36.Промышленные сети и интерфейсы:
ControlNet
CONTROLNET:
промышленная шина для ответственных
систем высокого уровня
|
Методы обмена
сообщениями: на базе модели
"производитель/потребитель"
(Producer/Consumer); обмен с поддержкой
нескольких главных устройств, обмен
между одноранговыми устройствами,
фрагментированные сообщения,
сообщения с приоритетом и расписанием
повторных передач; сдвоенные каналы
передачи (встроенное резервирование).
|
Типичные
области применения: ответственные
общезаводские сети, объединяющие
персональные компьютеры, программируемые
контроллеры, подсети (DeviceNet, Foundation
Fieldbus Н1 и т.п.) и средства автоматизации
технологических процессов. Шина
ControlNet используется также для
высокоскоростной передачи
чувствительных ко времени данных
ввода/вывода, обычных сообщений,
для загрузки/выгрузки программирующих
и конфигурирующих параметров, а
также для обмена сообщениями между
одноранговыми устройствами.
|
Достоинства:
детерминированное, стабильное,
рациональное использование пропускной
способности; более дешёвое, чем в
большинстве других сетей, включая
Ethernet, резервирование. Данные могут
передаваться по любому транспортному
межсетевому протоколу через Ethernet,
Firewire и USB.
|
Технология ControlNet задумывалась как
объединяющая промышленная шина
верхнего уровня, удовлетворяющая
многим требованиям высокопроизводительных
средств автоматизации и управления
технологическими процессами.
Требованием первостепенной важности
является обеспечение взаимодействия
устройств со 100-процентным детерминизмом
и меньшим по сравнению с традиционными
сетями (связи типа "главный-подчиненный",
с методом опроса и избирательным
методом обмена сообщениями) временем
отклика. (Детерминизм означает знание
времени отклика со 100-процентной
определенностью в самых неблагоприятных
условиях). Данное требование
реализуется за счет применения
коммуникационной модели типа
"производитель/потребитель" и
планировщика со строгими приоритетами
сообщений.
|
В сетях ControlNet одни и те же точки
ввода/вывода могут контролироваться
несколькими главными устройствами.
|
Неотъемлемой характеристикой
ControlNet является дублирование
соединений. В других сетях обеспечить
резервирование довольно трудно, в
то время как в ControlNet парные соединения
для этой цели имеет каждый узел.
|
Стабильность (repeatability) означает, что
длительность передачи постоянна по
величине и не зависит от подключения
устройств к сети или их отключения.
В ControlNet эти характеристики были еще
более усовершенствованы за счет
выбираемых пользователем функций
ввода/вывода и времен обновления
блокировок контроллера. Технология
ControlNet специально разрабатывалась
для поддержки информационно-управляющих
потоков в системах, состоящих из
десятков (в полном смысле этого
слова) подсетей и контроллеров. Для
систем, имеющих дело с опасными
материалами и требующих абсолютной
гарантии передачи управляющей
информации, детерминированные
характеристики ControlNet чрезвычайно
важны.
|
|
Средства автоматизации управления
электроприводом
Электроприводы
(сервоприводы) находят широкое
применение в промышленном производстве
при автоматизации технологических
процессов. Применение электроприводов
позволяет быстрее и точнее
позиционировать инструмент или
обрабатываемую деталь, точно задавать
скорость перемещения управляемого
механизма. Классическим примером
применения электропривода является
система позиционирования станины
фрезерного станка.
Два
подхода в применении электроприводов:
Системы
с обратной связью: Параметры
подаваемого на электродвигатель
управляющего сигнала определяются
разницей между заданной величиной
контролируемого параметра (координата,
скорость) и его фактическим значением,
определяемым с помощью датчиков
перемещения (энкодеров).
Электроприводы
на основе шаговых двигателей, в
которых величина перемещения объекта
и его координата определяются
количеством управляющих импульсов,
поданных на шаговый двигатель. Для
функционирования системы энкодеры
не требуются, необходимы лишь
дискретные (например, контактные)
сигнализаторы положения: датчик
начала отсчёта и датчики ограничения
хода механизма.
Разновидности
датчиков положения
Существует
много разнообразных датчиков
положения, различающихся конструкцией
и электрическим интерфейсом.
