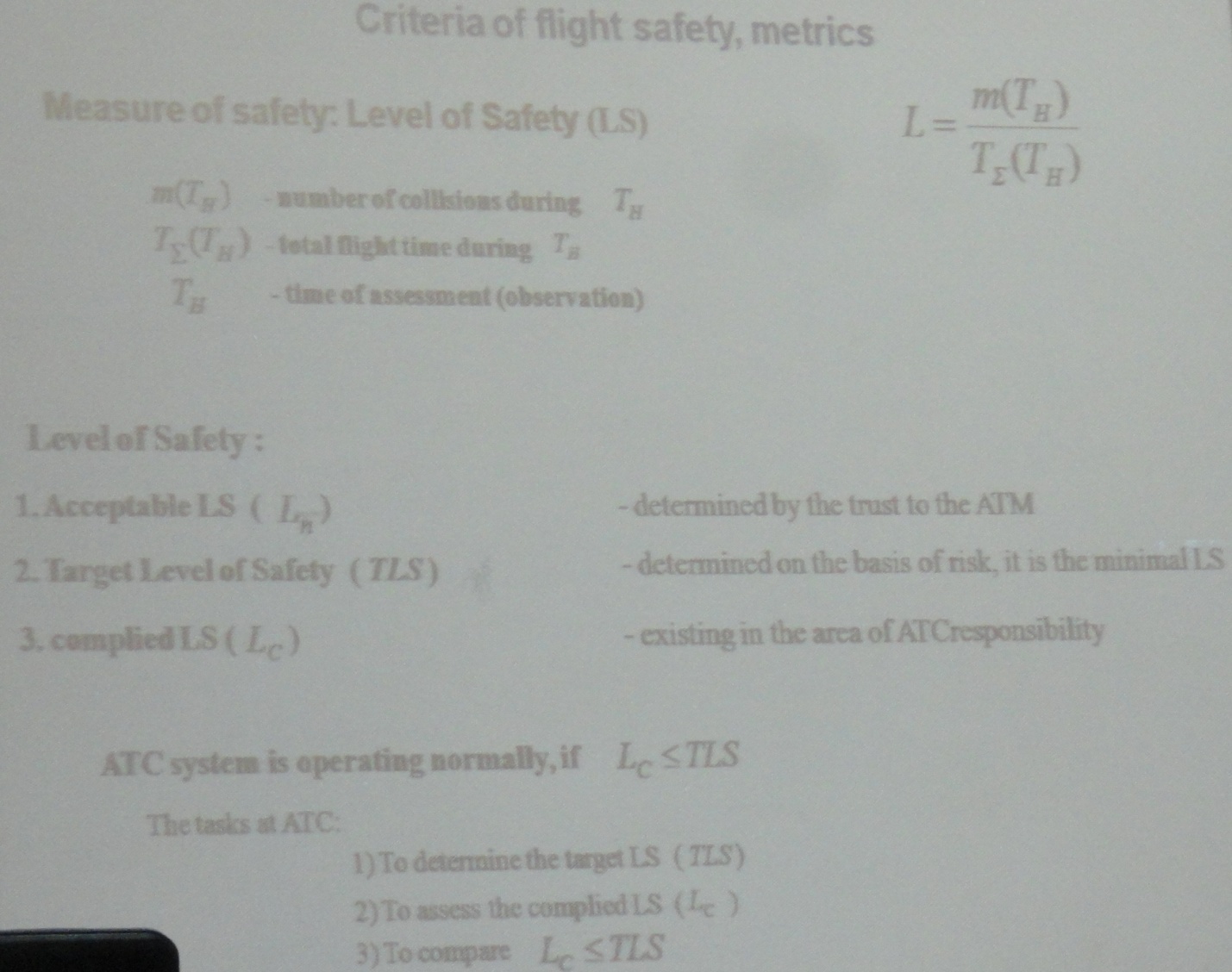
1. Показники безпеки польоту. Критерії безпеки, метрики.
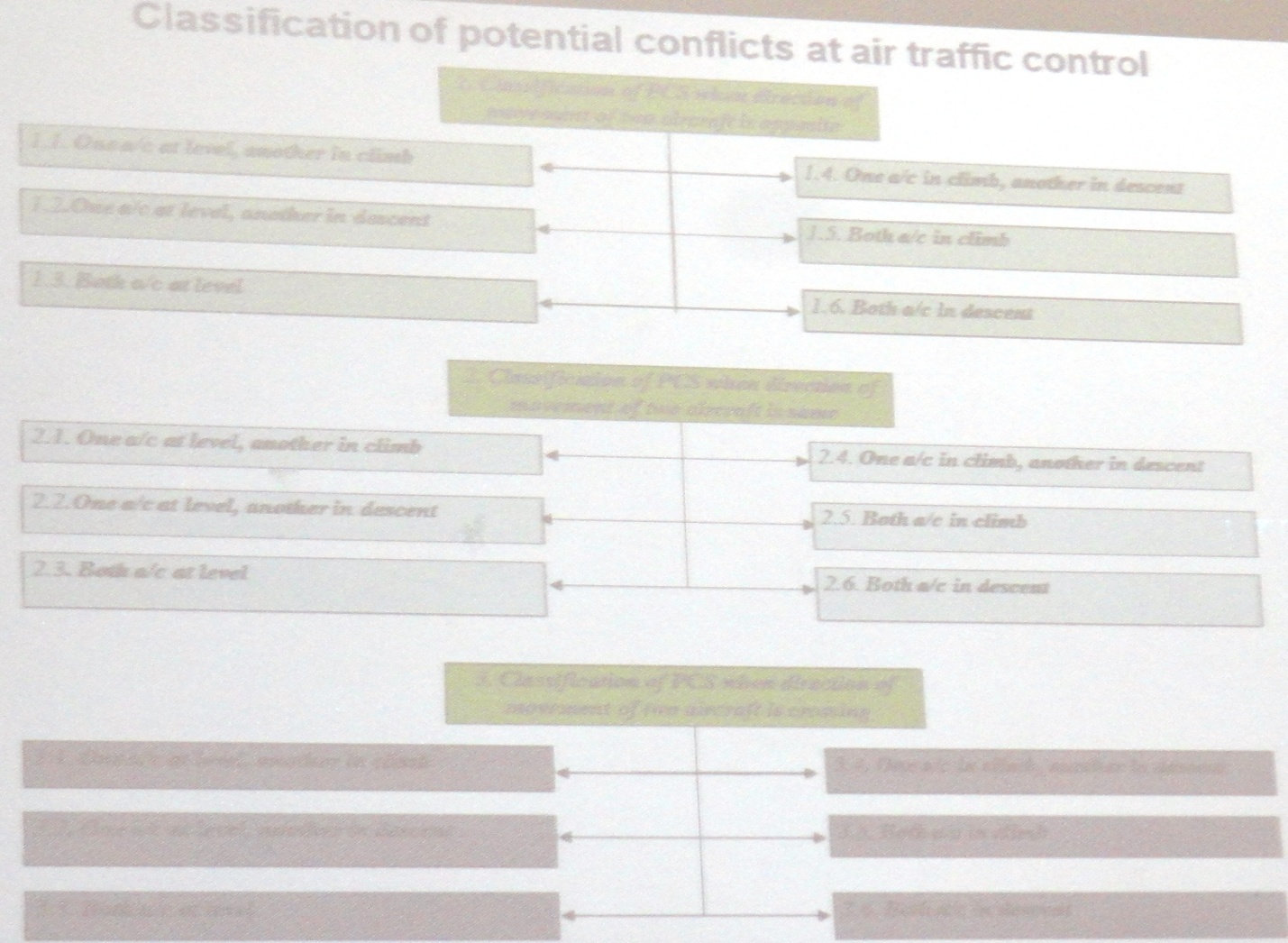
