

4. Особливості конструкцій та розрахунку лінійного асинхронного двигуна.
Лінійний асинхронний двигун (ЛАД) – це, як правило асинхронний двигун з масивним ротором – бігуном, який може бути феромагнітним або немагнітним (див. рис. 5 відповідно виконання б) та а), в)).
ЛАД можна подумки представити як розгортку АД циліндричного виконання (див. рис. 5, г). У випадку немагнітного бігуна статор повинен мати двобічний магнітопровід, який може бути обмотаний з обох (рис. 5, а) або тільки з одного боку (рис. 5, в).
Статор ЛАД утворює біжне електромагнітне поле, яке взаємодіючи з вихровими струмами бігуна, утворює тягове зусилля F, яке спричиняє поступальний рух бігуна за полем. Звичайно довжина бігуна більша від довжини статора, або навпаки, з таким розрахунком, щоби тягове зусилля двигуна в межах ходу бігуна було постійним. Якщо масив, в якому утворюються вихрові струми, закріпити, то поступальний рух буде виконувати магнітопровід з обмоткою.
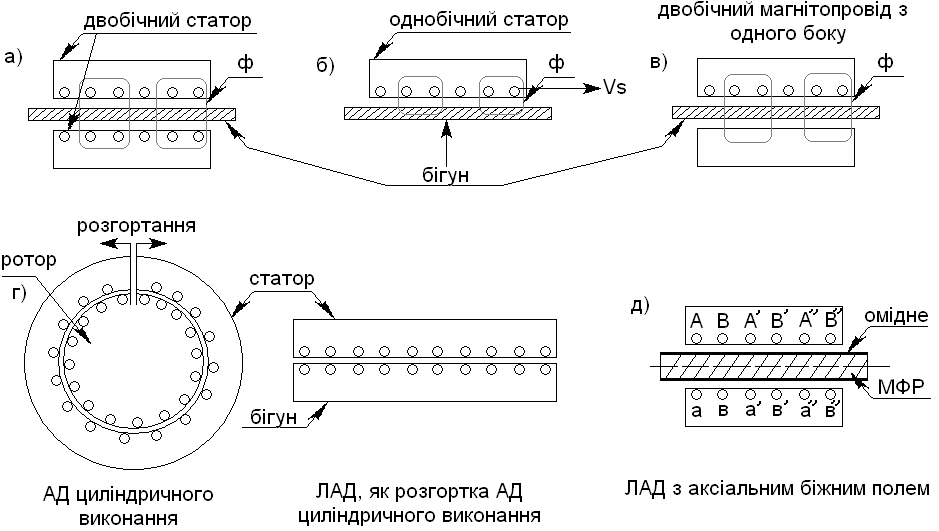
Рис. 5. Конструкційні виконання ЛАД
В багатьох механізмах шлях бігуна обмежується, а його рух тоді є зворотньо-поступальним. Реверсу досягають зміною чергування фаз обмотки статора в кінці шляху, що приводить до реверсування біжного поля. Такі ЛАД виконують з критичним ковзанням Sкр 1, і номінальним ковзанням Sн 0,1 0,3.
В ЛАД, показаних на рис. 5, а, б, в, г біжна хвиля електромагнітного поля, а за нею і бігун переміщаються перпендикулярно до напряму активних сторін котушок і тому такий ЛАД називають машиною з поперечним магнітним полем. Якщо цей ЛАД знову згорнути в циліндр, але так, щоби активні сторони котушок обмотки статора уклалися у витки нової обмотки, яка стає гвинтовою m – фазнозахідною обмоткою (див. рис. 5, г), то така обмотка теж утворить біжне поле, напрям переміщення якого збігається з віссю котушок нової обмотки. Асинхронні ЛАД двигуни такої конструкції виконання називають ЛАД з аксіальним полем.
Лінійну швидкість переміщення біжного поля ЛАД V3 можна обчислити
![]() ,
(15)
,
(15)
а ковзання ЛАД
S=![]() ,
(16)
,
(16)
ДеV – лінійна швидкість бігуна; – полюсний поділ біжної хвилі поля.
Тягове зусилля ЛАД F визначається за виразом
![]() ,
(17)
,
(17)
де Me –величина електромагнітного моменту АМ, обчислена подібно, як для еквівалентного циліндричного виконання на основі заступної її схеми.
Основною особливістю фізичних явищ в ЛАД є наявність кінцевих ефектів, які виникають внаслідок розриву магнітного кола машини на її кінцях. Магнітні провідності крайніх секцій обмотки менші ніж середніх. Обмотка машини стає якби несиметричною, і як в ? машині крім прямобіжної основної хвилі появляються додаткові біжні хвилі поля, які можуть істотно зменшити її тягове зусилля.
Особливості розрахунку ЛАД розглянемо на прикладі двигуна з поперечним полем та з немагнітним бігуном, який має двобічний короткий статор. Модель цієї машини наведена на рис.6.