Наибольшей популярностью пользуются
вращательные датчики, которые в свою
очередь бывают двух типов: абсолютные
(выдаёт уникальный код для каждой
позиции вала) и относительные
(в процессе вращения периодически
формируют импульсы, соответствующие
угловому положению вала). Относительные
датчики часто называют инкрементными
или импульсными. Они определяют
положение только относительно
номинальной позиции. В системах на
основе инкрементных датчиков после
каждого включения необходимо
перемещать механические части машины
на стартовую позицию. Абсолютный
энкодер при появлении питания сразу
выдаст фактическое угловое положение
вала. Однако в силу своей простоты
и универсальности относительные
датчики дешевле.
Сигнал
относительного энкодера преобразуется
в величину перемещения с помощью
счётчика импульсов. Для определения
направления движения приходится
использовать дополнительный сигнал,
при этом информация о направлении
может кодироваться разными способами:
CW/CWW
(по часовой стрелке / против часовой
стрелки): первый сигнал — импульсы
перемещения в одном направлении,
второй - импульсы перемещения в
обратном направлении;
квадратурная
кодировка (наиболее прост и надёжен
в реализации): оба сигнала - импульсы
перемещения, сдвинутые по фазе на
90 град., знак фазового сдвига
определяет направление перемещения.
Способ
квадратурной кодировки наиболее
прост и надёжен. Иногда используется
ещё и третий опорный дискретный
сигнал для регистрации начальной
позиции (указатель нулевой отметки).
Электроприводы
на основе шаговых двигателей
Шаговые
двигатели выполняют, в сущности,
обратную по сравнению с относительными
энкодерами функцию. Каждый входной
импульс преобразуется ими в
элементарное перемещение строго
определённой величины. Поэтому
системы на основе шаговых двигателей
могут обходиться без датчиков
перемещения как таковых, что предельно
упрощает систему. Энкодеры в этих
системах могут использоваться как
средство объективного контроля.
Линейная
и круговая интерполяция
При
управлении многокоординатными
системами часто возникают необходимость
переместить управляемый объект по
произвольной прямолинейной или
круговой траектории (соответственно
линейная и круговая интерполяция).
Реализация данных алгоритмов требует
ощутимых вычислительных затрат.
Поэтому модули управления
многокоординатными системами на
основе шаговых двигателей снабжаются
собственным процессором. Таким
образом, разгружается центральный
процессор компьютера или контроллера.
Устройства человеко-машинного
интерфейса
Человекомашинный интерфейс (ЧМИ)
(англ. Human machine interface, HMI) — широкое
понятие, охватывающее инженерные
решения, обеспечивающие взаимодействие
оператора с управляемыми им машинами.
Создание систем человекомашинного
интерфейса тесно связано с эргономикой,
но не тождественно ей. Проектирование
ЧМИ включает в себя создание рабочего
места: кресла, стола, или пульта
управления, размещение приборов и
органов управления, освещение
рабочего места, а, возможно, и
микроклимат. Далее рассматриваются
действия оператора с органами
управления, их доступность и
необходимые усилия, согласованность
(непротиворечивость) управляющих
воздействий и «защита от дурака»,
расположение дисплеев и размеры
надписей на них. Наиболее сложной
задачей является создание ЧМИ для
пилотов самолёта. В промышленных
условиях ЧМИ чаще всего реализуется
с использованием типовых средств:
операторских панелей, компьютеров
и типового программного обеспечения.
|
Человеко-машинный интерфейс
обеспечивает связь между
пользователем и компьютером - он
позволяет достигать поставленных
целей, успешно находить решение
поставленной задачи. Взаимодействие
- обмен действиями и реакциями на
эти действия между компьютером и
пользователем. Несколько лет назад
основным видом взаимодействия был
текст (так называемые терминальные
или коммандные системы). В настоящее
время, взаимодействие может также
включать графику и иконки (знаки)
вместо текста, но для описания
процесса взаимодействия все равно
еще используется текст. Имеется ряд
стилей взаимодействий, которые
делятся на два основных вида.
Первый – это использование интерфейса
языка команд - ввод команд текстовыми
средствами; и второй – это
непосредственное манипулирование.