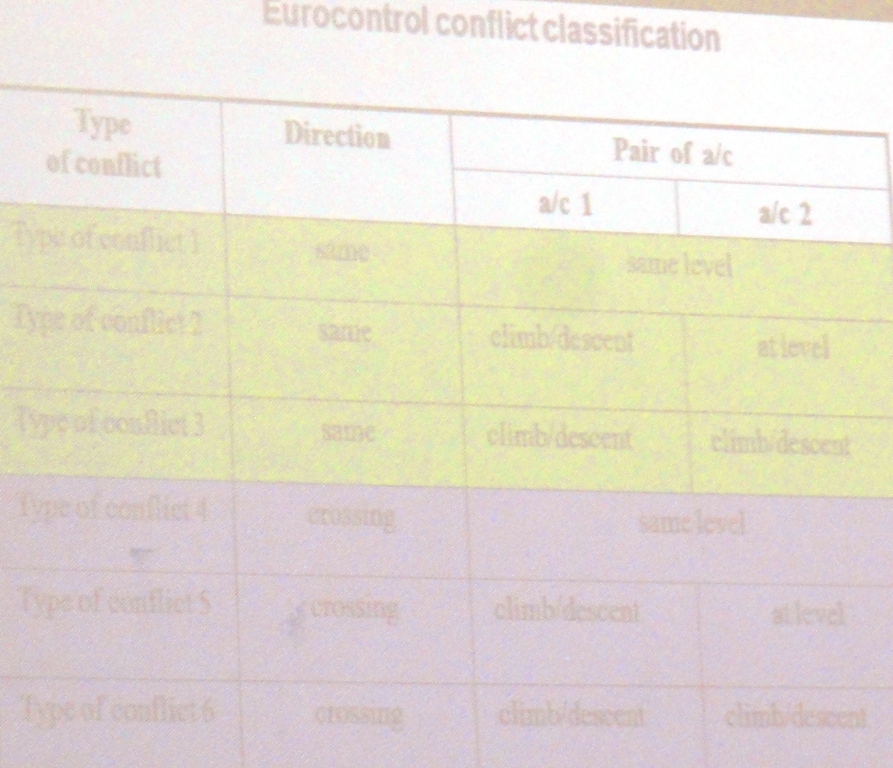
2. Класифікація ПКС при КПР.
Classification of flight situations.
