

Колебания физического маятника
Рассмотрим тело, имеющее закрепленную ось вращения O (рис. 4). В состоянии равновесия центр масс этого тела C будет находиться ниже точки O на одной с ней вертикали. Если отклонить тело от положения равновесия на некоторый угол , то оно будет колебаться. Такое тело называется физическим маятником.
На тело действует
сила тяжести
![]() ,
момент которой равен
,
момент которой равен
![]() ,
где
,
где
![]() — плечо этой силы относительно оси O,
b
— расстояние от оси O
до центра масс C.
Сила реакции опоры приложена к точке
O,
поэтому плечо этой силы и ее момент
равны нулю. Таким образом, если пренебречь
трением, то на тело действует единственный
вращающий момент — момент силы тяжести.
— плечо этой силы относительно оси O,
b
— расстояние от оси O
до центра масс C.
Сила реакции опоры приложена к точке
O,
поэтому плечо этой силы и ее момент
равны нулю. Таким образом, если пренебречь
трением, то на тело действует единственный
вращающий момент — момент силы тяжести.
Основное уравнение вращательного движения (6) запишется так:
![]() ,
,
где
![]() — угловое ускорение. Допустим, что тело
может, вращаясь вокруг оси O,
совершать лишь малые колебания. Тогда
ввиду малости угла
(угол выражается в радианах)
— угловое ускорение. Допустим, что тело
может, вращаясь вокруг оси O,
совершать лишь малые колебания. Тогда
ввиду малости угла
(угол выражается в радианах)
![]() ,
и уравнение вращательного движения
примет вид
,
и уравнение вращательного движения
примет вид
![]() .
.
Приведем эту формулу к виду
(9)
![]() .
.
Уравнение такого вида описывает гармонические колебания, т. е. его решение имеет вид
(
Рис. 4.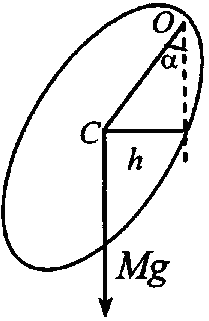
![]() ,
,
где амплитуда
колебаний
![]() и начальная фаза
могут быть произвольными, а круговая
частота
и начальная фаза
могут быть произвольными, а круговая
частота
![]() должна быть найдена из уравнения (9). Для
нахождения
возьмем
в виде (10), дважды продифференцируем это
выражение по времени и подставим в (9).
Тогда получим:
должна быть найдена из уравнения (9). Для
нахождения
возьмем
в виде (10), дважды продифференцируем это
выражение по времени и подставим в (9).
Тогда получим:
![]() .
.
Сократив
![]() ,
получим
,
получим
![]() .
.
Так как период
колебаний — это время, за которое фаза
![]() в (10) изменится на 2,
то
в (10) изменится на 2,
то
![]() .
.
Тогда окончательно:
(11)
![]() .
.
Описание работы
Установка представляет собой колесо, к которому прикрепляется небольшой шарик (рис. 5). Колесо может свободно вращаться вокруг оси. В частности, оно может совершать колебания около этой оси и тогда представляет собой физический маятник. Для нахождения момента инерции колеса можно воспользоваться формулой для периода колебаний физического маятника (11), если в этой формуле общий момент инерции колеса и шарика
![]() ,
,
их общая масса
![]() ,
m
— масса шарика, b
— расстояние от оси колеса до общего
центра масс колеса и шарика. Для нахождения
b
воспользуемся формулой для координаты
центра масс:
,
m
— масса шарика, b
— расстояние от оси колеса до общего
центра масс колеса и шарика. Для нахождения
b
воспользуемся формулой для координаты
центра масс:
![]() ,
,
где
![]() — координаты соответственно общего
центра масс, центра шарика и центра
колеса. Если начало координат находится
на оси колеса, то
— координаты соответственно общего
центра масс, центра шарика и центра
колеса. Если начало координат находится
на оси колеса, то
![]() ввиду симметрии,
ввиду симметрии,
![]() по обозначению,
по обозначению,
![]() — расстояние от оси колеса до центра
шарика, равное сумме радиусов колеса и
шарика. Тогда искомое расстояние от оси
колеса до общего центра масс равно
— расстояние от оси колеса до центра
шарика, равное сумме радиусов колеса и
шарика. Тогда искомое расстояние от оси
колеса до общего центра масс равно
![]() .
.
Рис. 5.
Подставив b, I, M в формулу (11), получим выражение для периода колебаний колеса с шариком:
(12)
 .
.
Разрешив уравнение
относительно
![]() ,
получим
,
получим
(13)
![]() .
.
Момент инерции
шарика равен
![]() ,
где R
— радиус шарика,
,
где R
— радиус шарика,
![]() — его момент инерции относительно оси,
проходящей через центр шарика, а
— его момент инерции относительно оси,
проходящей через центр шарика, а
![]() — добавка по теореме Штейнера. Тогда
формула (13) примет окончательный вид
— добавка по теореме Штейнера. Тогда
формула (13) примет окончательный вид
(14)
![]() ,
,
где
![]() (r
— радиус колеса).
(r
— радиус колеса).
Обычно для нахождения массу шарика m определяют на технических весах, радиус колеса и радиус шарика R — при помощи штангенциркуля. В нашей работе следует взять массу шарика равной 501 г, а размеры шарика и колеса определить при помощи линейки, помещенной на экран, которую можно перемещать с помощью «мышки».
Для нахождения
периода колебаний T
измеряют время
![]() или более полных колебаний несколько
раз (5 или более) и вычисляют среднее
время
или более полных колебаний несколько
раз (5 или более) и вычисляют среднее
время
![]() ,
а затем средний период колебаний
,
а затем средний период колебаний
![]() .
Погрешность измерения времени
.
Погрешность измерения времени
![]() секундомером обычно находят по формуле
секундомером обычно находят по формуле
![]() ,
,
где систематическая
погрешность измерения времени принимается
равной
![]() (главным образом из-за запаздывания
реакции экспериментатора), а случайная
погрешность
(главным образом из-за запаздывания
реакции экспериментатора), а случайная
погрешность
![]() следует вычислить как среднеквадратическое
отклонение
следует вычислить как среднеквадратическое
отклонение
 ,
,
где N — число измерений.
Погрешность
измерения периода в n
раз (n
— число колебаний) меньше, то есть
![]() .
.
Итоговая погрешность измерения момента инерции колеса запишется в виде
![]() ,
,
где
 ,
,
 ,
,
 ,
,
а, в свою очередь,
![]() .
.
В этих формулах
погрешность измерения массы на технических
весах
![]() принимается равной доле грамма или даже
целому грамму (возьмите равной 1 г).
Погрешность измерения радиусов линейкой
принимается равной доле грамма или даже
целому грамму (возьмите равной 1 г).
Погрешность измерения радиусов линейкой
![]() и
и![]() равна 1-2 мм. Для нахождения радиусов
измеряются диаметры тел.
равна 1-2 мм. Для нахождения радиусов
измеряются диаметры тел.