Таким образом, имеется ряд способов,
которыми пользователь мог бы
связываться с компьютером:
команды в тестовом режиме;
отвечает ему (или наоборот);
необходимые поля;
выбирая необходимые пункты;
посредством устройства манипулирования,
типа мыши. Другой термин,
используемый для прямого интерфейса
манипулирования - Графический
В различных операционных системах
не сегодняшний день обычно
используются комбинированные стили
взаимодействия из приведенных
выше. Например, в графическом
интерфейсе операционной системы
Windows используется прямое
манипулирование, а также меню,
диалоговые элементы, формы и язык
команд. Такой подход важен для
проектировщика автоматизированных
систем, поскольку позволяет
тщательно рассмотреть поставленную
задачу заказчика (будущего
пользователя), чтобы выбрать
наилучший вариант решения задачи.
В разрабатываемой программной
системе также применен комплексный
подход к созданию интерфейса. Здесь
используется прямое манипулирование,
меню, формы и диалоги. По ходу
изложения материалы будут
представлены примеры из разрабатываемой
системы.
Цель создания эргономичного
интерфейса состоит в том, чтобы
отобразить информацию настолько
эффективно насколько это возможно
для человеческого восприятия и
структурировать отображение на
дисплее таким образом, чтобы
привлечь внимание к наиболее важным
единицам информации. Основная же
цель состоит в том, чтобы
минимизировать общую информацию
на экране представить только то,
что является необходимым для
пользователя.
Основные принципы создания интерфейса
1. Естественность (интуитивность)Работа
с системой не должна вызывать у
пользователя сложностей в поиске
необходимых директив (элементов
интерфейса) для управления
процессом решения поставленной
задачи.
2. Непротиворечивость. Если в процессе
работы с системой пользователем
были использованы некоторые приемы
работы с некоторой частью системы,
то в другой части системы приемы
работы должны быть идентичны. Также
работа с системой через интерфейс
должна соответствовать установленным,
привычным нормам (например,
использование клавиши Enter).
3. Неизбыточность. Это означает, что
пользователь должен вводить только
минимальную информацию для работы
или управления системой. Например,
пользователь не должен вводить
незначимые цифры (00010 вместо 10).
Аналогично, нельзя требовать от
пользователя ввести информацию,
которая была предварительно введена
или которая может быть автоматически
получена из системы. Желательно
использовать значения по умолчанию
где только возможно, чтобы
минимизировать процесс ввода
информации.
4. Непосредственный доступ к системе
помощи. В процессе работы необходимо,
чтобы система обеспечивала
пользователя необходимыми инструкциями.
Система помощи отвечает трем основным
аспектам -качество и количество
обеспечиваемых команд; характер
сообщений об ошибках и подтверждения
того, что система делает. Сообщения
об ошибках должны быть полезны и
понятны пользователю.
5. Гибкость.
Насколько хорошо интерфейс системы
может обслуживать пользователя
с различными уровнями подготовки?
Для неопытных пользователей интерфейс
может быть организован как
иерархическая структура меню, а
для опытных пользователей как
команды, комбинации нажатий клавиш
и параметры
|
|
Автоматизация технологических
процессов
Автоматизация технологического
процесса — совокупность методов
и средств, предназначенная для
реализации системы или систем,
позволяющих осуществлять управление
самим технологическим
процессом без непосредственного
участия человека, либо оставления
за человеком права принятия наиболее
ответственных решений.
Как правило, в результате автоматизации
технологического процесса создаётся
АСУ
ТП.
Основа автоматизации технологических
процессов — это перераспределение
потоков вещества и энергии в
соответствии с принятым критерием
управления (оптимальности).
Цели
автоматизации
Основными целями автоматизации
технологического процесса являются:
Задачи
автоматизации и их решение
Цели достигаются посредством решения
следующих задач автоматизации
технологического процесса:
Улучшение качества регулирования
Повышение коэффициента готовности
оборудования
Улучшение эргономики труда операторов
процесса
Хранение информации о ходе
технологического процесса и аварийных
ситуациях
Решение задач автоматизации
технологического процесса
осуществляется при помощи:
Автоматизация технологических
процессов в рамках одного
производственного процесса позволяет
организовать основу для внедрения
систем управления производством и
систем управления предприятием.