The main situations in air traffic environment:
S1- typical(standard)
S2- complicated
S3- difficult
S4 – emergency
S5 – conflict
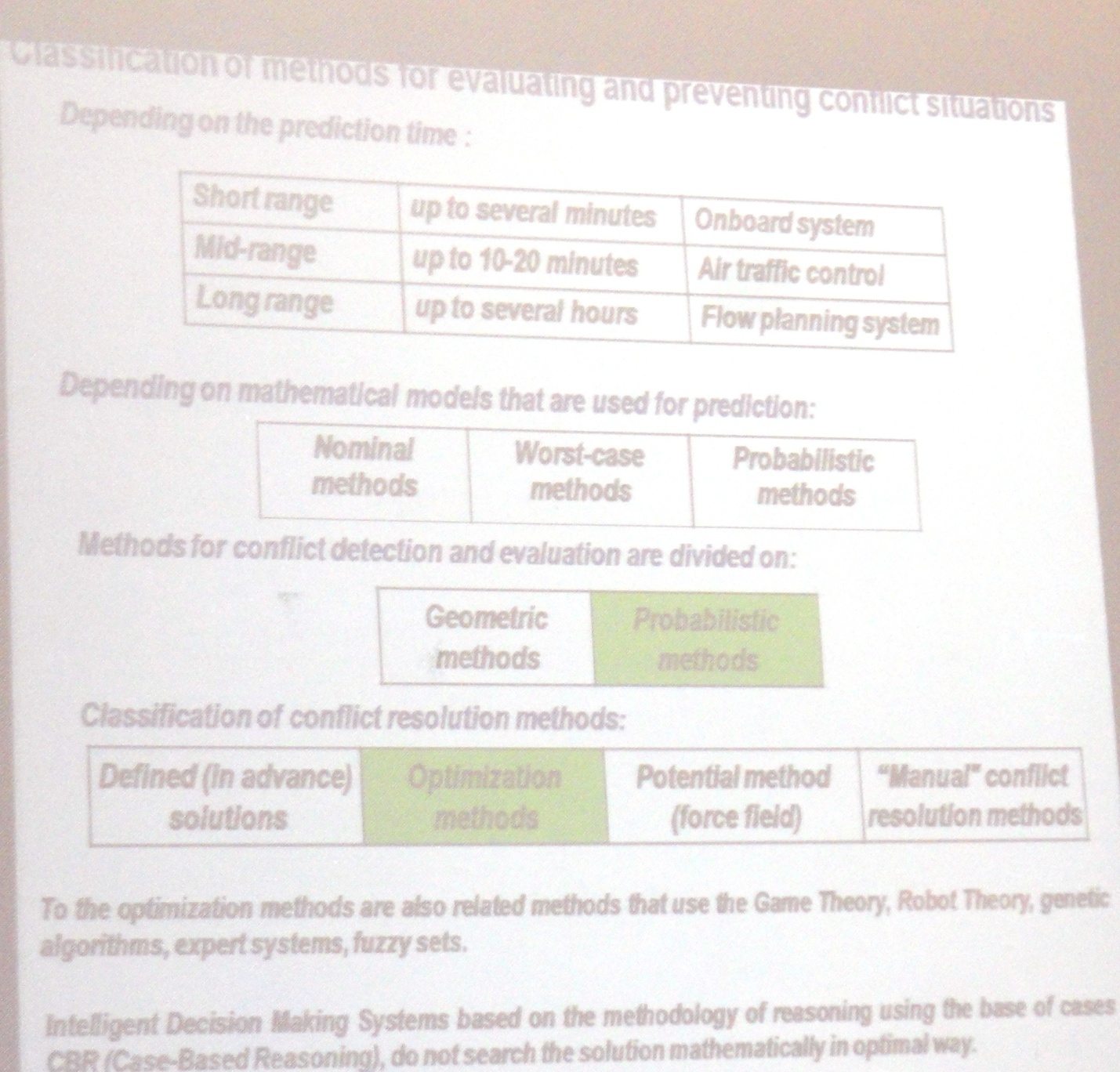
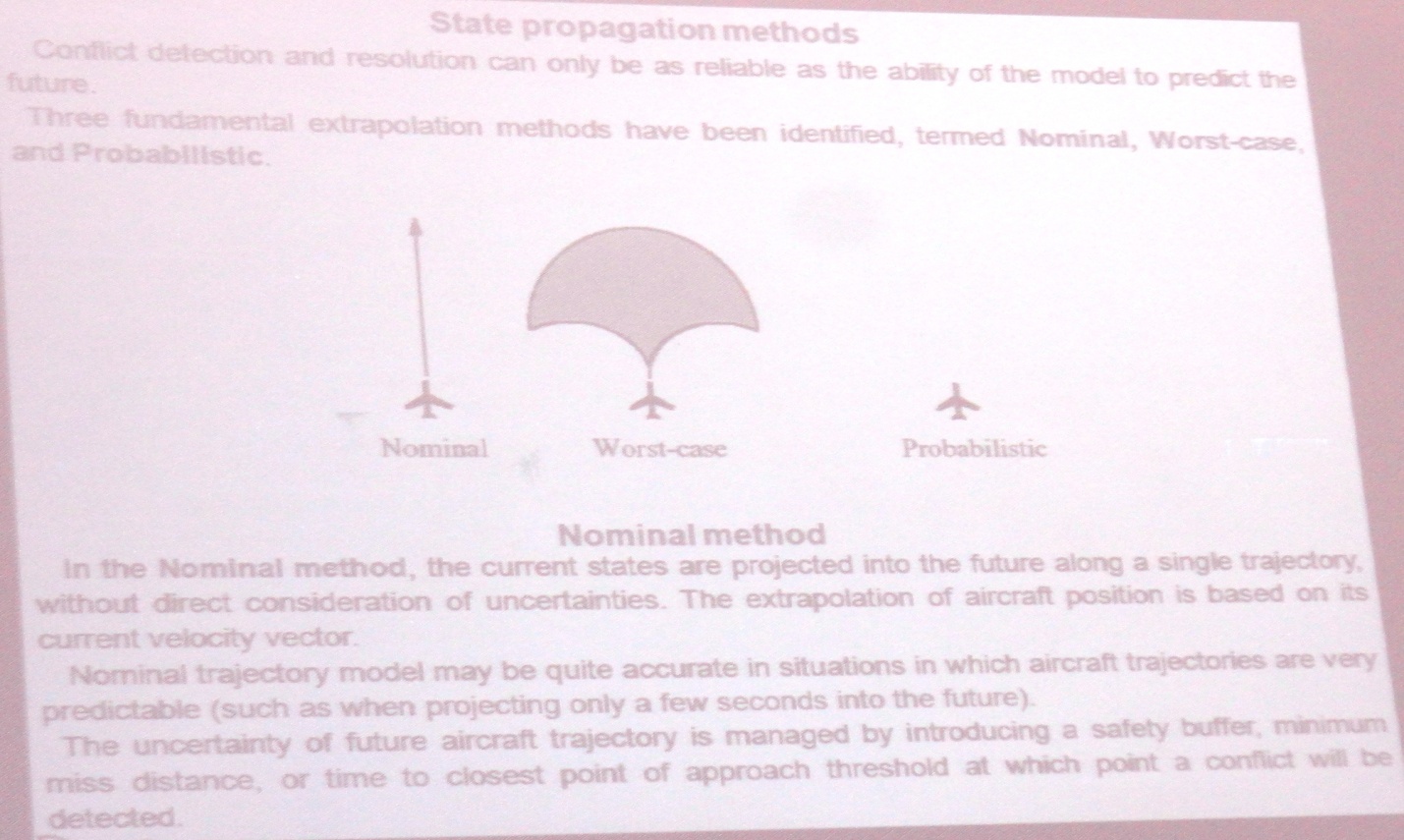
3. Класифікація методів виявлення, оцінки й запобігання конфліктних ситуацій.