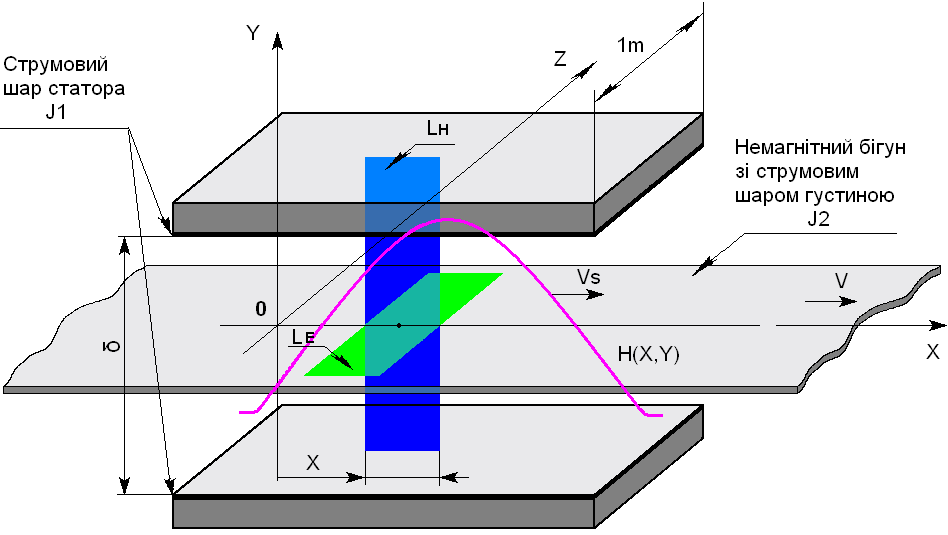
Рис.6. Модель ЛАД з поперечним полем та з немагнітним бігуном
Користуючись цією моделлю ЛАД складемо рівняння Максвела машини в диференційній формі, використовуючи кординатну систему x, y, z статора
![]() ;
;
![]() ,
,
де V – швидкість переміщення бігуна.
Як видно з моделі, наше поле одномірне:
![]() ;
;
![]() ;
(19)
;
(19)
Ці ж рівняння в інтегральній фoрмі мають вигляд
![]() ,
(20a)
,
(20a)
![]() .
(20б)
.
(20б)
В
рівняннях (18), (20) позначено J(1,2)
– густина струмового шару машини
(статора, ротора); LH
– контур інтегрування по
![]() ;
SH
– площа, яку охоплює контур LH;
LE
– контур інтегрування по
;
SH
– площа, яку охоплює контур LH;
LE
– контур інтегрування по
![]() ;
SE
– площа, яку охоплює контур LE.
Для одномірного поля, нехтуючи спадами
напруженості в проводах, матимемо
;
SE
– площа, яку охоплює контур LE.
Для одномірного поля, нехтуючи спадами
напруженості в проводах, матимемо
![]() ;
;
![]() ,
,
або
![]() ,
,
![]() .
.
З другого рівняння системи (21) визначимо і підставимо це значення у перше рівняння цієї ж системи, після чого отримуємо
![]() .
(22)
.
(22)
Розв’язок рівняння (22) шукаємо для усталеного режиму, як частковий розв’язок неоднорідного рівняння при відомій густині струму статора
![]() (23)
(23)
у вигляді
![]() .
.
Підставляючи розв’язок (23) в (22) отримаємо
 ;
;
![]() .
(24)
.
(24)
Точний розв’язок рівняння (22) ще має включати загальний розв’язок однорідного рівняння (22), для отримання якого у (22) використаємо підтановку
B(x,t)=X(x)T(t). (25)
Використовуючи (25) у (22) без правої частини, розділивши змінні, отримаємо
![]() ,
(26)
,
(26)
де – стала величина
З рівняння
![]() (27)
(27)
визначаємо
![]() ,
де С–
стала інтегрування
,
де С–
стала інтегрування
Подібно з рівняння
![]() (28)
(28)
визначаємо
![]() ,
(29)
,
(29)
де
 – корені характеристичного рівняння
(28).
– корені характеристичного рівняння
(28).
Стала
в загальному випадку може бути дійсною,
уявною або комплексною величиною, але
для нашого випадку, коли розглядаються
усталені процеси і джерелом живлення
є періодична НС статора з частотою
![]() ,
ми повинні прийняти
,
ми повинні прийняти
![]() .Враховуючи
це можемо представити
.Враховуючи
це можемо представити
і далі
 (30)
(30)
де
![]() ;
;
![]() ;
;
![]() .
.
Тому кінцево рзвя’зок (22), враховуючи (24), (29) та (30) можемо записати у вигляді
![]() .
(31)
.
(31)
Усі
складові рзв’язку (31) є періодичними
функціями часу. Перша складова, судячи
за її структурою, це основна вимушена
прямобіжна хвиля поля, параметри якої
визначаються співвідношеннями (23), (24).