В связи с различностью подходов
различают автоматизацию следующих
технологических процессов:
Автоматизация непрерывных
технологических процессов (Process
Automation)
Автоматизация дискретных
технологических процессов (Factory
Automation)
Автоматизация гибридных технологических
процессов (Hybrid Automation)
Автоматизированная система управления
технологическим процессом (АСУ ТП) —
комплекс программных
и технических средств, предназначенный
для автоматизации
управления технологическим
оборудованием на предприятиях. Может
иметь связь с автоматизированной
системой управления предприятием
(АСУ П). Под АСУ ТП обычно понимается
комплексное решение, обеспечивающее
автоматизацию основных технологических
операций на производстве в целом
или каком-то его участке, выпускающем
относительно завершенный продукт.
Термин автоматизированный в отличие
от термина автоматический
подчеркивает возможность участия
человека в отдельных операциях, как
в целях сохранения человеческого
контроля над процессом, так и в связи
со сложностью или нецелесообразностью
автоматизации отдельных операций.
Составными частями АСУ ТП могут быть
отдельные системы
автоматического управления
(САУ)
и автоматизированные устройства,
связанные в единый комплекс. Как
правило АСУ ТП имеет единую систему
операторского управления
технологическим процессом в виде
одного или нескольких пультов
управления, средства
обработки и архивирования информации
о ходе процесса, типовые элементы
автоматики: датчики,
контроллеры,
исполнительные
устройства. Для информационной
связи всех подсистем используются
промышленные
сети.
Промышленная автоматика — общее
название разнообразных механических,
электрических, пневматических,
гидравлических
и электронных
устройств применяемых для автоматизации
технологических процессов, дискретных,
непрерывных и гибридных производств,
станков
с числовым
программным управлением,
зданий,
транспортных средств и транспортной
инфраструктуры, систем логистики,
промышленных
роботов.
Способы контроля промышленных
сетей. SCADA
системы
SCADA (аббр.
от англ. Supervisory
Control And
Data Acquisition,
Диспетчерское управление и сбор
данных) — данное понятие обычно
применяется к системе управления в
промышленности: система контроля и
управления
процессом с применением ЭВМ.
Процесс
может быть технологическим,
инфраструктурным или обслуживающим:
Технологические процессы включают —
производство,
выработку энергии, конструирование,
переработка.
Может протекать в непрерывном,
пакетном, периодическом или дискретном
режимах.
Инфраструктурные процессы могут
быть общественными либо частными,
и включают: обработку и распределение
воды, сбор и обработку сточных вод,
нефте- и газо- проводы, передачу и
распределение электроэнергии,
системы оповещения для гражданской
обороны, и большие системы связи.
Процессы в сфере обслуживания имеют
как частную так и общественную
стороны — здания, аэропорты,
корабли и космические станции. Они
контролируют и управляют HVAC,
доступом и потреблением энергии.
SCADA—система обычно содержит следующие
подсистемы:
Человеко-машинный
интерфейс (HMI,
англ. Human
Machine Interface) —
инструмент, который представляет
данные о ходе процесса человеку
оператору, что позволяет оператору
контролировать процесс и управлять
им.
Диспетчерская система — собирает
данные о процессе и отправляет
команды процессору (управление).
Абонентский оконечный блок, либо
УСО (RTU,
англ. Remote
Terminal Unit),
подсоединяемый к датчикам процесса,
преобразует сигнал с датчика в
цифровой код и отправляет данные в
диспетчерскую систему.
Программируемый
Логический Контроллер
(PLC, англ. Programmable
Logic Controller)
используется как полевое устройство
из-за экономичности, универсальности
и гибкости, нежели RTU специального
назначения.
Коммуникационная инфраструктура
для реализации промышленной
сети.
В некоторых отраслях промышленности,
существует значительная неопределенность
в различиях между SCADA системами и
распределенными системами управления
(DCS,
англ. Distributed
Control System —
распределённая
система управления). Вообще
говоря, понятие SCADA обычно применяется
к системе, которая координирует, но
не управляет процессами в режиме
реального времени. Дискуссия по
управлению в реальном времени
замутнена усовершенствованием
телекоммуникационных технологий.
Это дает надежный, с малыми задержками,
высокоскоростной обмен данными на
большие расстояния. Большинство
различий между SCADA и DCS установлено
человеком и обычно может игнорироваться.