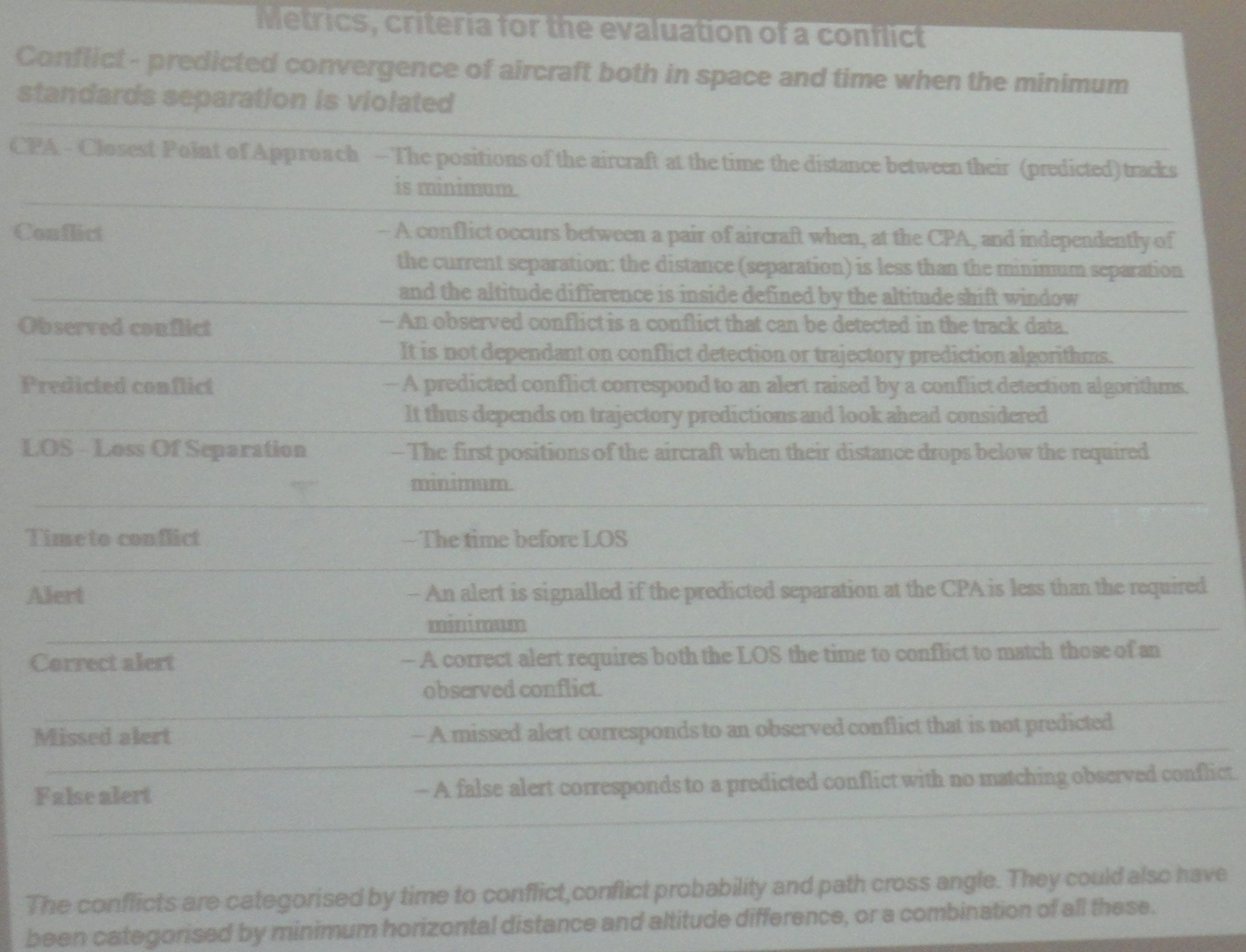
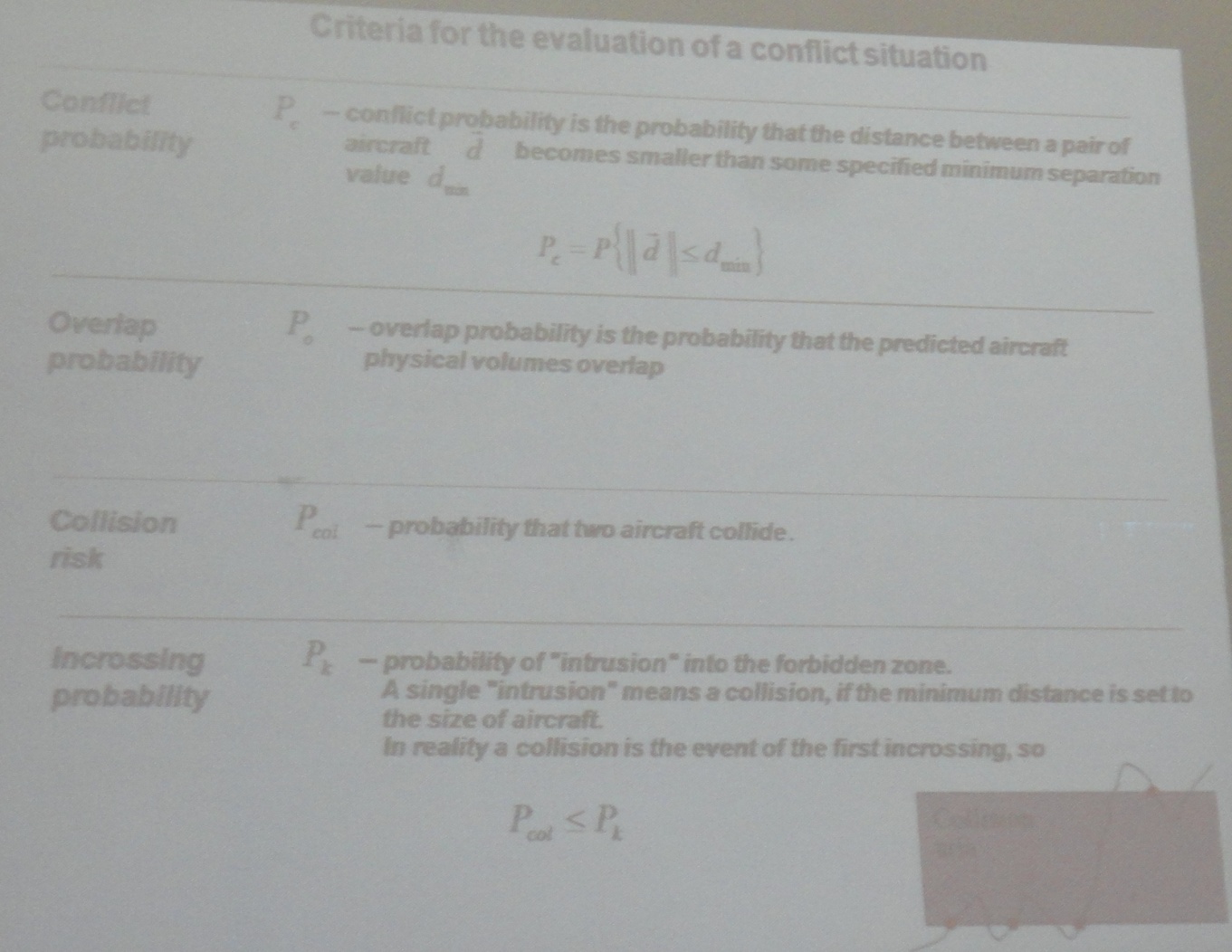
4. Критерії оцінки конфліктних ситуацій.
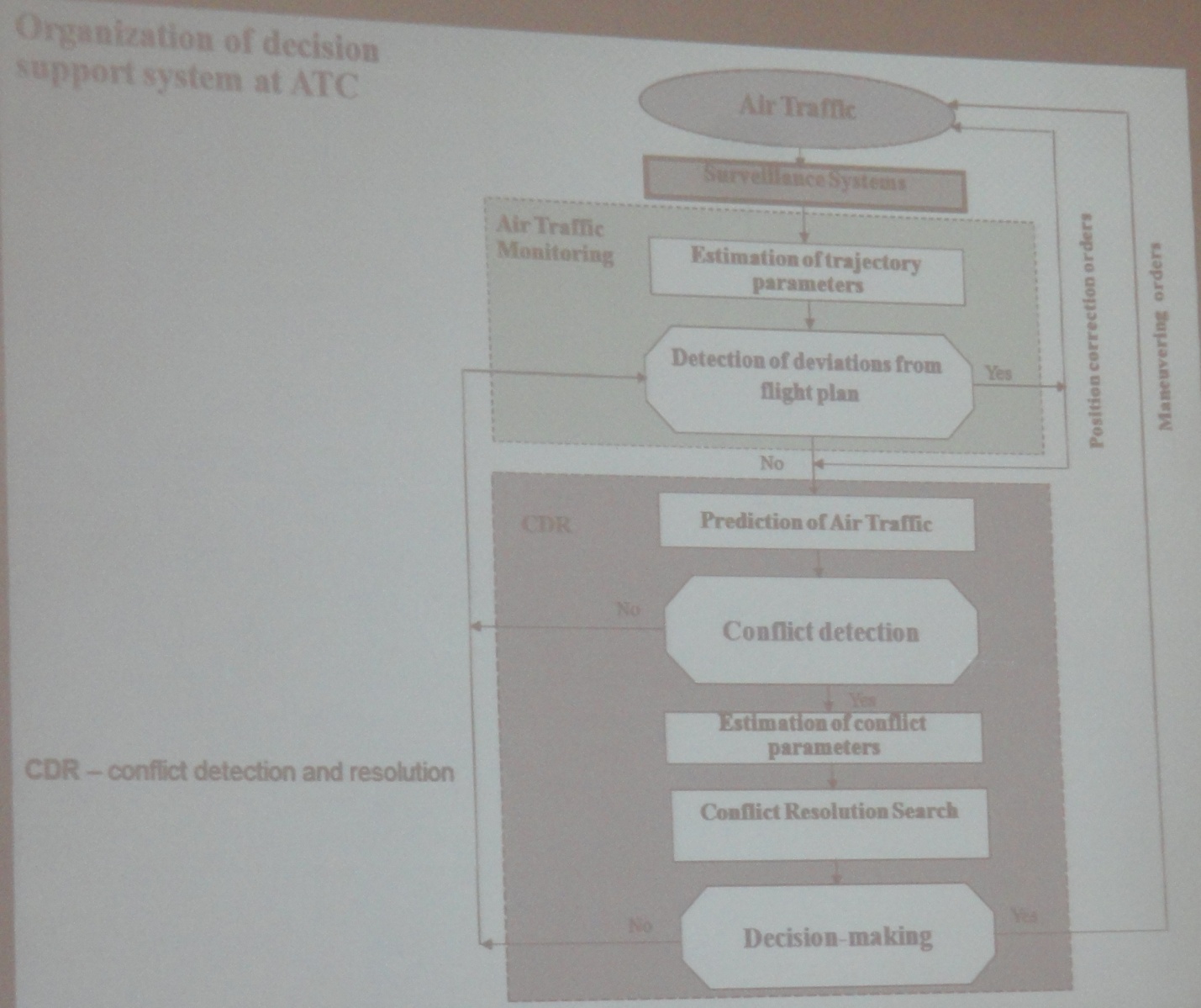
5. Організація і функції системи підтримки прийняття рішення для КПР
6. Автоматизація прийняття рішень в системі КПР

7. Завдання і функції МОНА
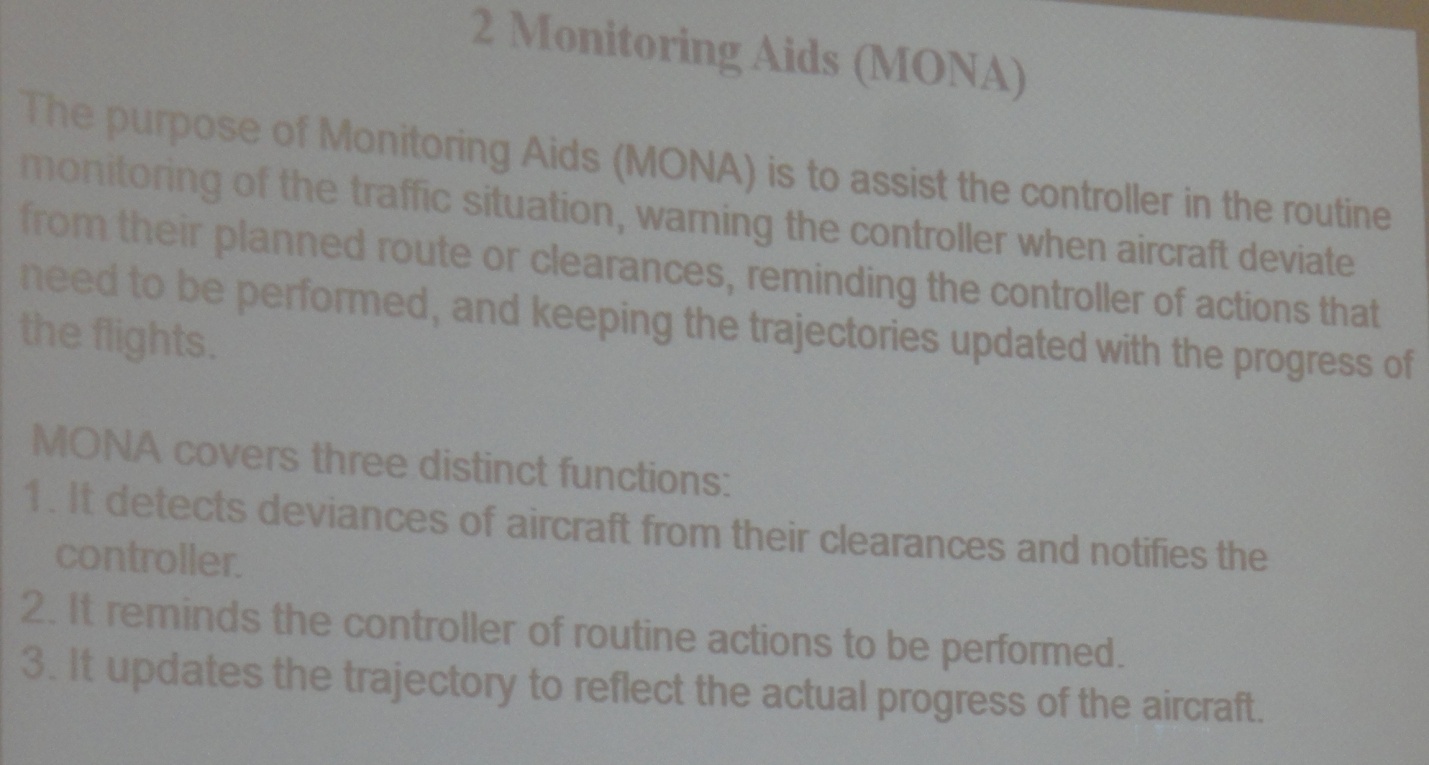
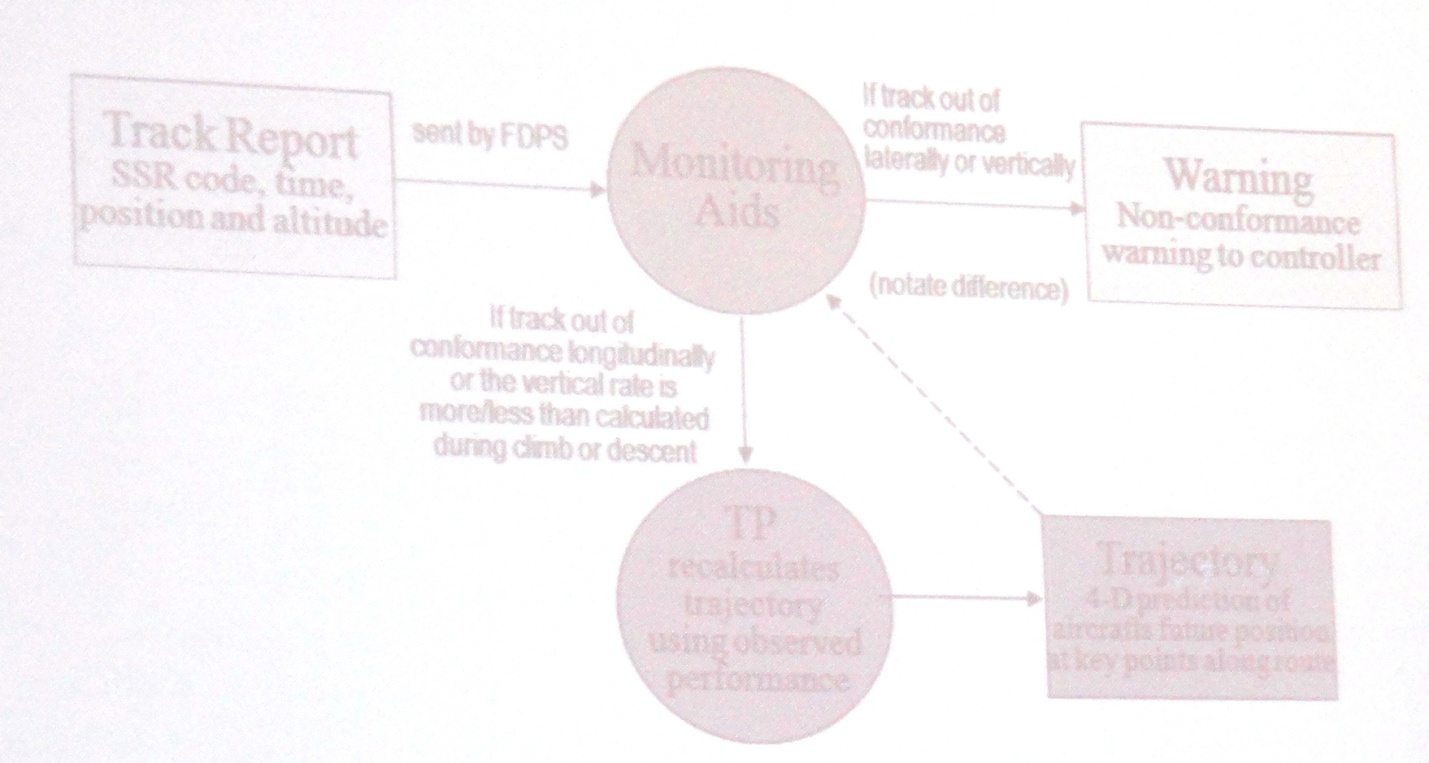
The monitoring aids provide a diverse set of functions derived from the comparison of the aircraft state vector against the trajectory and clearances for the purpose of:
Increasing the accuracy of the trajectory;
Warning the controller of deviation from the current clearance;