Другий доданок (31) це прямобіжна згасальна
з коефіцієнтом
![]() хвиля поля, зумовлена розривом
магнітопровода машини зі сторони входу
основної хвилі. Третій доданок – це
зворотньобіжна згасальна з коефіцієнтом
хвиля поля, зумовлена розривом
магнітопровода машини зі сторони входу
основної хвилі. Третій доданок – це
зворотньобіжна згасальна з коефіцієнтом
![]() хвиля поля, зумовлена розривом
магнітопроводу машини зі сторони виходу
основної хвилі. Два останні доданки,
тобто обдві згасальні хвилі поля,
зумовлені кінцевими ефектами мають
однакову довжину півхвилі
хвиля поля, зумовлена розривом
магнітопроводу машини зі сторони виходу
основної хвилі. Два останні доданки,
тобто обдві згасальні хвилі поля,
зумовлені кінцевими ефектами мають
однакову довжину півхвилі
![]() ,
яка відрізняється від довжини півхвилі
основного поля ,
та мають однакові швидкості переміщення
,
яка відрізняється від довжини півхвилі
основного поля ,
та мають однакові швидкості переміщення
![]() .
(32)
.
(32)
Але
глибина проникнення прямобіжної
згасальної хвилі
![]() – більша від глибини проникнення
зворотньозгасальної біжної згасальної
хвилі і тому прямобіжна хвиля кінцевого
ефекту може проникнути до кінця
магнітопроводу машини та істотно змінити
її результуюче поле ї характеристики.
Зворотньобіжна хвиля кінцевого ефекту
згасає швидко та існує тільки поблизу
вихідного кінця. Вона не може істотно
змінити результуюче поле машини і тому
нею звичайно нетують. Отже, основна
хвиля поля та згасальна прямобіжна
хвиля кінцевого ефекту інтерферуючи
між собою залежно від швидкості
переміщення бігуна можуть або підсилювати
або ослабляти одна одну і від цього
буде залежати величина результуючого
поля машини та її тягове зусилля.
– більша від глибини проникнення
зворотньозгасальної біжної згасальної
хвилі і тому прямобіжна хвиля кінцевого
ефекту може проникнути до кінця
магнітопроводу машини та істотно змінити
її результуюче поле ї характеристики.
Зворотньобіжна хвиля кінцевого ефекту
згасає швидко та існує тільки поблизу
вихідного кінця. Вона не може істотно
змінити результуюче поле машини і тому
нею звичайно нетують. Отже, основна
хвиля поля та згасальна прямобіжна
хвиля кінцевого ефекту інтерферуючи
між собою залежно від швидкості
переміщення бігуна можуть або підсилювати
або ослабляти одна одну і від цього
буде залежати величина результуючого
поля машини та її тягове зусилля.
Якщо прийняти, що густина струму J1, яка визначається за (23), є сталою по довжині машини, то миттєве значення зусилля двигуна обчислюється
![]() ,
(33)
,
(33)
де B(x) – визначають за (31), D – довжина пакету магнітопроводу, L– довжина індуктора.
Середнє значення тягового зусилля машини Fcp обчислюється за виразом
 ,
(34)
,
(34)
де
![]() –
величина, спряжена з
–
величина, спряжена з
![]() ,
яка визначається з (23)
,
яка визначається з (23)
На рис.7
показана залежність тягового зусилля
![]() для ЛАД з постійним значенням густини
струму, коли не врахована згасальна
прямобіжна хвиля кінцевого ефекту –
крива 1 та врахована – крива 2. [Ямамура
ЭА Изд. ЛО 1983].
для ЛАД з постійним значенням густини
струму, коли не врахована згасальна
прямобіжна хвиля кінцевого ефекту –
крива 1 та врахована – крива 2. [Ямамура
ЭА Изд. ЛО 1983].

Рис.7. Залежність зусилля при розмірі індуктора – 5000х5000мм2
До ЛАД за фізичними явищами дуже подібними є АД з дуговим статором., конструкційна схема якого наведена на рис. ? Звичайно діаметр D феромагнітного барабана, який тут виконує роль ротора є задання і досягає значної величини, а його частота обертання повинна бути низькою.
Щоби забезпечити цю частоту кількість пар полюсів р машини повинна бути достатньо великою. Якщо для того отримати на валу барабана потрібний електромагнітний момент достатньо розташувати обмотку статора не на повній дузі 360, а на дузі D (див. рис.8).
Рис.8. Конструкційна схема AD з дуговим статором
Тоді кутову синхронну частоту обертання поля двигуна з кількістю пар полюсів PD – CD можна записати через лін.синхр.швидк
![]() ,
,
![]() ,
,
де 2p=DR (див.рис.8); R=
Електромагнітний момент такої машини
![]() ,
,
де р –
кількість пар полюсів машини, якщо би
в машині була би обмотка статора по
повній його дузі 360
з кількістю пар полюсів
![]() .
.