По мере развития инфраструктуры
коммуникации различия между SCADA и
DCS стираются.
Основные
задачи
SCADA-системы решают ряд задач:
Обмен данными с УСО (устройства
связи с объектом, то есть с
промышленными контроллерами и
платами ввода/вывода) в реальном
времени через драйверы.
Обработка информации в реальном
времени.
Отображение информации на экране
монитора в удобной и понятной для
человека форме.
Ведение базы данных реального
времени с технологической информацией.
Аварийная сигнализация и управление
тревожными сообщениями.
Подготовка и генерирование отчетов
о ходе технологического процесса.
Осуществление сетевого взаимодействия
между SCADA ПК.
Обеспечение связи с внешними
приложениями (СУБД,
электронные
таблицы, текстовые
процессоры и т. д.). В системе
управления предприятием такими
приложениями чаще всего являются
приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать
АСУ
ТП в клиент-серверной или
в распределенной архитектуре.
Термин SCADA имеет двоякое толкование.
Наиболее широко распространено
понимание SCADA как приложения[2],
то есть программного комплекса,
обеспечивающего выполнение указанных
функций, а также инструментальных
средств для разработки этого
программного обеспечения. Однако,
часто под SCADA-системой подразумевают
программно-аппаратный комплекс.
Подобное понимание термина SCADA более
характерно для раздела телеметрия.
Термин SCADA эволюционировал вместе
с развитием технологий автоматизации
и управления технологическими
процессами. В 80-е годы под SCADA-системами
чаще понимали программно-аппаратные
комплексы сбора данных реального
времени. С 90-х годов термин SCADA больше
используется для обозначения только
программной части человеко-машинного
интерфейса АСУ ТП.
Семейства микроконтроллеров AVR
Архитектура
AVR была оптимизирована так, чтобы
соединить достоинства Гарвардской
и Принстонской (Фон Неймана) архитектуры
для достижения очень быстрого и
эффективного выполнения программ.
Такая организация обеспечивает
высокую эффективность процессора
при обработке данных.Основной идеей
всех RISC (Reduced Instruction Set Computer), как
известно, является увеличение
быстродействия за счет сокращения
количества операций обмена с памятью
программ. Для этого каждую команду
стремятся уместить в одну ячейку
памяти программ. При ограниченной
разрядности ячейки памяти это
неизбежно приводит к сокращению
набора команд микропроцессора.
У
AVR-микроконтроллеров в соответствии
с этим принципом практически все
команды (исключая те, у которых одним
из операндов является 16- разрядный
адрес) также упакованы в одну ячейку
памяти программ. Но сделать это
удалось не за счет сокращения
количества команд процессора, а
путем расширения ячейки памяти
программ до 16 разрядов. Такое решение
является причиной богатства системы
команд AVR по сравнению с другими
RISC- микроконтроллерами.
Организация
памяти AVR выполнена по схеме
Гарвардского типа, в которой разделены
не только адресные пространства
памяти программ и памяти данных, но
также и шины доступа к ним. Для более
углубленного понимания архитектуры
приведем две схемы.
Вся
программная память AVR-микроконтроллеров
выполнена по технологии
FLASH
и размещена на кристалле. Она
представляет собой последовательность
16-разрядных
ячеек и имеет емкость от 512 слов до
64K слов в зависимости от типа кристалла.
Разделение
шин доступа к FLASH памяти и SRAM памяти
дает возможность иметь шины данных
для памяти данных и памяти программ
различной разрядности, а также
использовать технологию конвейеризации.
Конвейеризация заключается в том,
что во время исполнения текущей
команды программный код следующей
уже выбирается из памяти и дешифрируется.
Микроконтроллеры AVR являются
разработкой и продуктом фирмы Atmel.
Отличие данных микроконтроллеров
от аналогичных, в довольно удачной
архитектуре ядра процессора и
широкому набору периферийных модулей,
что облегчает процесс программирования
устройства.