Reminding the controller of clearances to be issued.
MONA has several functions:
detection of deviations
triggering trajectory recalculation
providing warnings
providing reminders
Track - Trajectory Deviation
If MONA detects that the aircraft’s actual and predicted positions differ by more than a system parameter, then MONA will take appropriate action as follows:
alert the controller if the aircraft deviates from the route laterally
alert the controller if the aircraft leaves it’s assigned level during the cruise phase
alert controller for level bust
alert the controller if an aircraft levels off at an incorrect level
trigger recalculation of the trajectory for longitudinal deviations (i.e. the aircraft is
faster/slower than predicted)
trigger recalculation of the trajectory if the aircraft is climbing/descending at a different rate than predicted (during climb/descent phases)
8. Концепція застосування МОНА

9. Схема контролю відхилень у системі МОНА
10. Функція нагадувань у системі МОНА
11. Система попередження зіткнень літаків, «тау» критерій
Одна з головних задач диспетчера УПР – забезпечити дотримання норм ешелонування для кожного учасника повітряного руху. Норми ешелонування можна представити геометрично у вигляді захисного об'єму, побудованого навколо повітряного судна, параметрами якого є діючі в даній зоні відповідальності норми ешелонування для кожного ПС (вертикальне і подовжнє). Тоді конфліктна ситуація визначається як влучення в захисний об'єм контрольованого повітряного судна інших учасників повітряного руху.
Велике значення в системах запобігання конфліктів (Collision Avoidance System - CAS) має вибір критерію виявлення конфлікту. Широко відомою є концепція попередження часу – "тау" критерій, що характеризує час, що залишається до максимального зближення літаків. В основі лежить визначення найменшої відстані між двома конфліктуючими літаками (Closest Point of Approach – CPA). Знаючи CPA визначається місце, де прогнозується мінімальна відстань, і час польоту, що залишився до цієї точки.
