

48. Мышь: назначение, принцип действия механической мыши, состав основных узлов.
49. Назначение контроллера и драйвера мыши. Мыши.
Идея перемещения курсора с помощью мы была впервые высказана в 1968 году на одной из конференций по вычислительной технике, проходившей в Сан–Франциско. До того неизвестный ученый Энжельбард продемонстрировал новый метод общения с компьютером. Для этого он использовал небольшую коробочку, катавшуюся на колесиках, с дополнительной клавиатурой. На ней было две кнопки и проводник, связывавший мышь с компьютером .
Современные мыши устроены несколько иначе. Наиболее распространена мышь с механическим контактом с поверхностью (рисунок).
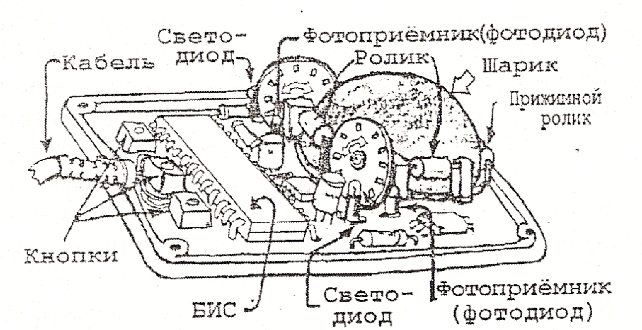
Рисунок.
В этой мыши с поверхностью соприкасается тяжелый обрезиненный или сделанный из твердой резины шарик. К поверхности шарика прижимаются валики с датчиками, с помощью которых определяются направление и скорость перемещения мыши. Преобразованный в электрический сигнал, сигнал перемещения передается в контроллер мыши. В нем сигналы обрабатываются и кодируются и затем передаются в компьютер. В компьютере сигналы декодируются, обрабатываются драйвером мыши, в результате получаются сигналы управления курсором.
Чаще всего в мышах применяются бесконтактные датчики, которые представляют собой пару светодиод и фотодиод, расположенных по разные стороны от диска с прорезями. Порядок, в котором освещаются фоточувствительные элементы, определяет направление перемещения мыши, а частота приходящих импульсов – скорость перемещения.
47. Что такое «дребезг» контактов», как аппаратно решается борьба с этим явлением.
Схема управления (СУ).
Основная функция СУ – сформировать код, соответствующий нажатой клавише. Кодирование обычно проводится в соответствии с DKOI или KOU-7. Структурная схема представлена на рис. 5.2:
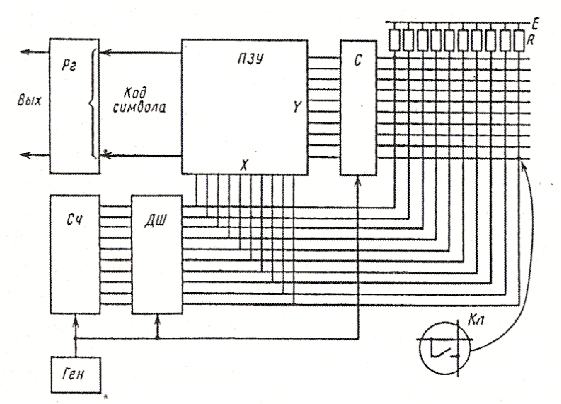
Рис. 5.2
Нажатие клавиши изменяет логическое состояние ключа из логического нуля в логическую единицу. Однако этот переход совершается не мгновенно и сопровождается повторными срабатываниями, так называемым “дребезгом” контактов. СУ с помощью селектора С устраняет влияние “дребезга” контактов. В противном случае может формироваться последовательность одинаковых кодов неопределенной длины.
В СУ имеется генератор тактовых импульсов (Ген), а также счетчик (Сч) и дешифратор (ДШ). В схеме происходит опрос состояния ключей, расположенных в столбцах Х-матрицы клавиатуры. При нажатии клавиши сигнал через замкнутый контакт поступает в соответствующую горизонтальную шину Y-матрицы и затем, через селектор С, поступает на вход ПЗУ ввиде адресного кода. В ячейках ПЗУ записаны коды символов, а точнее, их младшие разряды, которые выдаются в Рг (регистр) по заднему фронту тактового импульса. Старшие разряды кода определяются содержимым специального регистра (т.к. количество клавиш меньше полного набора символов алфавита. Эти специальные клавиши управляют клавиатурой). Значение этих старших разрядов остается неизменным до перехода к другому регистру клавиатуры, т.е. до следующего нажатия клавиши – переключения регистров.
Последнее время для управления клавиатурой обычно используются микропроцессорные комплекты, которые позволяют упростить аппаратуру кодирования, а также существенно уменьшить “дребезг” контактов. Пример реализации приведен на рис. 5.3, а описание работы схемы (и, собственно, рис. 5.3) – в книге Ларионова и Горнеца “Периферийные устройства”.