Технические характеристики
микроконтроллеров AVR:
частота до 16 МГц с временем выполнения
команды 62,5 нс;
встроенный
програмируемый RC-генератор, частота
1, 2, 4, 8 МГц;
Флэш-ПЗУ
программ,программируемое в системе,
до 128 кбайт;
двухпроводный
интерфейс TWI, совместимый с интерфейсом
I2C;
многоканальный
8-, 9-, 10-, 16-битный ШИМ-модулятор;
10-битный
АЦП со временем преобразования 70
мкс и дифференциальными входами;
программируемый коэффициент усиления
— 1; 10 или 200;
встроенный
источник опорного напряжения;
аналоговый
компаратор;
настраиваемая
схема задержки запуска после подачи
питания;
схема
слежения за напряжением питания;
JTAG-интерфейс для подключения
эмулятора;
электрически
перепрограммируемое ПЗУ данных до
4 кбайт;
внутреннее
ОЗУ со временем доступа 1 такт, до 4
кбайт;
мощный
набор команд (более 120 инструкций);
6 аппаратных
команд умножения (для семейства
mega);
развитая
система адресации, оптимизированная
для работы с С-компиляторами;
32 регистра
общего назначения (аккумулятора);
синхронный
(USART) или асинхронный (UART) последовательные
порты;
синхронный
последовательный порт (SPI); - потребление
тока 0.1 мА в активном режиме.
|
Стандартные семейства:
tinyAVR:
Флеш-память 8 Кб, SRAM 512 б, EEPROM 512 б;
Число линий ввод-вывода 4-18 (общее
количество выводов 6-32);
Ограниченный набор периферийных
устройств.
megaAVR:
Флеш-память 256 Кб, SRAM 8 Кб, EEPROM 4 Кб;
Число линий ввода-вывода 23-86 (общее
количество выводов 20-100);
Аппаратный умножитель;
Расширенная система команд и
периферийных устройств.
XMEGA AVR:
Флеш-память 384 Кб, SRAM 32 Кб, EEPROM 4 Кб;
Четырёхканальный DMA-контроллер;
Инновационная система обработки
событий.
На основе стандартных семейств
выпускаются микроконтроллеры,
адаптированные под конкретные
приложения:
со встроенными интерфейсами USB, CAN,
контроллером LCD;
со встроенным радиоприёмо-передатчиком
— серии ATAхxxx, ATAMxxx;
для управления электродвигателями
— серия AT90PWMxxxx;
для автомобильной электроники;
для осветительной техники.
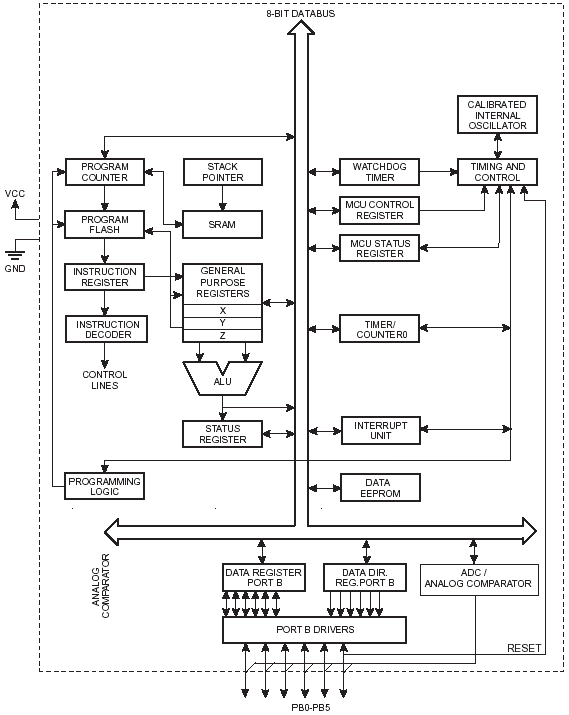
Программная модель AVR
На рисунке 1 изображена программная
модель AVR-микроконтроллеров, которая
представляет собой диаграмму программно
доступных ресурсов AVR. Центральным
блоком на этой диаграмме является
регистровый файл на 32 оперативных
регистра (R0-R31), непосредственно
доступных ALU. Старшие регистры (рис.
2) объединены парами и образуют три
16-разрядных регистра, предназначенных
для косвенной адресации ячеек памяти
(AVR без SRAM имеют только один 16-битный
регистр Z).

Рис. 1: Программная модель
AVR-микроконтроллеров.
