

Бланк№2
.docПряма багаторазова засічка
Вихідні дані :
Значення вихідних координат і дирекцій них кутів
№ трикутника і напряму |
Координати, м |
,,Початкові дирекційні кути, α’і,р |
|
Х |
У |
||
1. |
|
|
|
2. |
|
|
|
3. |
|
|
|
4. |
|
|
|
![]()
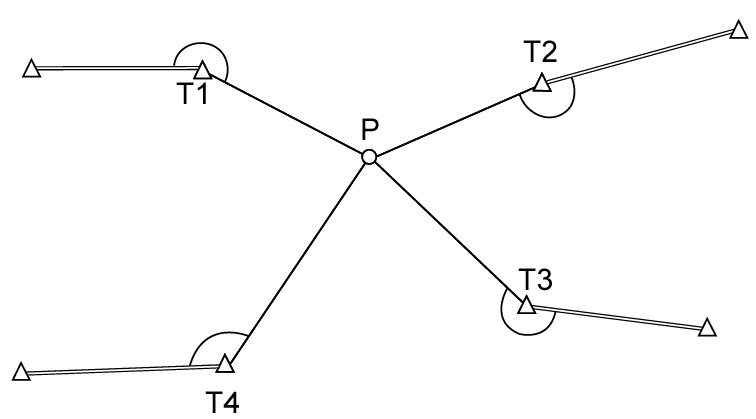
1. Знайти наближені значення координат {Х°р;У˚р) пункту Р. Для
цього за двома підібраними напрямами розв'язати пряму одноразову засічку, застосувавши формули Гауса. Підібрати напрями за умови: наближені координати будуть більш достовірними, якщо кут перетину ε двох напрямів буде близький до 90°.
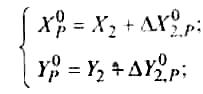
Формули для визначення наближених координат пункту Р :
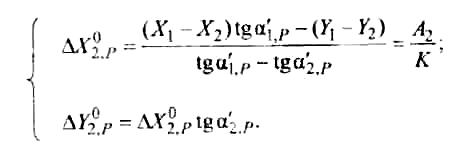
![]()
де

Контроль
Розбіжність у значеннях координат, обчислених за основною і контрольною формулами, не повинна перевищувати 2-3 мм.
Обчислення наближених значень координат пункту Р
Найменування |
Значення |
Контроль |
|
Найменування |
Значення |
||
ΔY2,1=Y1-Y2 |
|
ΔХ2,1tgα1,p |
|
ΔХ2,1=Х1-Х2 |
|
A2 |
|
ΔХ2,1tgα2,p |
|
ΔХ02,p |
|
A1 |
|
ΔY02,p |
|
K |
|
Х0p |
|
ΔХ01,p |
|
Y0p |
|
ΔY01,p |
|
|
|
Х0p |
|
||
Y0p |
|
||
2. Скласти рівняння поправок. Поправки знаходимо до "початкових" дирекційних кутів, тому рівнянь буде стільки, скільки напрямів з вихідних пунктів на визначуваний. У параметричному вигляді рівняння поправок записують так:
![]()
де аі, bi - коефіцієнти, а li - вільні члени рівнянь поправок;
![]() - поправки до наближених
координат;
- поправки до наближених
координат;
υi - поправки в "початкові" дирекційні кути.
Для обчислення коефіцієнтів і вільних членів рівнянь поправок необхідно знати наближені значення дирекційних кутів α0i,p і відстаней L0i,p. Їх находять за наближеними координатами із вирішення обернених геодезичних задач.
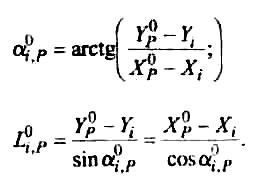
Розв’язання оберненої геодезичної задачі за наближеними координатами
Номер напряму |
|
|
α0i,p |
L0i,p, км |
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|
|
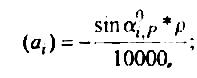
3. Обчислити коефіцієнти та вільні члени рівнянь поправок. Коефіцієнти рівнянь поправок:
![]()
![]()
д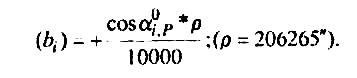 е
е
Вільні члени рівнянь поправок:
![]()
Контрольні суми Si знаходять за формулою:
![]()
а значення [S] отримують як суму Si за стовпцем:
![]()
і контролюють, складаючи нижній рядок:
![]()
Аналогічно контролюють і правильність обчислення коефіцієнтів нормальних рівнянь.
Обчислення коефіцієнтів та вільних членів рівнянь поправок
Номер пункту |
(ai) |
(bi) |
ai |
bi |
li |
Si |
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
Σ |
|
|
|
|
|
|
4. Скласти систему нормальних рівнянь і розв'язати її. Загальний вигляд системи двох нормальних рівнянь:

Обчислення коефіцієнтів нормальних рівнянь
Номер пункту |
aa |
ab |
al |
aS |
bb |
bl |
bS |
ll |
1 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
Σ |
|
|
|
|
|
|
|
|
Нормальні рівняння:
|
||||||||
Систему двох рівнянь з двома невідомими можна розв'язати методом визначників.
![]()
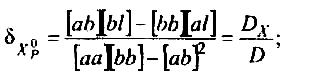
Розв’язання нормальних рівнянь
Найменування |
Значення |
D |
|
DX |
|
DY |
|
|
|
|
|
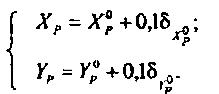
5. Знайти зрівняне значення координат пункту Р.При визначенні координат треба зважати на те, що із вирішення системи нормальних рівнянь поправки і отримані в
дециметрах, тому:
Зрівняні значення координат пункту Р
Найменування |
Значення |
XP |
|
YP |
|
6. Знайти поправки до "початкових" дирекційних кутів і обчислити зрівняні дирекційні кути.Обчислення виконують за формулами:
К![]() онтроль
обчислень:
сума
[vv],
отримана
за формулою:
онтроль
обчислень:
сума
[vv],
отримана
за формулою:
і сума [vv], не повинні відрізнятись більше, як на величину Δпр:
![]()
Обчислення зрівняних значень дирекційних кутів
№ напрямку |
|
|
li |
vi |
v2i |
αi,p |
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
Σ |
|
|
|
|
|
|
Контроль:
Припустима розбіжність Δпр=
|
||||||
7. Виконати підсумковий контроль. Для цього по зрівняних координатах ХР і YP пункту Р знайти дирекційні кути αi,p і порівняти їх. Розходження не повинні перевищувати 0,3".
Обчислення дирекційних кутів за зрівняними координатами
№ напрямку |
|
|
αi,p |
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
8. Виконати оцінку точності зрівняних координат.Середня квадратична похибка положення пункту Р:
![]()
Середня квадратична похибка положення пункту Р вздовж осі X:
![]()
Середня квадратична похибка положення пункту Р вздовж осі Y:
![]()
Середня квадратична похибка визначення дирекційного кута:
![]() .
.
Вага зрівняної координати X:
![]() .
.
Вага зрівняної координати Y:
![]()
Оцінка точності зрівняних координат
Позначення |
Значення |
mά |
|
PX |
|
PY |
|
mX |
|
mY |
|
mP |
|
![]()