В автоматизований системах керування повітряним рухом застосовуються алгоритми попередження конфліктів, що мають декілька тестів перевірки можливості появи конфліктів. При цьому тести розробляються з урахуванням мінімізації часу обчислення і таким чином, щоб результати кожного тесту використовувалися у наступних тестах.
На
практиці виявлення повинне здійснюватися
задовго до моменту реально можливого
зіткнення, у цьому випадку
 і час до найбільшого зближення
і час до найбільшого зближення
 обчислюється, використовуючи апроксимацію
обчислюється, використовуючи апроксимацію
 . (10.5)
. (10.5)
При
цьому різниця між часом
і
 установлюється виразом
установлюється виразом
 або
або
 .
.
Простим часовим критерієм виявлення небезпечного зближення літаків є так називаний "тау" критерій для (10.5), коли умовою виявлення погрози небезпечного зближення є виконання нерівності
 , (10.6)
, (10.6)
де
 – заданий час, необхідний для виконання
маневру запобігання зіткнення.
– заданий час, необхідний для виконання
маневру запобігання зіткнення.
Недоліком
"тау"
критерію є
те, що в більшості випадків
 ,
і, отже, по мірі наближення до точки
найбільшого зближення виникає помилка,
що тим більше, чим більше
,
і, отже, по мірі наближення до точки
найбільшого зближення виникає помилка,
що тим більше, чим більше
 .
.
Інший недолік критерію виявляється при повільному зближенні літаків, коли згідно (10.5), (10.6) спрацьовує сигналізація загрози, у той час як безпечна відстань між літаками забезпечено.
Для
усунення зазначених недоліків розроблені
модифікації "тау"
критерію,
де вводиться поріг спрацьовування по
дальності
 ,
що залежить від рівня чутливості.
Модифікований критерій записується
,
що залежить від рівня чутливості.
Модифікований критерій записується
 (10.7)
(10.7)
Для
того, щоб забезпечити своєчасне виявлення
небезпечного зближення в тому випадку,
якщо літак, що загрожує, летить з постійним
прискоренням
 ,
необхідно мати додатковий запас по
відстані
,
необхідно мати додатковий запас по
відстані
 .
Модифікований критерій (10.7) по суті
враховує прискорення, рівне
.
Модифікований критерій (10.7) по суті
враховує прискорення, рівне
 .
.
12. Tcas. Призначення, функції, принцип дії.
ТCAS функціонує автономно і незалежно від будь-якого бортового навігаційного устаткування і наземних систем. У процесі обробки TCAS безупинно «спостерігає» за повітряним простором навколо літака, на якому цю систему встановлено, роблячи активні запити і приймаючи відповіді на ці запити від відповідачів інших літаків, що можуть являти собою загрозу.
Робота TCAS ІІ ґрунтується на двох основних принципах:
час попередження, що ґрунтується на часі польоту до точки найбільшого зближення (СРА)
рівень чутливості, що є функцією від висоти і визначає рівень захисту через установлення більш високих граничних величин для вищих діапазонів висот.
Навколо літака формується «захищений обєм» повітряного простору – «зона зіткнення», покликана захистити літак від вторгнення в неї інших літаків. Якщо прогнозується таке вторгнення, то екіпаж інформують про це засоби візуального і мовного оповіщення.
Оскільки систему побудовано за принципом обчислення часу до можливого зіткнення, то розміри і форма зон автоматично змінюються залежно від швидкості зближення з конфліктуючим літаком, взаємного напрямку руху і висоти польоту: tTA = 20-48c, tRA = 15-35 c, LTA = 3,3 mile, LRA=2,1mile, L=20mile.
13. Элементы tcas II и их назначение
TCAS II состоит из следующих основных элементов:
- компьютер - выполняет наблюдение за воздушным пространством, отслеживает воздушные суда-нарушители, определяет угрожающие воздушные суда, рассчитывает условия маневра по устранению угрозы столкновения и генерирует сигналы для выдачи рекомендаций;
- пульт управления TCAS, соединенный с приемоответчиком. Это - трехпозиционный переключатель, который может быть установлен в одно из положений:
“Режим ожидания”: TCAS выключена;
“Только TA”: могут выдаваться только сигналы ТА;
“Автоматический” или “TA/RA”: нормальная работа TCAS;
- две антенны: одна антенна установлена в верхней, вторая антенна - в нижней части фюзеляжа. Верхняя антенна направленного действия используется для повышения качества слежения за воздушными судами-нарушителями. Эти антенны отделены от антенн приемоответчика. Сигналы-запросы передаются на частоте 1030 МГц, а сигналы-ответы принимаются на частоте 1090 Мгц. Эти же самые частоты используются вторичными обзорными радиолокаторами. Работа TCAS взаимосвязана с работой приемоответчика для того, чтобы избежать слежения за собственным воздушным судном;
- связь с приемоответчиком, работающим в режиме S, предназначена для выдачи дополнительных и скоординированных рекомендаций между воздушными судами, когда они оба оборудованы TCAS;
- связь с высотомером предназначена для получения данных о барометрической высоте полета воздушного судна;
- связь с радиовысотомером предназначена для задержки выдачи RA, когда воздушное судно находится в непосредственной близости от земли, и для определения, не находятся ли воздушные суда, которые отслеживаются TCAS, на земле;
- динамики предназначены для выдачи звуковых сообщений;
- дисплеи предназначены для воспроизведения соответствующих данных.
Дополнительно учитываются и другие данные, которые касаются летно-технических характеристик воздушного судна. Это положение шасси и закрылков, практический потолок воздушного судна и т.п.
Тем не менее TCAS II не соединяется ни с автопилотом, ни с FMS. TCAS II остается независимой и будет продолжать выполнять свои функции в случае отказа любой из этих систем.