Регистровый файл, блок регистров
ввода/вывода и оперативная память,
образуют единое адресное пространство,
что дает возможность при программировании
обращаться к 32 оперативным регистрам
и к регистрам ввода/вывода как к ячейкам
памяти, используя команды доступа к
SRAM (в том числе и с косвенной адресацией).
Все арифметические и логические
операции, а также часть операций работы
с битами выполняются в АЛУ только над
содержимым РОН. Следует обратить
внимание, что команды, которые в
качестве второго операнда имеют
константу (SUBI, SBCI, ANDI, ORI, SBR, CBR), могут
использовать в качестве первого
операнда только регистры из второй
половины РОН (R16-R31). Команды
16-разрядного сложения с константой
ADIW и вычитания константы SBIW в качестве
первого операнда используют только
регистры R24, R26, R28, R30. Во время выполнения
арифметических и логических операций
или операций работы с битами АЛУ
формирует те или иные признаки
результата операции, то есть устанавливает
или сбрасывает биты в регистре состояния
SREG (Status Register) . Признаки результата
операции могут быть затем использованы
в программе для выполнения дальнейших
арифметико-логических операций или
команд условных переходов.
Система команд AVR
Так же, как и у других встраиваемых
микроконтроллеров, система команд
АVR включает команды арифметических
и логических операций, команды передачи
данных, команды, управляющие
последовательностью выполнения
программы и команды операций с битами.
Имея 16-разрядную ячейку памяти программ,
AVR отличаются богатством своей системы
команд по сравнению с другими
RISC-микроконтроллерами.
Для удобства написания и анализа
программ всем операциям из системы
команд помимо двоичного кода сопоставлены
мнемокоды ассемблера (символические
обозначения операций), которые
используются при создании исходного
текста программы. Специальные
программы-трансляторы переводят затем
символические обозначения в двоичные
коды.
Младшие модели AVR не имеют некоторых
команд из приведенного списка. Основное
отличие заключается в том, что те
микроконтроллеры (AT90S1200, ATtiny10/11), у
которых отсутствует SRAM, не содержат
и соответствующих команд работы с
оперативной памятью. Кроме того,
AT90S1200 не имеет команд ADIW, SBIW, IJMP, ICALL,
LPM, а ATtiny10/11 - команд ADIW, SBIW, IJMP, ICALL.
Только MegaAVR имеют двухсловные,
выполняемые за три такта, команды
абсолютных переходов JMP и CALL. Всем
остальным типам AVR (Tiny и Classic) эти
медленные команды не нужны, так как
все адресное пространство объемом до
4K слов достижимо при помощи команд
относительных переходов RJMP, RCALL.
Также особняком стоит команда ELPM
страничного чтения FLASH памяти, которая
существует и необходима только для
ATmega103 ввиду увеличения размеров памяти
программ у этого микроконтроллера до
128K байт.
Подсчитывая количество инструкций в
системе команд AVR, видимо следует
обратить внимание на то, что для двух
команд из группы арифметических
операций существует по два мнемокода.
Мнемокоды ANDI и CBR а также ORI и SBR дублируют
друг друга, то есть транслируются в
один и тот же двоичный код. Выбор между
ними программист может выполнять
произвольно в зависимости от контекста
программы.
Таким образом, AVR-микроконтролеры в
зависимости от типа имеют 89 / 90 / 118 /
121 мнемокодов или 87 / 88 / 116 / 119 различных
двоичных кодов команд.
Специальная директива ассемблера
.device <типAVR>
обеспечивает контроль соответствия
команд, используемых в тексте программы,
типу указанного процессора.
При переходе от младших к старшим
моделям AVR существует совместимость
в смысле системы команд, однако
необходимо помнить, что адреса векторов
прерывания одних и тех же периферийных
узлов у различных типов AVR различны,
что требует внесения соответствующих
изменений в программу при ее переносе
на другой тип AVR.
Характеристики и особенности МК
AVR Tiny13
Высококачественный низкопотребляющий
8- битный AVR микроконтроллер
Передовая RISC архитектура
-
120 команд, большинство которых
выполняется за один тактовый цикл
-
32 8 битных рабочих регистра общего
применения
- Полностью
статическая архитектура
Энергонезависимая память программ
и данных
- 1 КБ
внутрисистемно программируемой Flash
памяти программы, способной выдержать
10 000 циклов записи/стирания
-
64 байта внутрисистемно программируемой
EEPROM памяти данных, способной выдержать
100 000 циклов записи/стирания
-
64 байта встроенной SRAM памяти (статическое
ОЗУ)
- Программируемая
защита от считывания самопрограммируемой
Flash памяти программы и EEPROM памяти
данных
Характеристики периферии
-
Один 8- разрядный таймер/счетчик с
отдельным предделителем и два ШИМ
канала
- 4 канальный
10 битный АЦП со встроенным ИОН
-
Программируемый сторожевой таймер
со встроенным генератором
-
Встроенный аналоговый компаратор
Специальные характеристики
микроконтроллера
-
Встроенный отладчик debugWIRE
-
Внутрисистемное программирование
через SPI порт
- Внешние
и внутренние источники прерывания
-
Режимы пониженного потребления Idle,
ADC Noise Reduction и Power-down
-
Усовершенствованная схема формирования
сброса при включении
-
Программируемая схема обнаружения
кратковременных пропаданий питания
-
Встроенный откалиброванный генератор
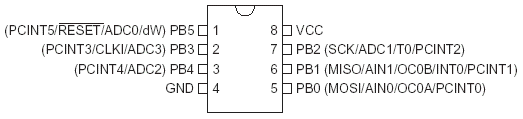
Порты ввода - вывода и корпусное
исполнение
- 8 выводные
PDIP и SOIC корпуса: 6 программируемых
линий ввода-вывода
Диапазон напряжения питания
-
от 1.8 до 5.5 В
Индустриальный рабочий температурный
диапазон
Потребление
- Активный
режим:
290 мкА
при частоте 1 МГц и напряжении питания
1.8 В
- Режим пониженного
потребления
0.5
мкА при напряжении питания 1.8 В
Архитектура МК AVR
Tiny13
Блок-
схема ATtiny13:
Расположение
выводов ATtiny13:
ATATtiny13
- низкопотребляющий 8 битный КМОП
микроконтроллер с AVR RISC архитектурой.
Выполняя команды за один цикл, ATtiny13
достигает производительности 1 MIPS при
частоте задающего генератора 1 МГц,
что позволяет разработчику оптимизировать
отношение потребления к производительности.
AVR
ядро объединяет богатую систему команд
и 32 рабочих регистра общего назначения.
Все 32 регистра непосредственно связаны
с арифметико-логическим устройством
(АЛУ), что позволяет получить доступ
к двум независимым регистрам при
выполнении одной команды. В результате
эта архитектура позволяет обеспечить
в десятки раз большую производительность,
чем стандартная CISC архитектура.
ATtiny13
имеет следующие характеристики: 1 КБ
внутрисистемно программируемой Flash
память программы, 64 байтную EEPROM память
данных, 64 байтное SRAM (статическое ОЗУ),
6 линий ввода - вывода общего применения,
32 рабочих регистра общего назначения,
8 битный таймер/счетчик со схемой
сравнения, внутренние и внешние
источники прерывания, 4 канальный 10
битный АЦП, программируемый сторожевой
таймер со встроенным генератором и
три программно инициализируемых
режима пониженного потребления. В
режиме Idle останавливается ядро, но
ОЗУ, таймер/счетчик, АЦП, аналоговый
компаратор и система прерываний
продолжают функционировать. В режиме
Power-down регистры сохраняют свое значение,
но генератор останавливается, блокируя
все функции прибора до следующего
прерывания или аппаратного сброса. В
режиме ADC Noise Reduction останавливается
вычислительное ядро и все модули
ввода-вывода за исключением АЦП, что
позволяет минимизировать шумы при
выполнении преобразования.
Прибор
изготовлен по высокоплотной
энергонезависимой технологии
изготовления памяти компании Atmel.
Встроенная ISP Flash позволяет
перепрограммировать память программы
в системе через последовательный SPI
интерфейс программой-загрузчиком,
выполняемой в AVR ядре, или обычным
программатором энергонезависимой
памяти.
ATtiny13
поддерживается различными программными
средствами и интегрированными
средствами разработки, такими как
компиляторы C, макроассемблеры,
программные отладчики/симуляторы,
внутрисхемные эмуляторы и ознакомительные
наборы.
|

